 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStatistical Tree-based Population Seeding for Rolling Horizon EAs in General Video Game Playing
Aug 30, 2020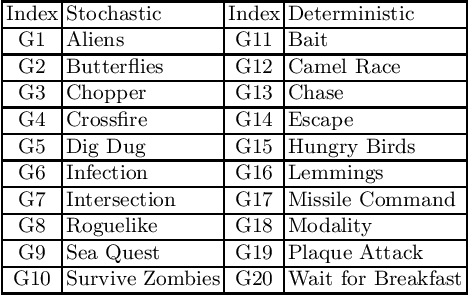
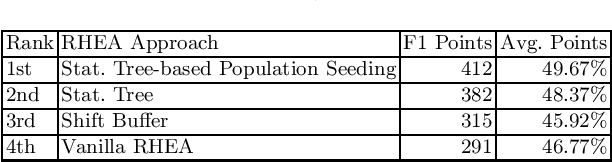


Multiple Artificial Intelligence (AI) methods have been proposed over recent years to create controllers to play multiple video games of different nature and complexity without revealing the specific mechanics of each of these games to the AI methods. In recent years, Evolutionary Algorithms (EAs) employing rolling horizon mechanisms have achieved extraordinary results in these type of problems. However, some limitations are present in Rolling Horizon EAs making it a grand challenge of AI. These limitations include the wasteful mechanism of creating a population and evolving it over a fraction of a second to propose an action to be executed by the game agent. Another limitation is to use a scalar value (fitness value) to direct evolutionary search instead of accounting for a mechanism that informs us how a particular agent behaves during the rolling horizon simulation. In this work, we address both of these issues. We introduce the use of a statistical tree that tackles the latter limitation. Furthermore, we tackle the former limitation by employing a mechanism that allows us to seed part of the population using Monte Carlo Tree Search, a method that has dominated multiple General Video Game AI competitions. We show how the proposed novel mechanism, called Statistical Tree-based Population Seeding, achieves better results compared to vanilla Rolling Horizon EAs in a set of 20 games, including 10 stochastic and 10 deterministic games.
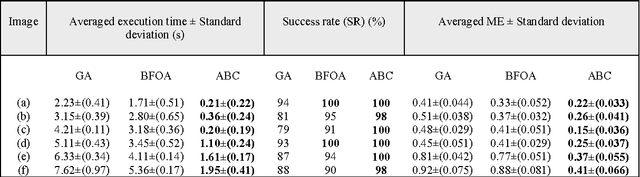
Block matching algorithm for motion estimation based on Artificial Bee Colony (ABC)
Jun 30, 2014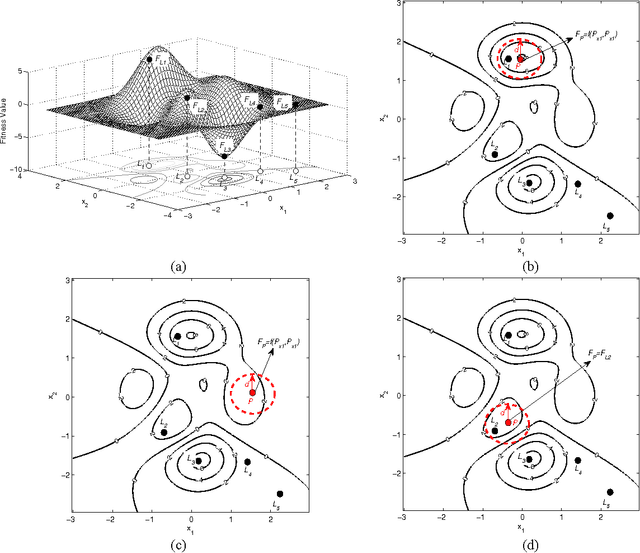
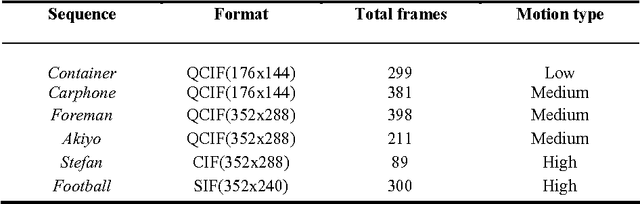
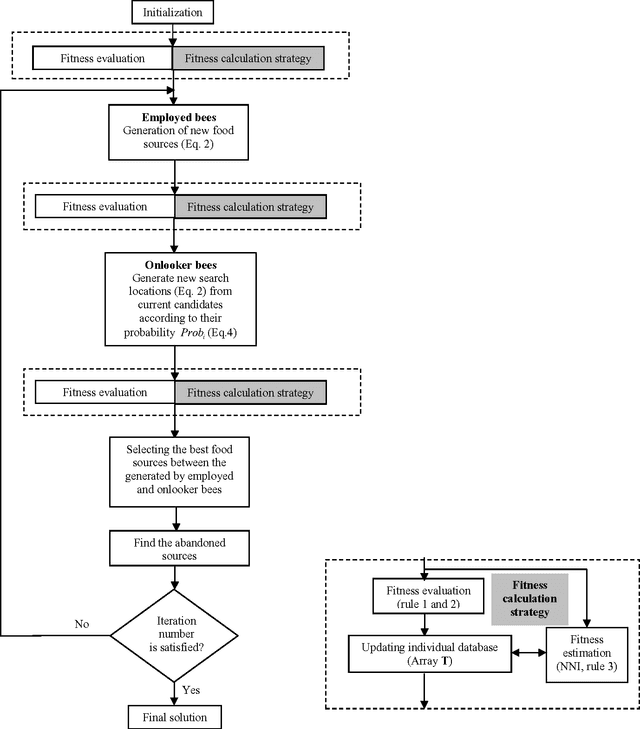
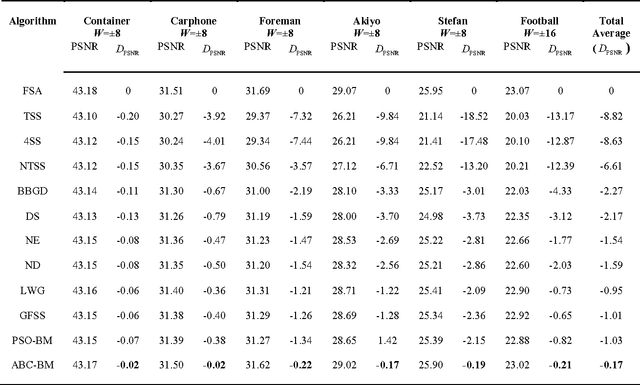
Block matching (BM) motion estimation plays a very important role in video coding. In a BM approach, image frames in a video sequence are divided into blocks. For each block in the current frame, the best matching block is identified inside a region of the previous frame, aiming to minimize the sum of absolute differences (SAD). Unfortunately, the SAD evaluation is computationally expensive and represents the most consuming operation in the BM process. Therefore, BM motion estimation can be approached as an optimization problem, where the goal is to find the best matching block within a search space. The simplest available BM method is the full search algorithm (FSA) which finds the most accurate motion vector through an exhaustive computation of SAD values for all elements of the search window. Recently, several fast BM algorithms have been proposed to reduce the number of SAD operations by calculating only a fixed subset of search locations at the price of poor accuracy. In this paper, a new algorithm based on Artificial Bee Colony (ABC) optimization is proposed to reduce the number of search locations in the BM process. In our algorithm, the computation of search locations is drastically reduced by considering a fitness calculation strategy which indicates when it is feasible to calculate or only estimate new search locations. Since the proposed algorithm does not consider any fixed search pattern or any other movement assumption as most of other BM approaches do, a high probability for finding the true minimum (accurate motion vector) is expected. Conducted simulations show that the proposed method achieves the best balance over other fast BM algorithms, in terms of both estimation accuracy and computational cost.
* 22 Pages. arXiv admin note: substantial text overlap with arXiv:1405.4721, arXiv:1406.4484
Hands-on experiments on intelligent behavior for mobile robots
Jun 30, 2014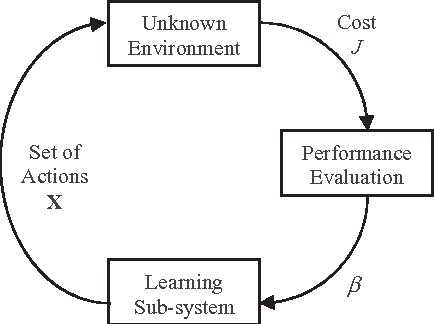
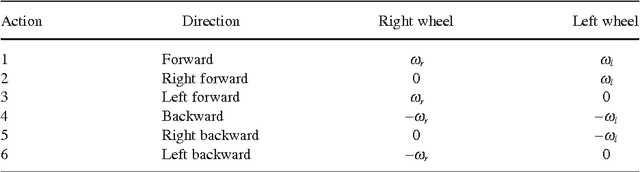
In recent years, Artificial Intelligence techniques have emerged as useful tools for solving various engineering problems that were not possible or convenient to handle by traditional methods. AI has directly influenced many areas of computer science and becomes an important part of the engineering curriculum. However, determining the important topics for a single semester AI course is a nontrivial task, given the lack of a general methodology. AI concepts commonly overlap with many other disciplines involving a wide range of subjects, including applied approaches to more formal mathematical issues. This paper presents the use of a simple robotic platform to assist the learning of basic AI concepts. The study is guided through some simple experiments using autonomous mobile robots. The central algorithm is the Learning Automata. Using LA, each robot action is applied to an environment to be evaluated by means of a fitness value. The response of the environment is used by the automata to select its next action. This procedure holds until the goal task is reached. The proposal addresses the AI study by offering in LA a unifying context to draw together several of the topics of AI and motivating the students to learn by building some hands on laboratory exercises. The presented material has been successfully tested as AI teaching aide in the University of Guadalajara robotics group as it motivates students and increases enrolment and retention while educating better computer engineers.
* 11 Pages
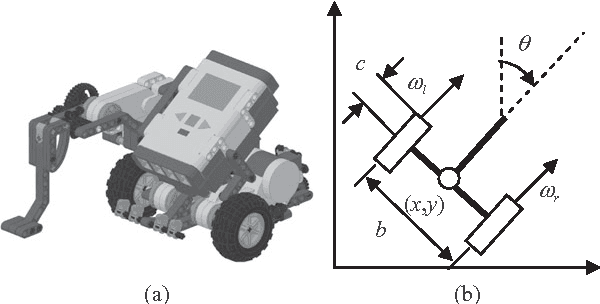
Low-cost commercial LEGO platform for mobile robotics
Jun 30, 2014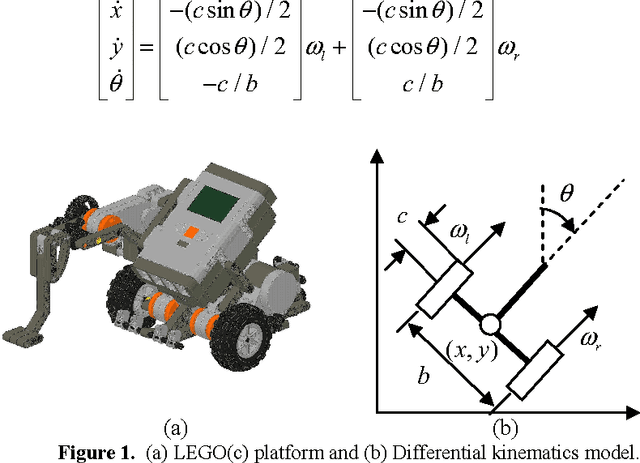
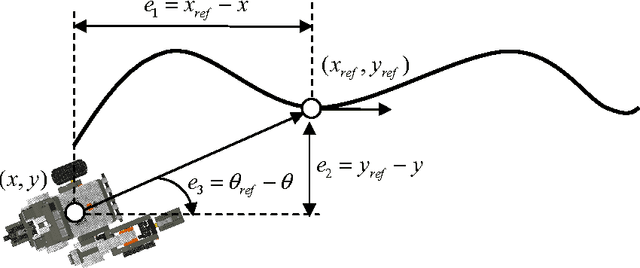
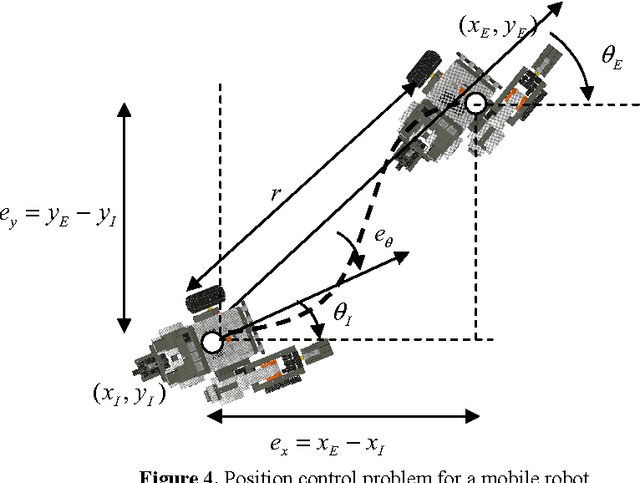
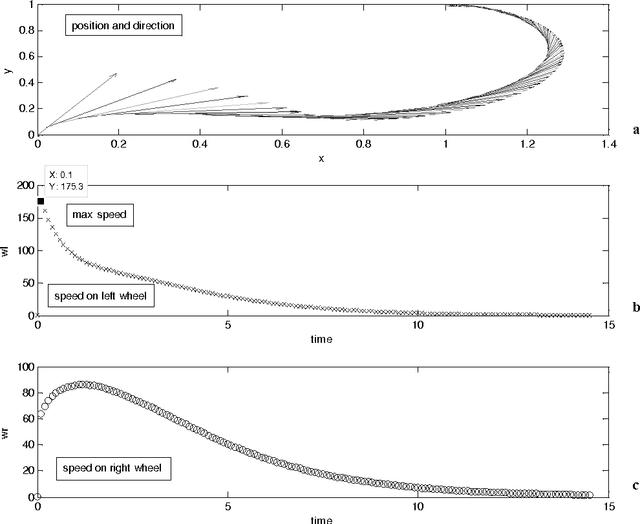
This paper shows the potential of a Lego\c{opyright} based low-cost commercial robotic platform for learning and testing prototypes in higher education and research. The overall setup aims to explain mobile robotic issues strongly related to several fields such as Mechatronics, Robotics, and Automatic Control theory. The capabilities and limitations of LEGO robots are studied within two projects. The first one involves a robotic vehicle which is able to follow several predefined paths. The second project concerns to the classical problem of position control. Algorithms and additional tools have been fully designed, applied and documented with results shown throughout the paper. The platform is found to be suitable for teaching and researching on key issues related to the aforementioned fields.
* 10 Pages
An optimization algorithm for multimodal functions inspired by collective animal behavior
Jun 30, 2014
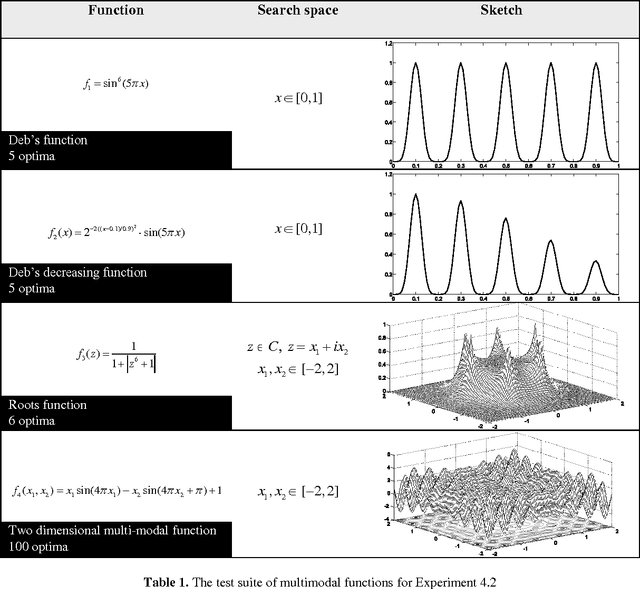

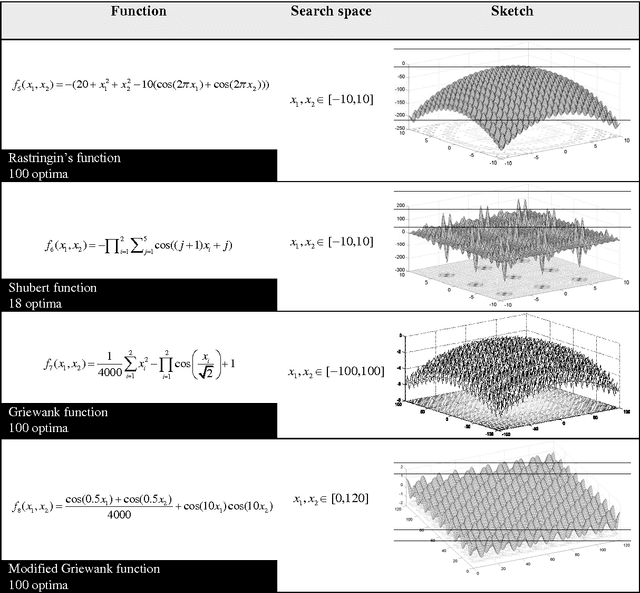
Interest in multimodal function optimization is expanding rapidly since real world optimization problems often demand locating multiple optima within a search space. This article presents a new multimodal optimization algorithm named as the Collective Animal Behavior (CAB). Animal groups, such as schools of fish, flocks of birds, swarms of locusts and herds of wildebeest, exhibit a variety of behaviors including swarming about a food source, milling around a central location or migrating over large distances in aligned groups. These collective behaviors are often advantageous to groups, allowing them to increase their harvesting efficiency to follow better migration routes, to improve their aerodynamic and to avoid predation. In the proposed algorithm, searcher agents are a group of animals which interact to each other based on the biological laws of collective motion. Experimental results demonstrate that the proposed algorithm is capable of finding global and local optima of benchmark multimodal optimization problems with a higher efficiency in comparison to other methods reported in the literature.
* 18 Pages. arXiv admin note: text overlap with arXiv:1405.5164
An improved computer vision method for detecting white blood cells
Jun 27, 2014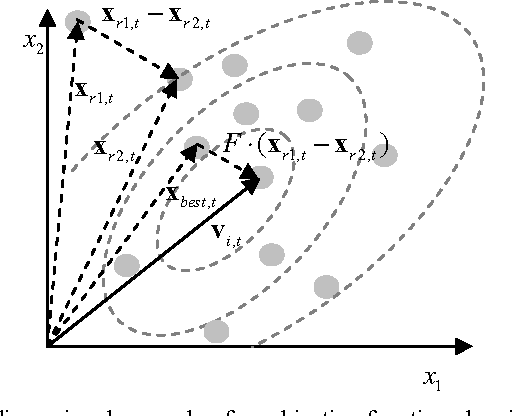

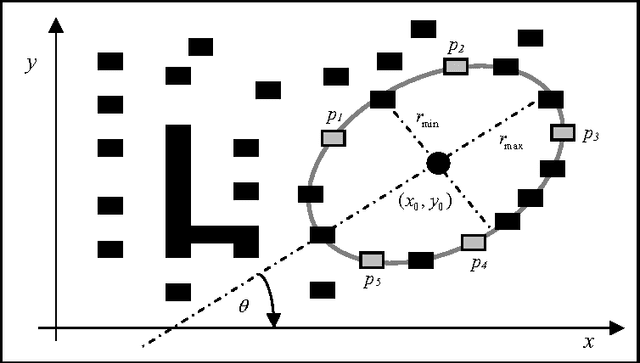
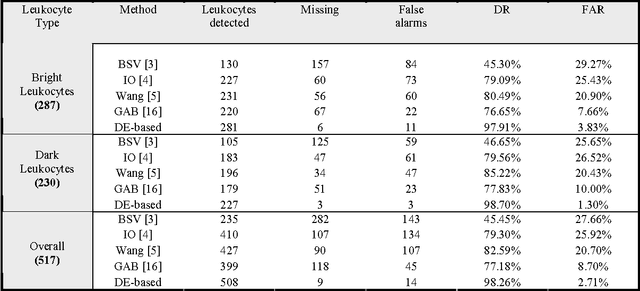
The automatic detection of White Blood Cells (WBC) still remains as an unsolved issue in medical imaging. The analysis of WBC images has engaged researchers from fields of medicine and computer vision alike. Since WBC can be approximated by an ellipsoid form, an ellipse detector algorithm may be successfully applied in order to recognize them. This paper presents an algorithm for the automatic detection of WBC embedded into complicated and cluttered smear images that considers the complete process as a multi-ellipse detection problem. The approach, based on the Differential Evolution (DE) algorithm, transforms the detection task into an optimization problem where individuals emulate candidate ellipses. An objective function evaluates if such candidate ellipses are really present in the edge image of the smear. Guided by the values of such function, the set of encoded candidate ellipses (individuals) are evolved using the DE algorithm so that they can fit into the WBC enclosed within the edge-only map of the image. Experimental results from white blood cell images with a varying range of complexity are included to validate the efficiency of the proposed technique in terms of accuracy and robustness.
* 20 Pages. arXiv admin note: text overlap with arXiv:1405.5164
Multi Circle Detection on Images Using Artificial Bee Colony (ABC) Optimization
Jun 25, 2014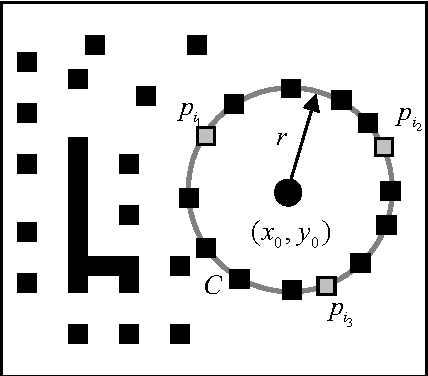

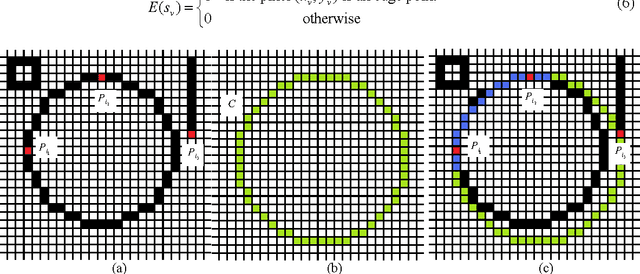
Hough transform (HT) has been the most common method for circle detection, exhibiting robustness, but adversely demanding considerable computational effort and large memory requirements. Alternative approaches include heuristic methods that employ iterative optimization procedures for detecting multiple circles. Since only one circle can be marked at each optimization cycle, multiple executions must be enforced in order to achieve multi detection. This paper presents an algorithm for automatic detection of multiple circular shapes that considers the overall process as a multi-modal optimization problem. The approach is based on the artificial bee colony (ABC) algorithm, a swarm optimization algorithm inspired by the intelligent foraging behavior of honey bees. Unlike the original ABC algorithm, the proposed approach presents the addition of a memory for discarded solutions. Such memory allows holding important information regarding other local optima which might have emerged during the optimization process. The detector uses a combination of three non-collinear edge points as parameters to determine circle candidates. A matching function (nectar- amount) determines if such circle candidates (bee-food-sources) are actually present in the image. Guided by the values of such matching functions, the set of encoded candidate circles are evolved through the ABC algorithm so that the best candidate (global optimum) can be fitted into an actual circle within the edge only image. Then, an analysis of the incorporated memory is executed in order to identify potential local optima, i.e., other circles.
* 19 Pages
A multilevel thresholding algorithm using Electromagnetism Optimization
Jun 24, 2014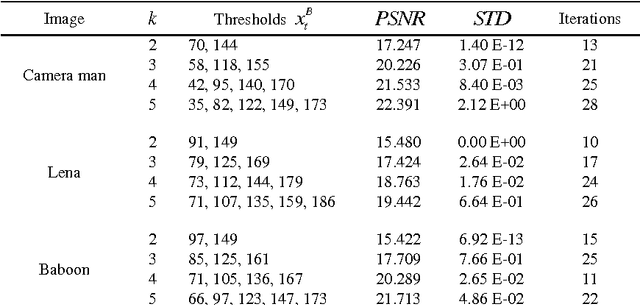
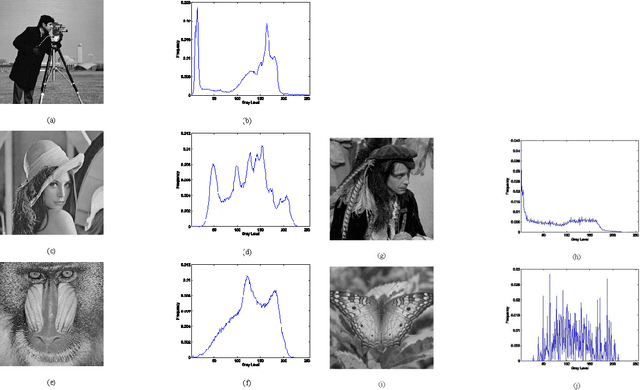
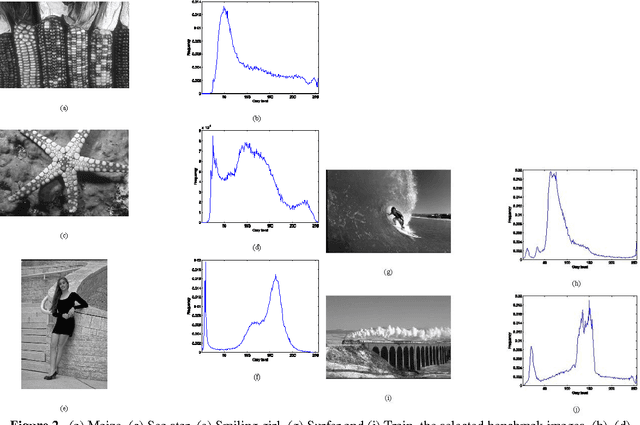
Segmentation is one of the most important tasks in image processing. It consist in classify the pixels into two or more groups depending on their intensity levels and a threshold value. The quality of the segmentation depends on the method applied to select the threshold. The use of the classical implementations for multilevel thresholding is computationally expensive since they exhaustively search the best values to optimize the objective function. Under such conditions, the use of optimization evolutionary approaches has been extended. The Electromagnetism Like algorithm (EMO) is an evolutionary method which mimics the attraction repulsion mechanism among charges to evolve the members of a population. Different to other algorithms, EMO exhibits interesting search capabilities whereas maintains a low computational overhead. In this paper, a multilevel thresholding (MT) algorithm based on the EMO is introduced. The approach combines the good search capabilities of EMO algorithm with objective functions proposed by the popular MT methods of Otsu and Kapur. The algorithm takes random samples from a feasible search space inside the image histogram. Such samples build each particle in the EMO context whereas its quality is evaluated considering the objective that is function employed by the Otsu or Kapur method. Guided by these objective values the set of candidate solutions are evolved through the EMO operators until an optimal solution is found. The approach generates a multilevel segmentation algorithm which can effectively identify the threshold values of a digital image in a reduced number of iterations. Experimental results show performance evidence of the implementation of EMO for digital image segmentation.
* The figures have been shortened in order to fulfill the submission requirements
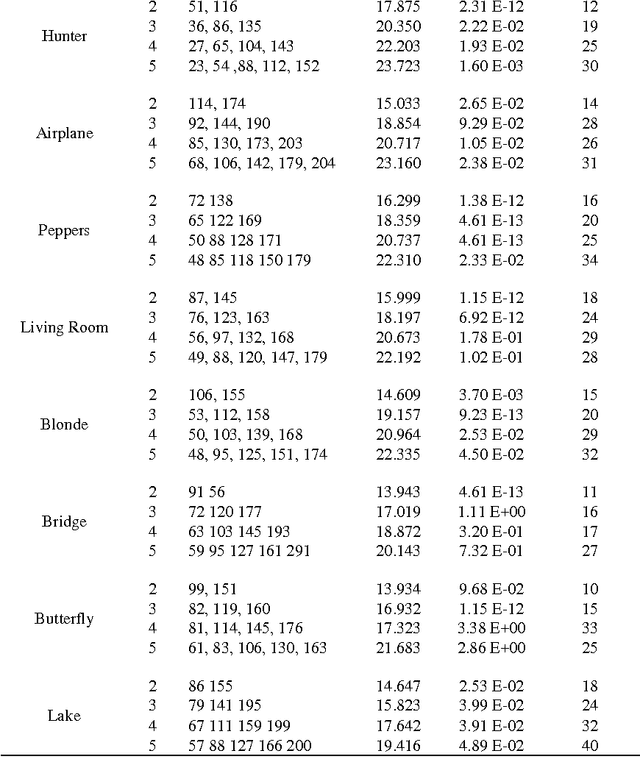
Block matching algorithm based on Harmony Search optimization for motion estimation
Jun 17, 2014
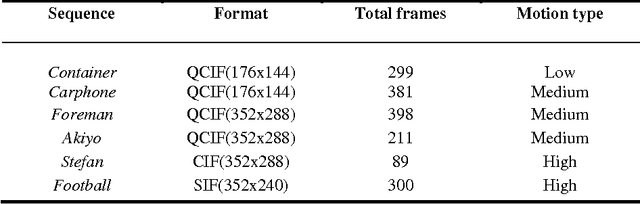

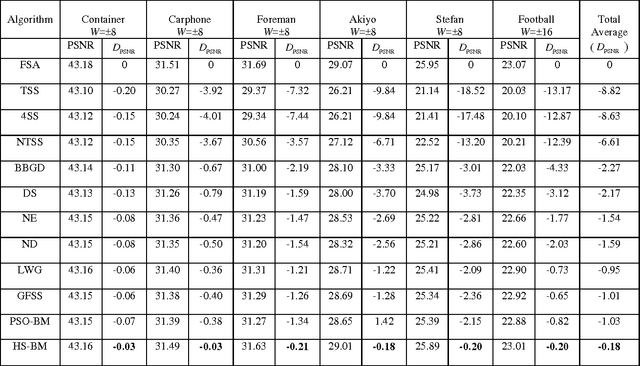
Motion estimation is one of the major problems in developing video coding applications. Among all motion estimation approaches, Block-matching (BM) algorithms are the most popular methods due to their effectiveness and simplicity for both software and hardware implementations. A BM approach assumes that the movement of pixels within a defined region of the current frame can be modeled as a translation of pixels contained in the previous frame. In this procedure, the motion vector is obtained by minimizing a certain matching metric that is produced for the current frame over a determined search window from the previous frame. Unfortunately, the evaluation of such matching measurement is computationally expensive and represents the most consuming operation in the BM process. Therefore, BM motion estimation can be viewed as an optimization problem whose goal is to find the best-matching block within a search space. The simplest available BM method is the Full Search Algorithm (FSA) which finds the most accurate motion vector through an exhaustive computation of all the elements of the search space. Recently, several fast BM algorithms have been proposed to reduce the search positions by calculating only a fixed subset of motion vectors despite lowering its accuracy. On the other hand, the Harmony Search (HS) algorithm is a population-based optimization method that is inspired by the music improvisation process in which a musician searches for harmony and continues to polish the pitches to obtain a better harmony. In this paper, a new BM algorithm that combines HS with a fitness approximation model is proposed. The approach uses motion vectors belonging to the search window as potential solutions. A fitness function evaluates the matching quality of each motion vector candidate.
* 25 Pages. arXiv admin note: substantial text overlap with arXiv:1405.4721
An Educational Fuzzy-based Control platform using LEGO Robots
Jun 13, 2014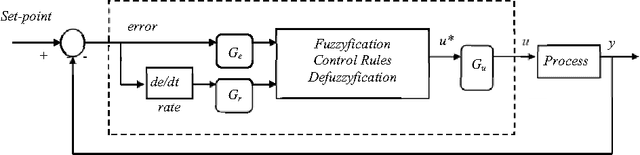
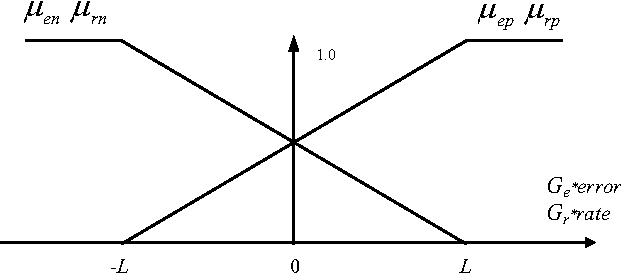
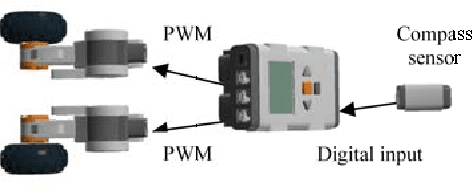
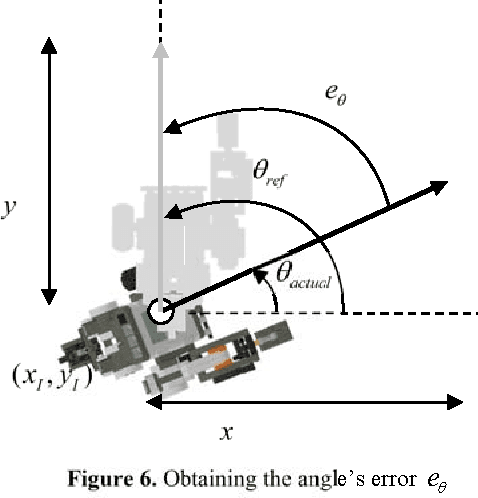
Fuzzy controllers have gained popularity in the past few decades with successful implementations in many fields that have enabled designers to control complex systems through linguistic-based rules in contrast to traditional methods. This paper presents an educational platform based on LEGO\c{opyright} NXT to assist the learning of fuzzy logic control principles at undergraduate level by providing a simple and easy-to-follow teaching setup. The proposed fuzzy control study aims to accompany students to the learning of fuzzy control fundamentals by building hands-on robotic experiments. The proposed educational platform has been successfully applied to several undergraduate courses within the Electronics Department in the University of Guadalajara. The description of robotic experiments and the evaluation of their impact in the student performance are both provided in the paper.