 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh and Low Resolution Tradeoffs in Roadside Multimodal Sensing
Oct 02, 2024



Designing roadside sensing for intelligent transportation applications requires balancing cost and performance,especially when choosing between high and low-resolution sensors. The tradeoff is challenging due to sensor heterogeneity,where different sensors produce unique data modalities due to varying physical principles. High-resolution LiDAR offers detailed point cloud, while 4D millimeter-wave radar, despite providing sparser data, delivers velocity information useful for distinguishing objects based on movement patterns. To assess whether reductions in spatial resolution can be compensated by the informational richness of sensors, particularly in recognizing both vehicles and vulnerable road users (VRUs), we propose Residual Fusion Net (ResFusionNet) to fuse multimodal data for 3D object detection. This enables a quantifiable tradeoff between spatial resolution and information richness across different modalities. Furthermore, we introduce a sensor placement algorithm utilizing probabilistic modeling to manage uncertainties in sensor visibility influenced by environmental or human-related factors. Through simulation-assisted ex-ante evaluation on a real-world testbed, our findings show marked marginal gains in detecting VRUs--an average of 16.7% for pedestrians and 11% for cyclists--when merging velocity-encoded radar with LiDAR, compared to LiDAR only configurations. Additionally, experimental results from 300 runs reveal a maximum loss of 11.5% and a average of 5.25% in sensor coverage due to uncertainty factors. These findings underscore the potential of using low spatial resolution but information-rich sensors to enhance detection capabilities for vulnerable road users while highlighting the necessity of thoroughly evaluating sensor modality heterogeneity, traffic participant diversity, and operational uncertainties when making sensor tradeoffs in practical applications.
Model-free Learning of Corridor Clearance: A Near-term Deployment Perspective
Dec 16, 2023



An emerging public health application of connected and automated vehicle (CAV) technologies is to reduce response times of emergency medical service (EMS) by indirectly coordinating traffic. Therefore, in this work we study the CAV-assisted corridor clearance for EMS vehicles from a short term deployment perspective. Existing research on this topic often overlooks the impact of EMS vehicle disruptions on regular traffic, assumes 100% CAV penetration, relies on real-time traffic signal timing data and queue lengths at intersections, and makes various assumptions about traffic settings when deriving optimal model-based CAV control strategies. However, these assumptions pose significant challenges for near-term deployment and limit the real-world applicability of such methods. To overcome these challenges and enhance real-world applicability in near-term, we propose a model-free approach employing deep reinforcement learning (DRL) for designing CAV control strategies, showing its reduced overhead in designing and greater scalability and performance compared to model-based methods. Our qualitative analysis highlights the complexities of designing scalable EMS corridor clearance controllers for diverse traffic settings in which DRL controller provides ease of design compared to the model-based methods. In numerical evaluations, the model-free DRL controller outperforms the model-based counterpart by improving traffic flow and even improving EMS travel times in scenarios when a single CAV is present. Across 19 considered settings, the learned DRL controller excels by 25% in reducing the travel time in six instances, achieving an average improvement of 9%. These findings underscore the potential and promise of model-free DRL strategies in advancing EMS response and traffic flow coordination, with a focus on practical near-term deployment.
RF-Enhanced Road Infrastructure for Intelligent Transportation
Nov 01, 2023



The EPC GEN 2 communication protocol for Ultra-high frequency Radio Frequency Identification (RFID) has offered a promising avenue for advancing the intelligence of transportation infrastructure. With the capability of linking vehicles to RFID readers to crowdsource information from RFID tags on road infrastructures, the RF-enhanced road infrastructure (REI) can potentially transform data acquisition for urban transportation. Despite its potential, the broader adoption of RFID technologies in building intelligent roads has been limited by a deficiency in understanding how the GEN 2 protocol impacts system performance under different transportation settings. This paper fills this knowledge gap by presenting the system architecture and detailing the design challenges associated with REI. Comprehensive real-world experiments are conducted to assess REI's effectiveness across various urban contexts. The results yield crucial insights into the optimal design of on-vehicle RFID readers and on-road RFID tags, considering the constraints imposed by vehicle dynamics, road geometries, and tag placements. With the optimized designs of encoding schemes for reader-tag communication and on-vehicle antennas, REI is able to fulfill the requirements of traffic sign inventory management and environmental monitoring while falling short of catering to the demand for high-speed navigation. In particular, the Miller 2 encoding scheme strikes the best balance between reading performance (e.g., throughput) and noise tolerance for the multipath effect. Additionally, we show that the on-vehicle antenna should be oriented to maximize the available time for reading on-road tags, although it may reduce the received power by the tags in the forward link.
SEIP: Simulation-based Design and Evaluation of Infrastructure-based Collective Perception
May 29, 2023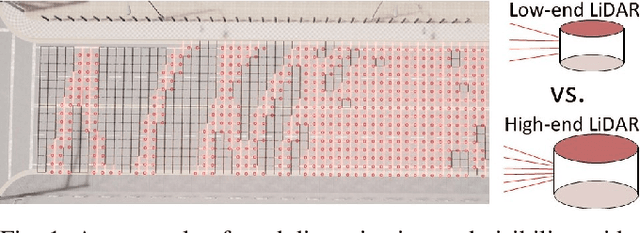
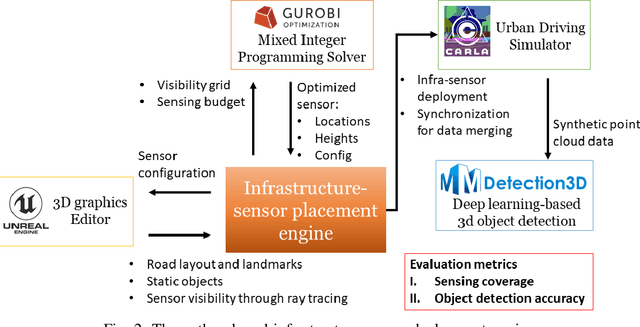
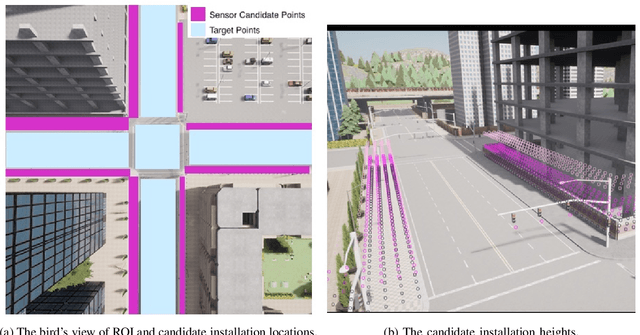
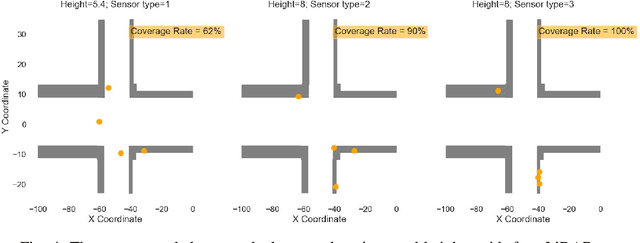
Infrastructure-based collective perception, which entails the real-time sharing and merging of sensing data from different roadside sensors for object detection, has shown promise in preventing occlusions for traffic safety and efficiency. However, its adoption has been hindered by the lack of guidance for roadside sensor placement and high costs for ex-post evaluation. For infrastructure projects with limited budgets, the ex-ante evaluation for optimizing the configurations and placements of infrastructure sensors is crucial to minimize occlusion risks at a low cost. This paper presents algorithms and simulation tools to support the ex-ante evaluation of the cost-performance tradeoff in infrastructure sensor deployment for collective perception. More specifically, the deployment of infrastructure sensors is framed as an integer programming problem that can be efficiently solved in polynomial time, achieving near-optimal results with the use of certain heuristic algorithms. The solutions provide guidance on deciding sensor locations, installation heights, and configurations to achieve the balance between procurement cost, physical constraints for installation, and sensing coverage. Additionally, we implement the proposed algorithms in a simulation engine. This allows us to evaluate the effectiveness of each sensor deployment solution through the lens of object detection. The application of the proposed methods was illustrated through a case study on traffic monitoring by using infrastructure LiDARs. Preliminary findings indicate that when working with a tight sensing budget, it is possible that the incremental benefit derived from integrating additional low-resolution LiDARs could surpass that of incorporating more high-resolution ones. The results reinforce the necessity of investigating the cost-performance tradeoff.
The Impact of Task Underspecification in Evaluating Deep Reinforcement Learning
Oct 16, 2022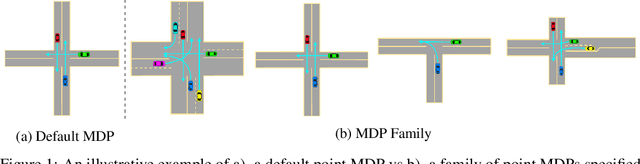
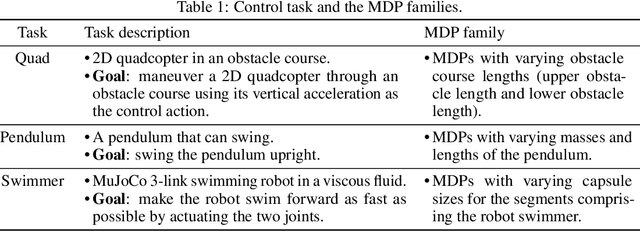
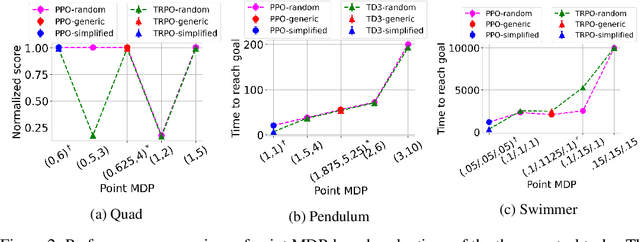
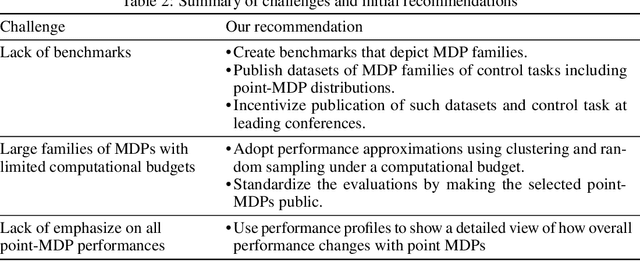
Evaluations of Deep Reinforcement Learning (DRL) methods are an integral part of scientific progress of the field. Beyond designing DRL methods for general intelligence, designing task-specific methods is becoming increasingly prominent for real-world applications. In these settings, the standard evaluation practice involves using a few instances of Markov Decision Processes (MDPs) to represent the task. However, many tasks induce a large family of MDPs owing to variations in the underlying environment, particularly in real-world contexts. For example, in traffic signal control, variations may stem from intersection geometries and traffic flow levels. The select MDP instances may thus inadvertently cause overfitting, lacking the statistical power to draw conclusions about the method's true performance across the family. In this article, we augment DRL evaluations to consider parameterized families of MDPs. We show that in comparison to evaluating DRL methods on select MDP instances, evaluating the MDP family often yields a substantially different relative ranking of methods, casting doubt on what methods should be considered state-of-the-art. We validate this phenomenon in standard control benchmarks and the real-world application of traffic signal control. At the same time, we show that accurately evaluating on an MDP family is nontrivial. Overall, this work identifies new challenges for empirical rigor in reinforcement learning, especially as the outcomes of DRL trickle into downstream decision-making.
The Braess Paradox in Dynamic Traffic
Mar 07, 2022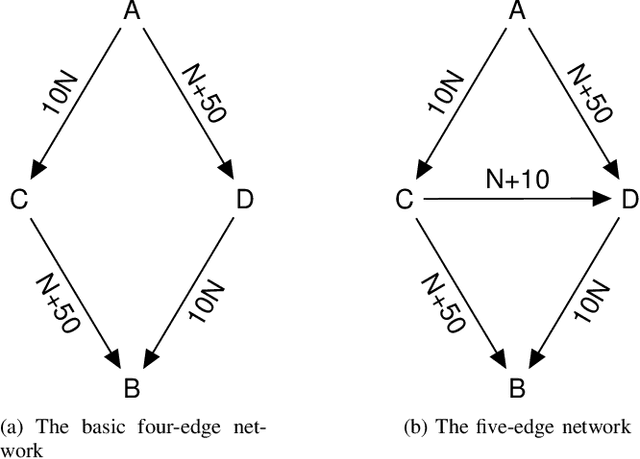
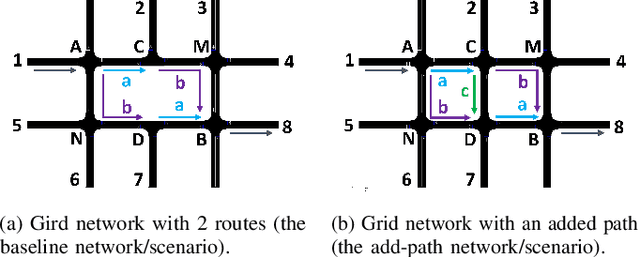
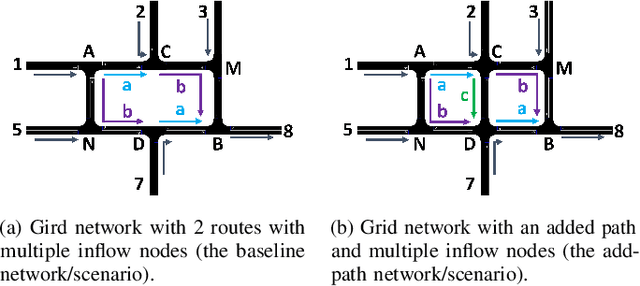
The Braess's Paradox (BP) is the observation that adding one or more roads to the existing road network will counter-intuitively increase traffic congestion and slow down the overall traffic flow. Previously, the existence of the BP is modeled using the static traffic assignment model, which solves for the user equilibrium subject to network flow conservation to find the equilibrium state and distributes all vehicles instantaneously. Such approach neglects the dynamic nature of real-world traffic, including vehicle behaviors and the interaction between vehicles and the infrastructure. As such, this article proposes a dynamic traffic network model and empirically validates the existence of the BP under dynamic traffic. In particular, we use microsimulation environment to study the impacts of an added path on a grid network. We explore how the network flow, vehicle travel time, and network capacity respond, as well as when the BP will occur.