 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Transformers
Nov 12, 2020We show that Transformers are Maximum Posterior Probability estimators for Mixtures of Gaussian Models. This brings a probabilistic point of view to Transformers and suggests extensions to other probabilistic cases.
Deep Active Object Recognition by Joint Label and Action Prediction
Dec 17, 2015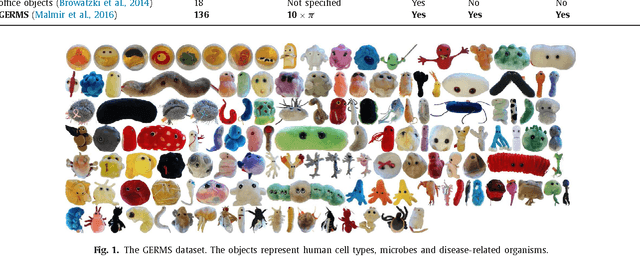
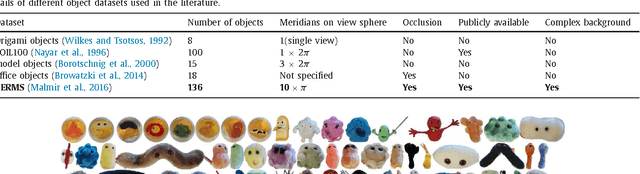
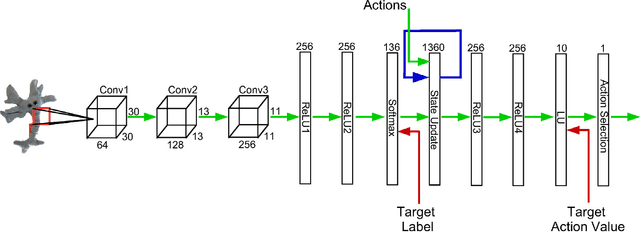
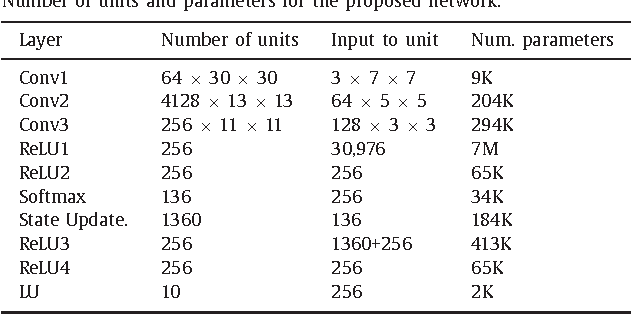
An active object recognition system has the advantage of being able to act in the environment to capture images that are more suited for training and that lead to better performance at test time. In this paper, we propose a deep convolutional neural network for active object recognition that simultaneously predicts the object label, and selects the next action to perform on the object with the aim of improving recognition performance. We treat active object recognition as a reinforcement learning problem and derive the cost function to train the network for joint prediction of the object label and the action. A generative model of object similarities based on the Dirichlet distribution is proposed and embedded in the network for encoding the state of the system. The training is carried out by simultaneously minimizing the label and action prediction errors using gradient descent. We empirically show that the proposed network is able to predict both the object label and the actions on GERMS, a dataset for active object recognition. We compare the test label prediction accuracy of the proposed model with Dirichlet and Naive Bayes state encoding. The results of experiments suggest that the proposed model equipped with Dirichlet state encoding is superior in performance, and selects images that lead to better training and higher accuracy of label prediction at test time.
Variable and Fixed Interval Exponential Smoothing
Feb 11, 2015Exponential smoothers are a simple and memory efficient way to compute running averages of time series. Here we define and describe practical properties of exponential smoothers for signals observed at constant and variable intervals.