 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLook Further: Socially-Compliant Navigation System in Residential Buildings
May 26, 2026The distance at which a mobile robot reacts to a person strongly impacts various qualities of the human-robot interaction. In this paper, we focus on the navigation of a mobile delivery robot platform in a residential indoor hallway environment. Social navigation methods typically focus on avoiding uncomfortable human-robot interactions, such as when a robot encroaches on someone's personal space. Since personal space has been shown to be in the range of just a few meters, social navigation methods typically focus on deconflicting and resolving these short-range interactions. In this work, however, we demonstrate that by extending the reaction distance to over eight meters, far beyond the typical interaction distance, we can improve the human's perception of the robot's motion. We introduce the Proactive Lane-Changing (PLC) motion pattern and a navigation system that leverages it to react to people at an increased distance. This pattern consists of changing the robot's lateral position as it navigates down the hallway from the center to the side at an eight-meter distance from an oncoming person. We conducted a user study with 42 participants to assess their impressions of the delivery robot based on three service objectives: safety, smoothness, and politeness. In the straight hallway scenario (Frontal Approach), results showed significant improvement in each of these three objectives compared to typical motion patterns found in the literature: slowing down, stopping, and reactive collision avoidance in the proximity of a person. In contrast, in the intersection (Blind Corner) scenarios, none of the approaches performed significantly better than any other, with participants having a diverse range of preferences among robot motion patterns.
* 2025 ACM/IEEE International Conference on Human-Robot Interaction
Stanford Pupper: A Low-Cost Agile Quadruped Robot for Benchmarking and Education
Oct 02, 2021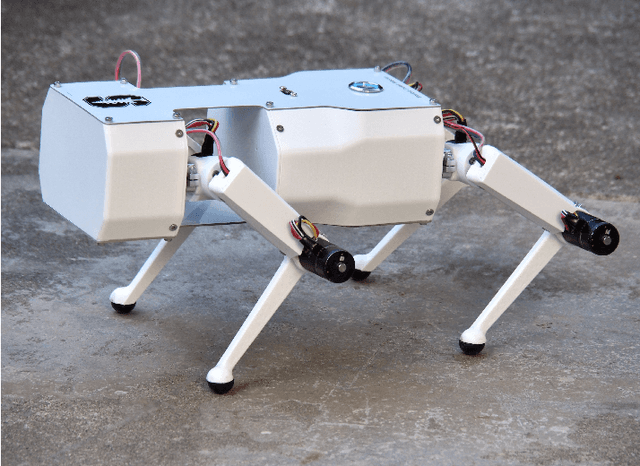
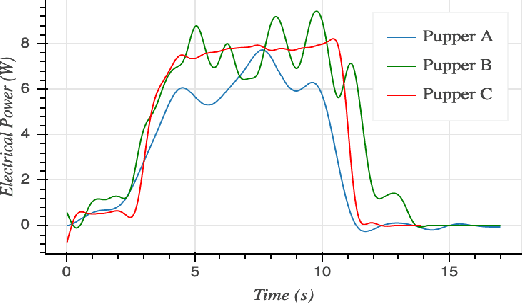
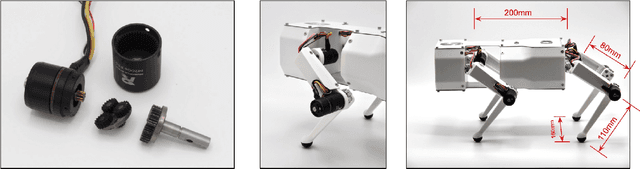

We present Stanford Pupper, an easily-replicated open source quadruped robot designed specifically as a benchmark platform for legged robotics research. The robot features torque-controllable brushless motors with high specific power that enable testing of impedance and torque-based machine learning and optimization control approaches. Pupper can be built from the ground up in under 8 hours for a total cost under $2000, with all components either easily purchased or 3D printed. To rigorously compare control approaches, we introduce two benchmarks, Sprint and Scramble with a leader board maintained by Stanford Student Robotics. These benchmarks test high-speed dynamic locomotion capability, and robustness to unstructured terrain. We provide a reference controller with dynamic, omnidirectional gaits that serves as a baseline for comparison. Reproducibility is demonstrated across multiple institutions with robots made independently. All material is available at https://stanfordstudentrobotics.org/quadruped-benchmark.
Stanford Doggo: An Open-Source, Quasi-Direct-Drive Quadruped
May 10, 2019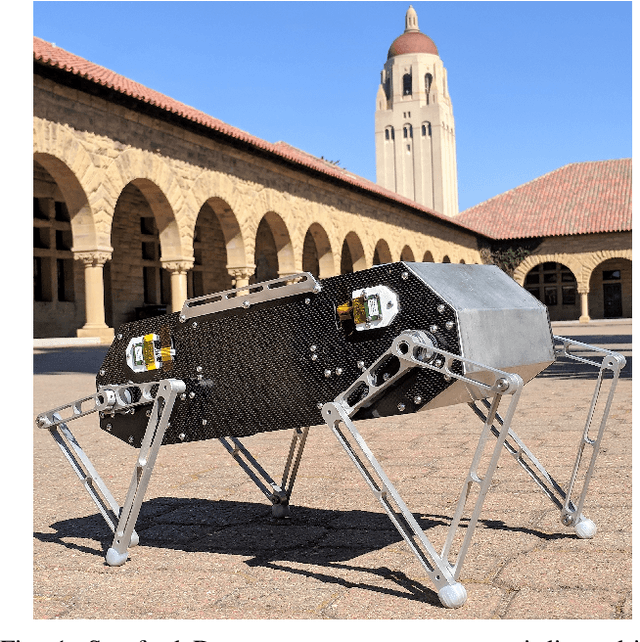



This paper presents Stanford Doggo, a quasi-direct-drive quadruped capable of dynamic locomotion. This robot matches or exceeds common performance metrics of state-of-the-art legged robots. In terms of vertical jumping agility, a measure of average vertical speed, Stanford Doggo matches the best performing animal and surpasses the previous best robot by 22%. An overall design architecture is presented with focus on our quasi-direct-drive design methodology. The hardware and software to replicate this robot is open-source, requires only hand tools for manufacturing and assembly, and costs less than $3000.