 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Autonomy Emerges from Self-Play
Feb 05, 2025Self-play has powered breakthroughs in two-player and multi-player games. Here we show that self-play is a surprisingly effective strategy in another domain. We show that robust and naturalistic driving emerges entirely from self-play in simulation at unprecedented scale -- 1.6~billion~km of driving. This is enabled by Gigaflow, a batched simulator that can synthesize and train on 42 years of subjective driving experience per hour on a single 8-GPU node. The resulting policy achieves state-of-the-art performance on three independent autonomous driving benchmarks. The policy outperforms the prior state of the art when tested on recorded real-world scenarios, amidst human drivers, without ever seeing human data during training. The policy is realistic when assessed against human references and achieves unprecedented robustness, averaging 17.5 years of continuous driving between incidents in simulation.
OpenBot-Fleet: A System for Collective Learning with Real Robots
May 13, 2024We introduce OpenBot-Fleet, a comprehensive open-source cloud robotics system for navigation. OpenBot-Fleet uses smartphones for sensing, local compute and communication, Google Firebase for secure cloud storage and off-board compute, and a robust yet low-cost wheeled robot toact in real-world environments. The robots collect task data and upload it to the cloud where navigation policies can be learned either offline or online and can then be sent back to the robot fleet. In our experiments we distribute 72 robots to a crowd of workers who operate them in homes, and show that OpenBot-Fleet can learn robust navigation policies that generalize to unseen homes with >80% success rate. OpenBot-Fleet represents a significant step forward in cloud robotics, making it possible to deploy large continually learning robot fleets in a cost-effective and scalable manner. All materials can be found at https://www.openbot.org. A video is available at https://youtu.be/wiv2oaDgDi8
A Measure of Research Taste
May 17, 2021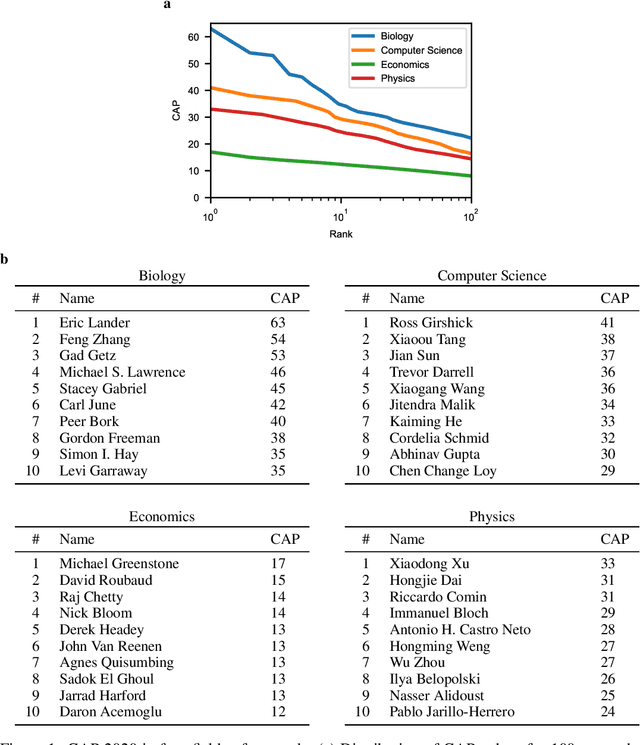

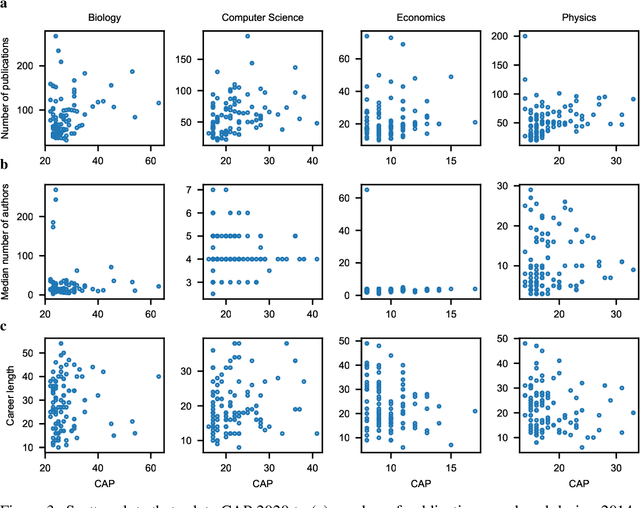
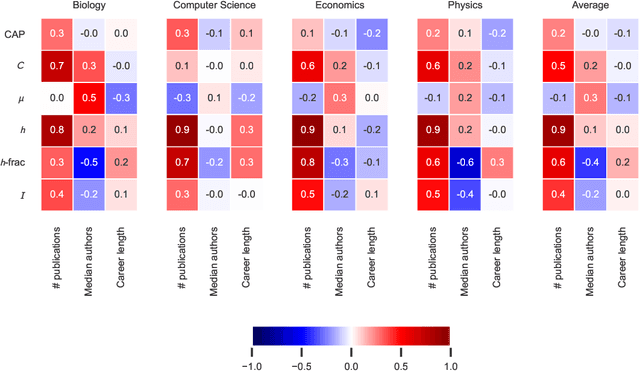
Researchers are often evaluated by citation-based metrics. Such metrics can inform hiring, promotion, and funding decisions. Concerns have been expressed that popular citation-based metrics incentivize researchers to maximize the production of publications. Such incentives may not be optimal for scientific progress. Here we present a citation-based measure that rewards both productivity and taste: the researcher's ability to focus on impactful contributions. The presented measure, CAP, balances the impact of publications and their quantity, thus incentivizing researchers to consider whether a publication is a useful addition to the literature. CAP is simple, interpretable, and parameter-free. We analyze the characteristics of CAP for highly-cited researchers in biology, computer science, economics, and physics, using a corpus of millions of publications and hundreds of millions of citations with yearly temporal granularity. CAP produces qualitatively plausible outcomes and has a number of advantages over prior metrics. Results can be explored at https://cap-measure.org/