 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Debugging Deep Reinforcement Learning Programs with RLExplorer
Oct 06, 2024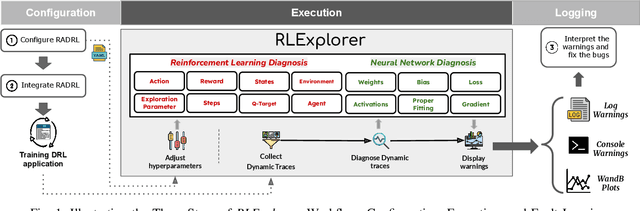
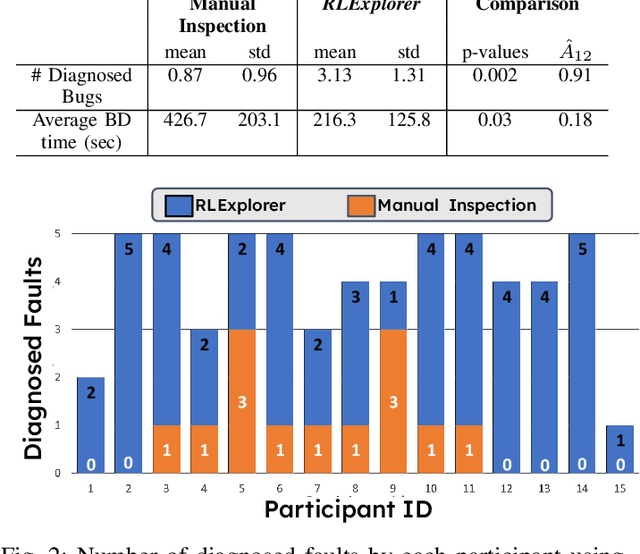
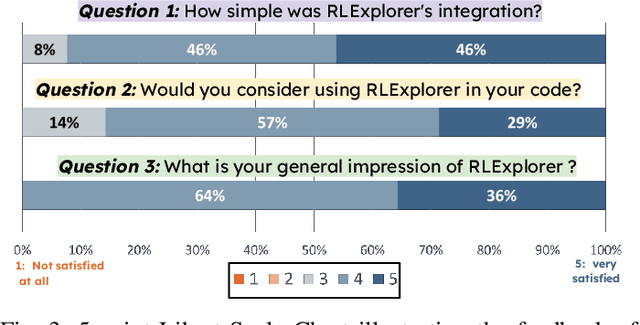
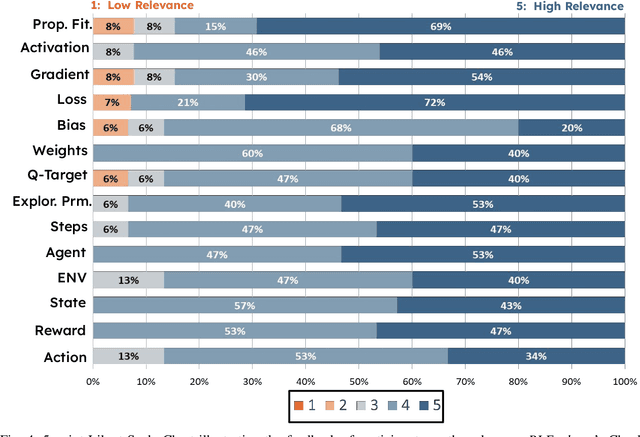
Deep reinforcement learning (DRL) has shown success in diverse domains such as robotics, computer games, and recommendation systems. However, like any other software system, DRL-based software systems are susceptible to faults that pose unique challenges for debugging and diagnosing. These faults often result in unexpected behavior without explicit failures and error messages, making debugging difficult and time-consuming. Therefore, automating the monitoring and diagnosis of DRL systems is crucial to alleviate the burden on developers. In this paper, we propose RLExplorer, the first fault diagnosis approach for DRL-based software systems. RLExplorer automatically monitors training traces and runs diagnosis routines based on properties of the DRL learning dynamics to detect the occurrence of DRL-specific faults. It then logs the results of these diagnoses as warnings that cover theoretical concepts, recommended practices, and potential solutions to the identified faults. We conducted two sets of evaluations to assess RLExplorer. Our first evaluation of faulty DRL samples from Stack Overflow revealed that our approach can effectively diagnose real faults in 83% of the cases. Our second evaluation of RLExplorer with 15 DRL experts/developers showed that (1) RLExplorer could identify 3.6 times more defects than manual debugging and (2) RLExplorer is easily integrated into DRL applications.
Intelligent Switching for Reset-Free RL
May 02, 2024In the real world, the strong episode resetting mechanisms that are needed to train agents in simulation are unavailable. The \textit{resetting} assumption limits the potential of reinforcement learning in the real world, as providing resets to an agent usually requires the creation of additional handcrafted mechanisms or human interventions. Recent work aims to train agents (\textit{forward}) with learned resets by constructing a second (\textit{backward}) agent that returns the forward agent to the initial state. We find that the termination and timing of the transitions between these two agents are crucial for algorithm success. With this in mind, we create a new algorithm, Reset Free RL with Intelligently Switching Controller (RISC) which intelligently switches between the two agents based on the agent's confidence in achieving its current goal. Our new method achieves state-of-the-art performance on several challenging environments for reset-free RL.
An Empirical Investigation of the Role of Pre-training in Lifelong Learning
Dec 16, 2021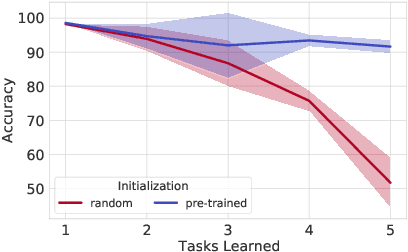
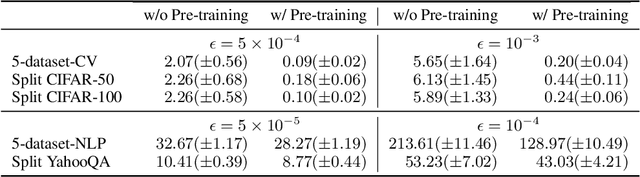
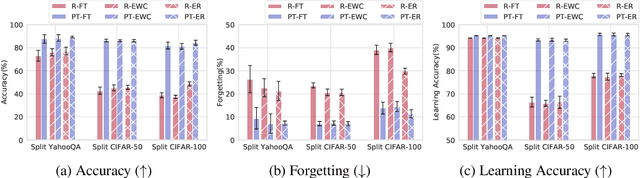
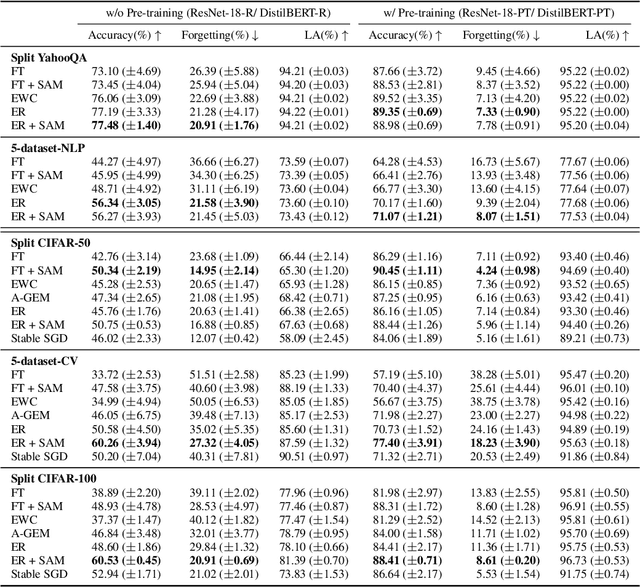
The lifelong learning paradigm in machine learning is an attractive alternative to the more prominent isolated learning scheme not only due to its resemblance to biological learning, but also its potential to reduce energy waste by obviating excessive model re-training. A key challenge to this paradigm is the phenomenon of catastrophic forgetting. With the increasing popularity and success of pre-trained models in machine learning, we pose the question: What role does pre-training play in lifelong learning, specifically with respect to catastrophic forgetting? We investigate existing methods in the context of large, pre-trained models and evaluate their performance on a variety of text and image classification tasks, including a large-scale study using a novel dataset of 15 diverse NLP tasks. Across all settings, we observe that generic pre-training implicitly alleviates the effects of catastrophic forgetting when learning multiple tasks sequentially compared to randomly initialized models. We then further investigate why pre-training alleviates forgetting in this setting. We study this phenomenon by analyzing the loss landscape, finding that pre-trained weights appear to ease forgetting by leading to wider minima. Based on this insight, we propose jointly optimizing for current task loss and loss basin sharpness in order to explicitly encourage wider basins during sequential fine-tuning. We show that this optimization approach leads to performance comparable to the state-of-the-art in task-sequential continual learning across multiple settings, without retaining a memory that scales in size with the number of tasks.
Disentangling 3D Prototypical Networks For Few-Shot Concept Learning
Nov 06, 2020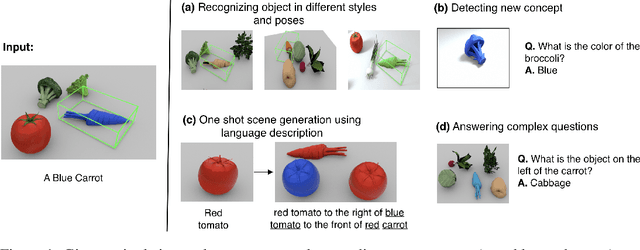
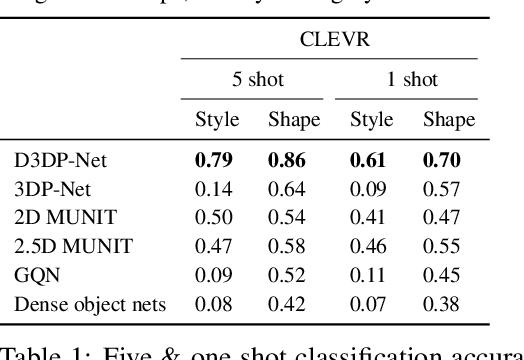
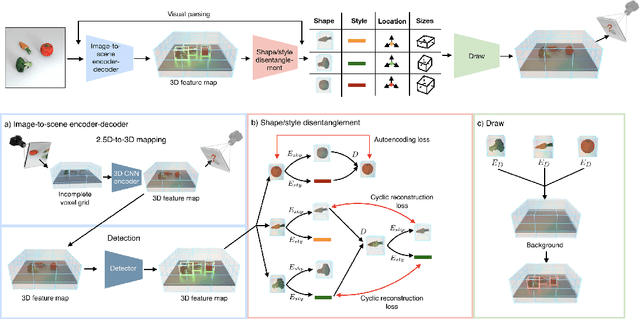
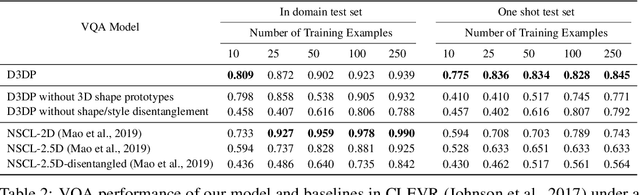
We present neural architectures that disentangle RGB-D images into objects' shapes and styles and a map of the background scene, and explore their applications for few-shot 3D object detection and few-shot concept classification. Our networks incorporate architectural biases that reflect the image formation process, 3D geometry of the world scene, and shape-style interplay. They are trained end-to-end self-supervised by predicting views in static scenes, alongside a small number of 3D object boxes. Objects and scenes are represented in terms of 3D feature grids in the bottleneck of the network. We show that the proposed 3D neural representations are compositional: they can generate novel 3D scene feature maps by mixing object shapes and styles, resizing and adding the resulting object 3D feature maps over background scene feature maps. We show that classifiers for object categories, color, materials, and spatial relationships trained over the disentangled 3D feature sub-spaces generalize better with dramatically fewer examples than the current state-of-the-art, and enable a visual question answering system that uses them as its modules to generalize one-shot to novel objects in the scene.
Towards modular and programmable architecture search
Sep 30, 2019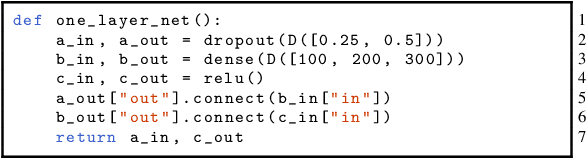
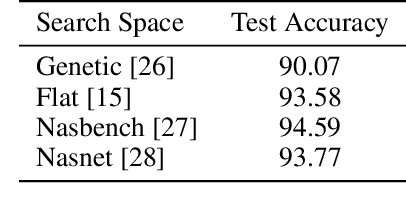
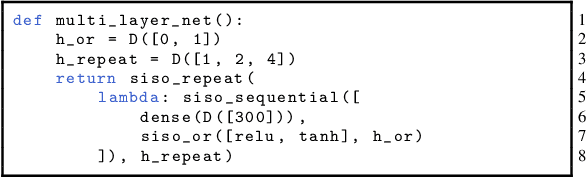
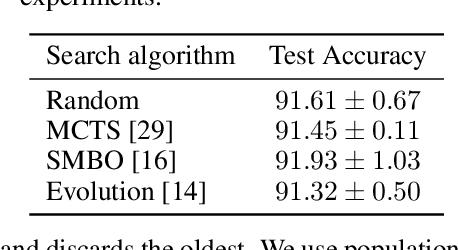
Neural architecture search methods are able to find high performance deep learning architectures with minimal effort from an expert. However, current systems focus on specific use-cases (e.g. convolutional image classifiers and recurrent language models), making them unsuitable for general use-cases that an expert might wish to write. Hyperparameter optimization systems are general-purpose but lack the constructs needed for easy application to architecture search. In this work, we propose a formal language for encoding search spaces over general computational graphs. The language constructs allow us to write modular, composable, and reusable search space encodings and to reason about search space design. We use our language to encode search spaces from the architecture search literature. The language allows us to decouple the implementations of the search space and the search algorithm, allowing us to expose search spaces to search algorithms through a consistent interface. Our experiments show the ease with which we can experiment with different combinations of search spaces and search algorithms without having to implement each combination from scratch. We release an implementation of our language with this paper.