 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Autonomy Emerges from Self-Play
Feb 05, 2025Self-play has powered breakthroughs in two-player and multi-player games. Here we show that self-play is a surprisingly effective strategy in another domain. We show that robust and naturalistic driving emerges entirely from self-play in simulation at unprecedented scale -- 1.6~billion~km of driving. This is enabled by Gigaflow, a batched simulator that can synthesize and train on 42 years of subjective driving experience per hour on a single 8-GPU node. The resulting policy achieves state-of-the-art performance on three independent autonomous driving benchmarks. The policy outperforms the prior state of the art when tested on recorded real-world scenarios, amidst human drivers, without ever seeing human data during training. The policy is realistic when assessed against human references and achieves unprecedented robustness, averaging 17.5 years of continuous driving between incidents in simulation.
Stanford Pupper: A Low-Cost Agile Quadruped Robot for Benchmarking and Education
Oct 02, 2021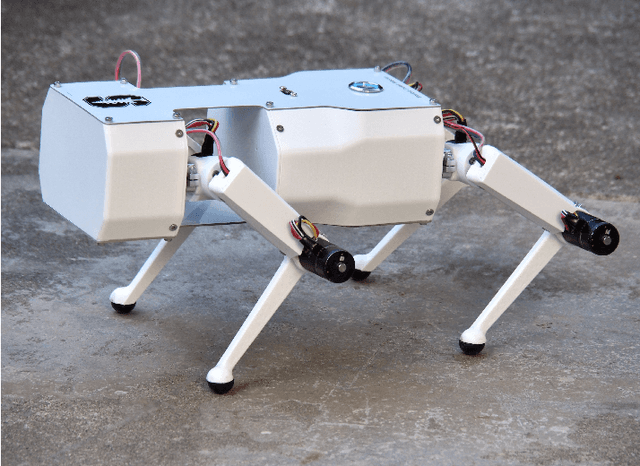
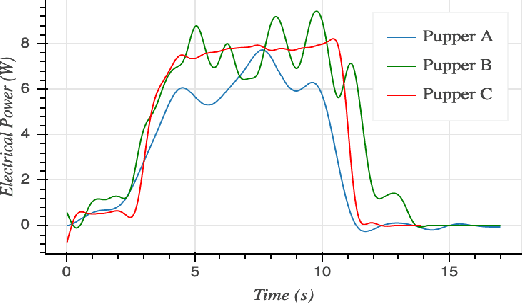
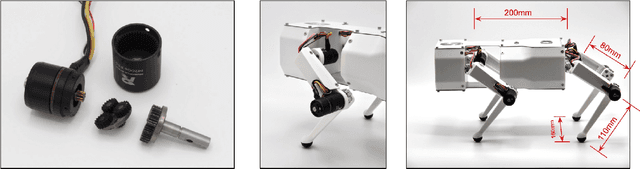

We present Stanford Pupper, an easily-replicated open source quadruped robot designed specifically as a benchmark platform for legged robotics research. The robot features torque-controllable brushless motors with high specific power that enable testing of impedance and torque-based machine learning and optimization control approaches. Pupper can be built from the ground up in under 8 hours for a total cost under $2000, with all components either easily purchased or 3D printed. To rigorously compare control approaches, we introduce two benchmarks, Sprint and Scramble with a leader board maintained by Stanford Student Robotics. These benchmarks test high-speed dynamic locomotion capability, and robustness to unstructured terrain. We provide a reference controller with dynamic, omnidirectional gaits that serves as a baseline for comparison. Reproducibility is demonstrated across multiple institutions with robots made independently. All material is available at https://stanfordstudentrobotics.org/quadruped-benchmark.