 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMitigating Metropolitan Carbon Emissions with Dynamic Eco-driving at Scale
Aug 10, 2024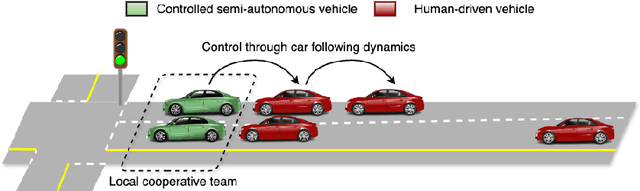
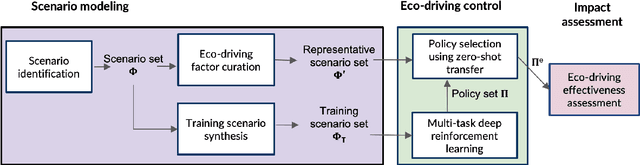
The sheer scale and diversity of transportation make it a formidable sector to decarbonize. Here, we consider an emerging opportunity to reduce carbon emissions: the growing adoption of semi-autonomous vehicles, which can be programmed to mitigate stop-and-go traffic through intelligent speed commands and, thus, reduce emissions. But would such dynamic eco-driving move the needle on climate change? A comprehensive impact analysis has been out of reach due to the vast array of traffic scenarios and the complexity of vehicle emissions. We address this challenge with large-scale scenario modeling efforts and by using multi-task deep reinforcement learning with a carefully designed network decomposition strategy. We perform an in-depth prospective impact assessment of dynamic eco-driving at 6,011 signalized intersections across three major US metropolitan cities, simulating a million traffic scenarios. Overall, we find that vehicle trajectories optimized for emissions can cut city-wide intersection carbon emissions by 11-22%, without harming throughput or safety, and with reasonable assumptions, equivalent to the national emissions of Israel and Nigeria, respectively. We find that 10% eco-driving adoption yields 25%-50% of the total reduction, and nearly 70% of the benefits come from 20% of intersections, suggesting near-term implementation pathways. However, the composition of this high-impact subset of intersections varies considerably across different adoption levels, with minimal overlap, calling for careful strategic planning for eco-driving deployments. Moreover, the impact of eco-driving, when considered jointly with projections of vehicle electrification and hybrid vehicle adoption remains significant. More broadly, this work paves the way for large-scale analysis of traffic externalities, such as time, safety, and air quality, and the potential impact of solution strategies.
Robust Fuzzy corner detector
May 21, 2014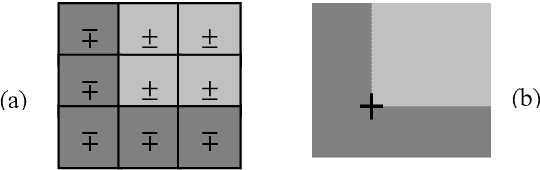
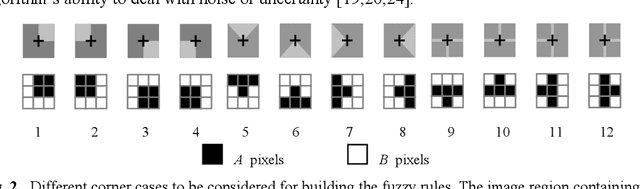
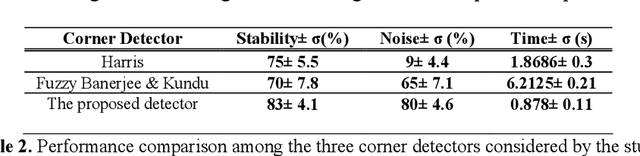
Reliable corner detection is an important task in determining the shape of different regions within an image. Real-life image data are always imprecise due to inherent uncertainties that may arise from the imaging process such as defocusing, illumination changes, noise, etc. Therefore, the localization and detection of corners has become a difficult task to accomplish under such imperfect situations. On the other hand, Fuzzy systems are well known for their efficient handling of impreciseness and incompleteness, which make them inherently suitable for modelling corner properties by means of a rule-based fuzzy system. The paper presents a corner detection algorithm which employs such fuzzy reasoning. The robustness of the proposed algorithm is compared to well-known conventional corner detectors and its performance is also tested over a number of benchmark images to illustrate the efficiency of the algorithm under uncertainty.
* 15 Pages