 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNoise-Aware Generative Microscopic Traffic Simulation
Aug 10, 2025Accurately modeling individual vehicle behavior in microscopic traffic simulation remains a key challenge in intelligent transportation systems, as it requires vehicles to realistically generate and respond to complex traffic phenomena such as phantom traffic jams. While traditional human driver simulation models offer computational tractability, they do so by abstracting away the very complexity that defines human driving. On the other hand, recent advances in infrastructure-mounted camera-based roadway sensing have enabled the extraction of vehicle trajectory data, presenting an opportunity to shift toward generative, agent-based models. Yet, a major bottleneck remains: most existing datasets are either overly sanitized or lack standardization, failing to reflect the noisy, imperfect nature of real-world sensing. Unlike data from vehicle-mounted sensors-which can mitigate sensing artifacts like occlusion through overlapping fields of view and sensor fusion-infrastructure-based sensors surface a messier, more practical view of challenges that traffic engineers encounter. To this end, we present the I-24 MOTION Scenario Dataset (I24-MSD)-a standardized, curated dataset designed to preserve a realistic level of sensor imperfection, embracing these errors as part of the learning problem rather than an obstacle to overcome purely from preprocessing. Drawing from noise-aware learning strategies in computer vision, we further adapt existing generative models in the autonomous driving community for I24-MSD with noise-aware loss functions. Our results show that such models not only outperform traditional baselines in realism but also benefit from explicitly engaging with, rather than suppressing, data imperfection. We view I24-MSD as a stepping stone toward a new generation of microscopic traffic simulation that embraces the real-world challenges and is better aligned with practical needs.
NeuralMOVES: A lightweight and microscopic vehicle emission estimation model based on reverse engineering and surrogate learning
Feb 06, 2025



The transportation sector significantly contributes to greenhouse gas emissions, necessitating accurate emission models to guide mitigation strategies. Despite its field validation and certification, the industry-standard Motor Vehicle Emission Simulator (MOVES) faces challenges related to complexity in usage, high computational demands, and its unsuitability for microscopic real-time applications. To address these limitations, we present NeuralMOVES, a comprehensive suite of high-performance, lightweight surrogate models for vehicle CO2 emissions. Developed based on reverse engineering and Neural Networks, NeuralMOVES achieves a remarkable 6.013% Mean Average Percentage Error relative to MOVES across extensive tests spanning over two million scenarios with diverse trajectories and the factors regarding environments and vehicles. NeuralMOVES is only 2.4 MB, largely condensing the original MOVES and the reverse engineered MOVES into a compact representation, while maintaining high accuracy. Therefore, NeuralMOVES significantly enhances accessibility while maintaining the accuracy of MOVES, simplifying CO2 evaluation for transportation analyses and enabling real-time, microscopic applications across diverse scenarios without reliance on complex software or extensive computational resources. Moreover, this paper provides, for the first time, a framework for reverse engineering industrial-grade software tailored specifically to transportation scenarios, going beyond MOVES. The surrogate models are available at https://github.com/edgar-rs/neuralMOVES.
Mitigating Metropolitan Carbon Emissions with Dynamic Eco-driving at Scale
Aug 10, 2024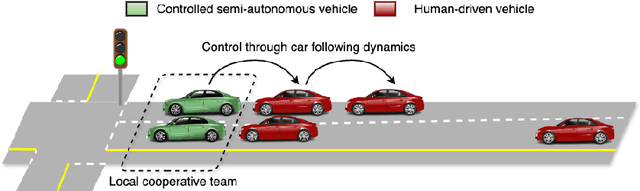
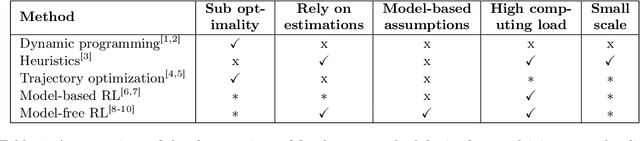
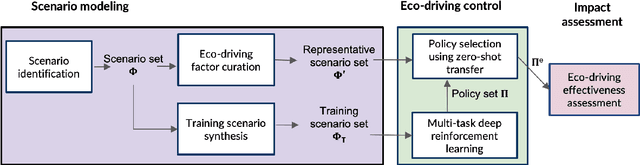
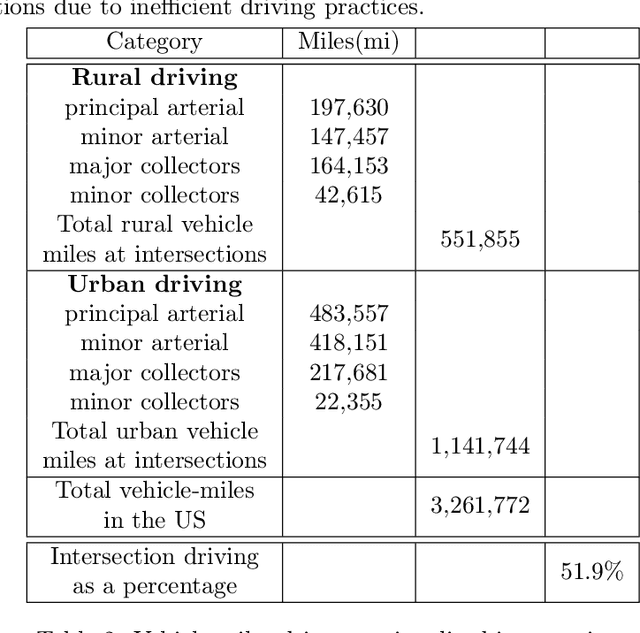
The sheer scale and diversity of transportation make it a formidable sector to decarbonize. Here, we consider an emerging opportunity to reduce carbon emissions: the growing adoption of semi-autonomous vehicles, which can be programmed to mitigate stop-and-go traffic through intelligent speed commands and, thus, reduce emissions. But would such dynamic eco-driving move the needle on climate change? A comprehensive impact analysis has been out of reach due to the vast array of traffic scenarios and the complexity of vehicle emissions. We address this challenge with large-scale scenario modeling efforts and by using multi-task deep reinforcement learning with a carefully designed network decomposition strategy. We perform an in-depth prospective impact assessment of dynamic eco-driving at 6,011 signalized intersections across three major US metropolitan cities, simulating a million traffic scenarios. Overall, we find that vehicle trajectories optimized for emissions can cut city-wide intersection carbon emissions by 11-22%, without harming throughput or safety, and with reasonable assumptions, equivalent to the national emissions of Israel and Nigeria, respectively. We find that 10% eco-driving adoption yields 25%-50% of the total reduction, and nearly 70% of the benefits come from 20% of intersections, suggesting near-term implementation pathways. However, the composition of this high-impact subset of intersections varies considerably across different adoption levels, with minimal overlap, calling for careful strategic planning for eco-driving deployments. Moreover, the impact of eco-driving, when considered jointly with projections of vehicle electrification and hybrid vehicle adoption remains significant. More broadly, this work paves the way for large-scale analysis of traffic externalities, such as time, safety, and air quality, and the potential impact of solution strategies.
The Impact of Task Underspecification in Evaluating Deep Reinforcement Learning
Oct 16, 2022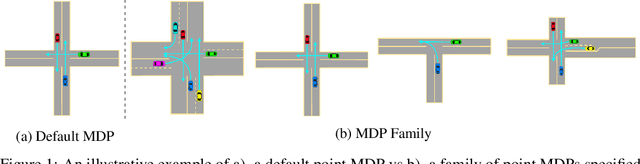
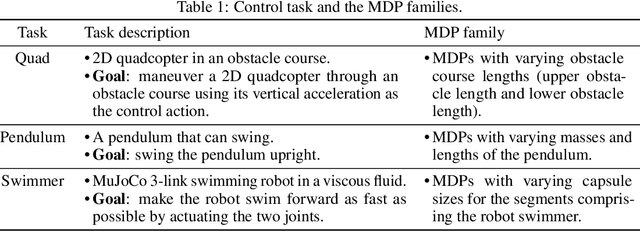
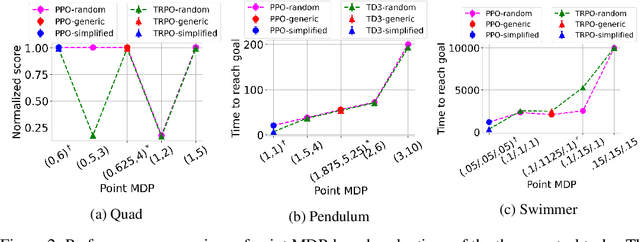
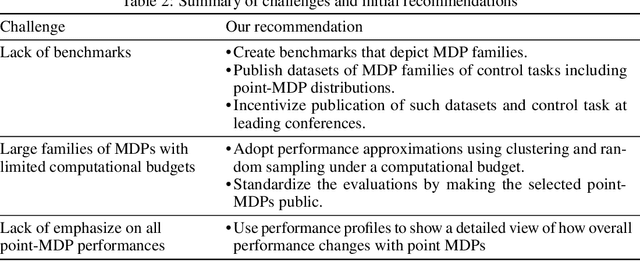
Evaluations of Deep Reinforcement Learning (DRL) methods are an integral part of scientific progress of the field. Beyond designing DRL methods for general intelligence, designing task-specific methods is becoming increasingly prominent for real-world applications. In these settings, the standard evaluation practice involves using a few instances of Markov Decision Processes (MDPs) to represent the task. However, many tasks induce a large family of MDPs owing to variations in the underlying environment, particularly in real-world contexts. For example, in traffic signal control, variations may stem from intersection geometries and traffic flow levels. The select MDP instances may thus inadvertently cause overfitting, lacking the statistical power to draw conclusions about the method's true performance across the family. In this article, we augment DRL evaluations to consider parameterized families of MDPs. We show that in comparison to evaluating DRL methods on select MDP instances, evaluating the MDP family often yields a substantially different relative ranking of methods, casting doubt on what methods should be considered state-of-the-art. We validate this phenomenon in standard control benchmarks and the real-world application of traffic signal control. At the same time, we show that accurately evaluating on an MDP family is nontrivial. Overall, this work identifies new challenges for empirical rigor in reinforcement learning, especially as the outcomes of DRL trickle into downstream decision-making.