 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlock matching algorithm for motion estimation based on Artificial Bee Colony (ABC)
Jun 30, 2014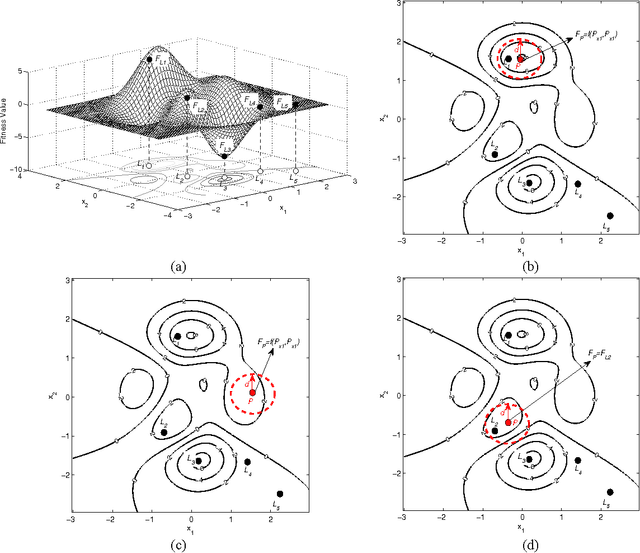
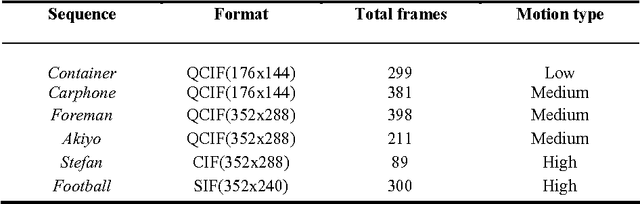
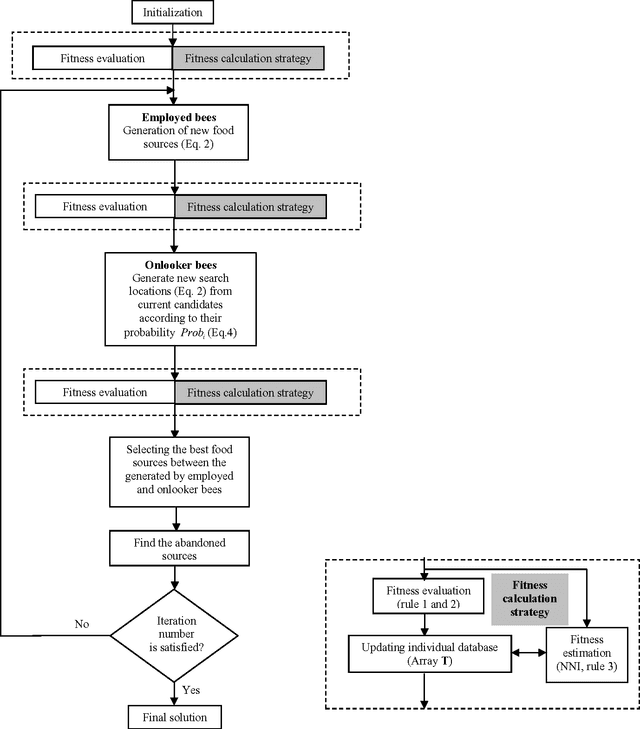
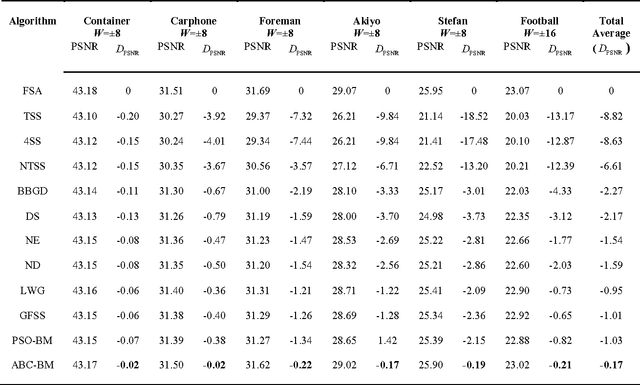
Block matching (BM) motion estimation plays a very important role in video coding. In a BM approach, image frames in a video sequence are divided into blocks. For each block in the current frame, the best matching block is identified inside a region of the previous frame, aiming to minimize the sum of absolute differences (SAD). Unfortunately, the SAD evaluation is computationally expensive and represents the most consuming operation in the BM process. Therefore, BM motion estimation can be approached as an optimization problem, where the goal is to find the best matching block within a search space. The simplest available BM method is the full search algorithm (FSA) which finds the most accurate motion vector through an exhaustive computation of SAD values for all elements of the search window. Recently, several fast BM algorithms have been proposed to reduce the number of SAD operations by calculating only a fixed subset of search locations at the price of poor accuracy. In this paper, a new algorithm based on Artificial Bee Colony (ABC) optimization is proposed to reduce the number of search locations in the BM process. In our algorithm, the computation of search locations is drastically reduced by considering a fitness calculation strategy which indicates when it is feasible to calculate or only estimate new search locations. Since the proposed algorithm does not consider any fixed search pattern or any other movement assumption as most of other BM approaches do, a high probability for finding the true minimum (accurate motion vector) is expected. Conducted simulations show that the proposed method achieves the best balance over other fast BM algorithms, in terms of both estimation accuracy and computational cost.
* 22 Pages. arXiv admin note: substantial text overlap with arXiv:1405.4721, arXiv:1406.4484
Low-cost commercial LEGO platform for mobile robotics
Jun 30, 2014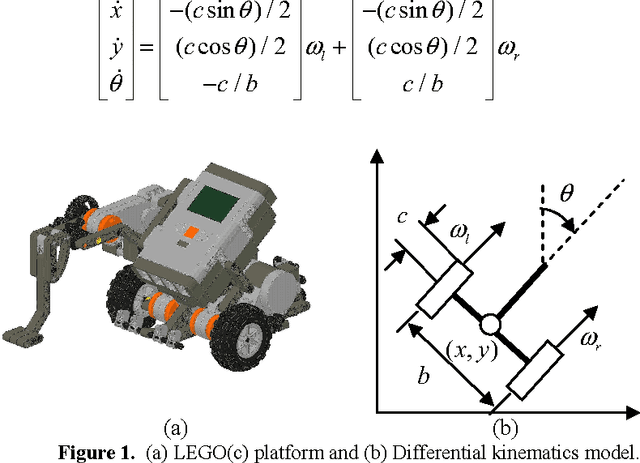
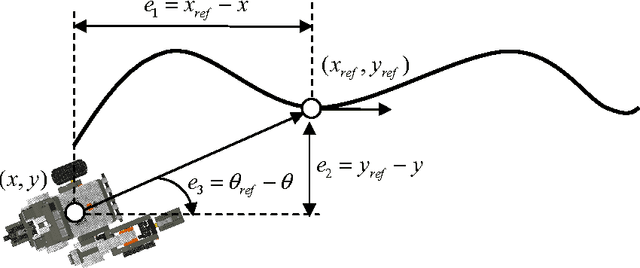
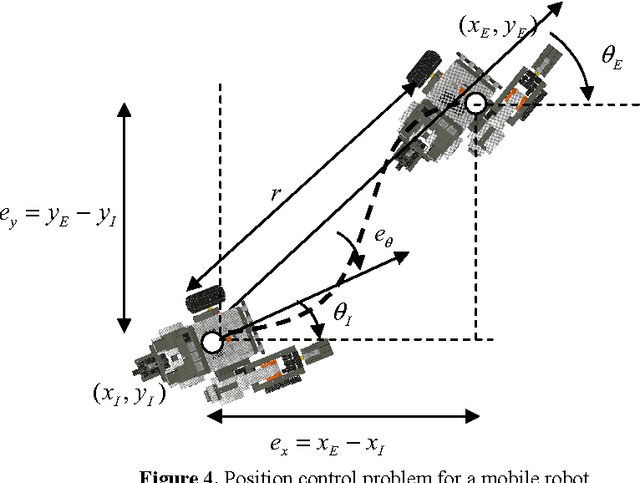
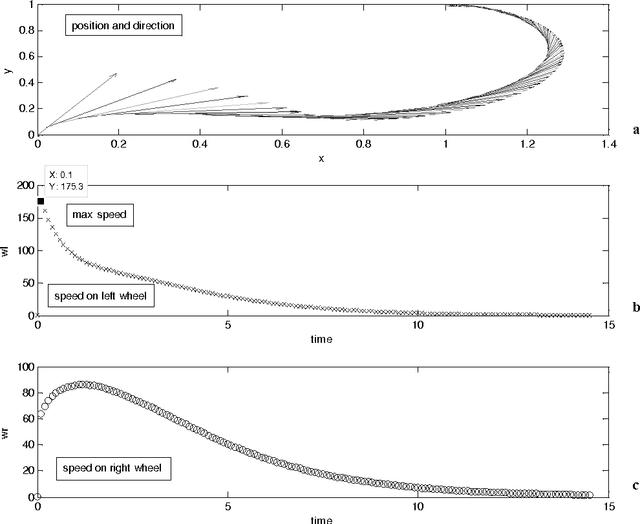
This paper shows the potential of a Lego\c{opyright} based low-cost commercial robotic platform for learning and testing prototypes in higher education and research. The overall setup aims to explain mobile robotic issues strongly related to several fields such as Mechatronics, Robotics, and Automatic Control theory. The capabilities and limitations of LEGO robots are studied within two projects. The first one involves a robotic vehicle which is able to follow several predefined paths. The second project concerns to the classical problem of position control. Algorithms and additional tools have been fully designed, applied and documented with results shown throughout the paper. The platform is found to be suitable for teaching and researching on key issues related to the aforementioned fields.
* 10 Pages
An improved computer vision method for detecting white blood cells
Jun 27, 2014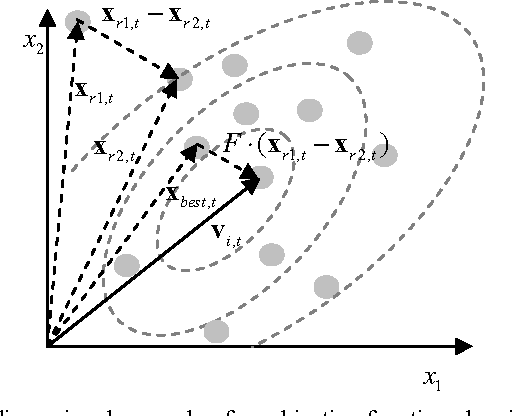

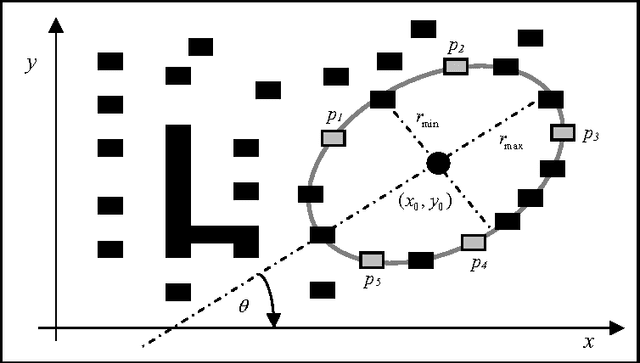
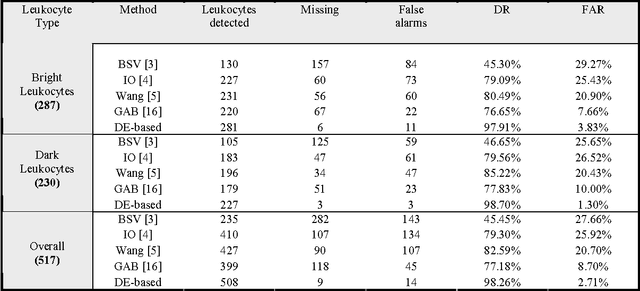
The automatic detection of White Blood Cells (WBC) still remains as an unsolved issue in medical imaging. The analysis of WBC images has engaged researchers from fields of medicine and computer vision alike. Since WBC can be approximated by an ellipsoid form, an ellipse detector algorithm may be successfully applied in order to recognize them. This paper presents an algorithm for the automatic detection of WBC embedded into complicated and cluttered smear images that considers the complete process as a multi-ellipse detection problem. The approach, based on the Differential Evolution (DE) algorithm, transforms the detection task into an optimization problem where individuals emulate candidate ellipses. An objective function evaluates if such candidate ellipses are really present in the edge image of the smear. Guided by the values of such function, the set of encoded candidate ellipses (individuals) are evolved using the DE algorithm so that they can fit into the WBC enclosed within the edge-only map of the image. Experimental results from white blood cell images with a varying range of complexity are included to validate the efficiency of the proposed technique in terms of accuracy and robustness.
* 20 Pages. arXiv admin note: text overlap with arXiv:1405.5164
A swarm optimization algorithm inspired in the behavior of the social-spider
Jun 12, 2014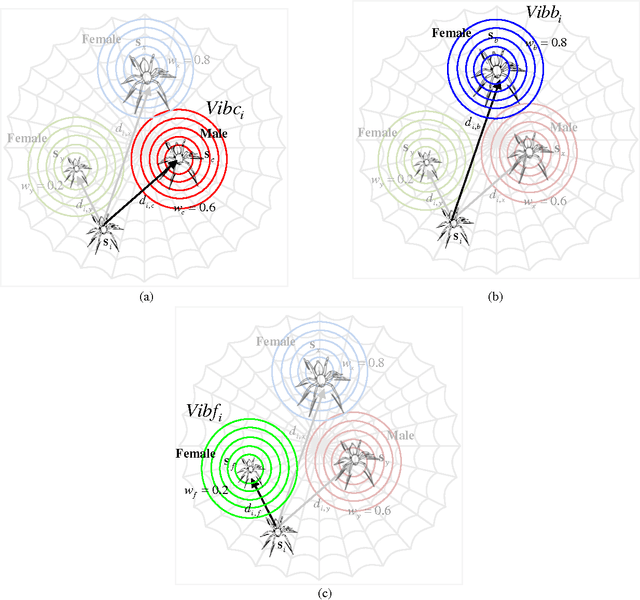
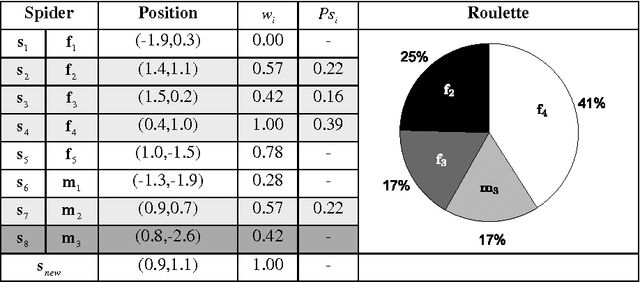
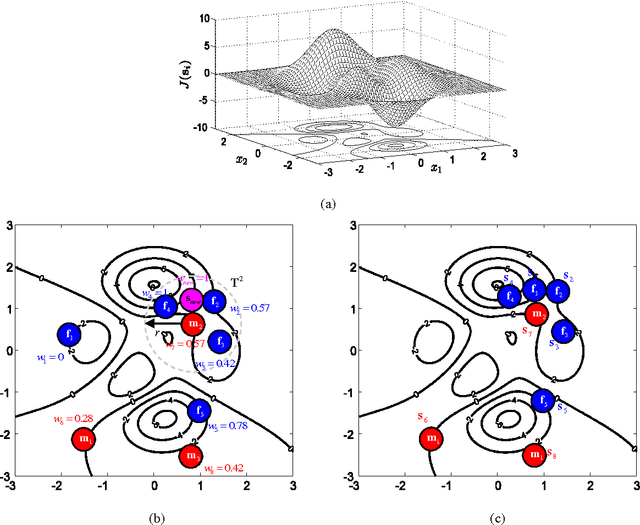

Swarm intelligence is a research field that models the collective behavior in swarms of insects or animals. Several algorithms arising from such models have been proposed to solve a wide range of complex optimization problems. In this paper, a novel swarm algorithm called the Social Spider Optimization (SSO) is proposed for solving optimization tasks. The SSO algorithm is based on the simulation of cooperative behavior of social-spiders. In the proposed algorithm, individuals emulate a group of spiders which interact to each other based on the biological laws of the cooperative colony. The algorithm considers two different search agents (spiders): males and females. Depending on gender, each individual is conducted by a set of different evolutionary operators which mimic different cooperative behaviors that are typically found in the colony. In order to illustrate the proficiency and robustness of the proposed approach, it is compared to other well-known evolutionary methods. The comparison examines several standard benchmark functions that are commonly considered within the literature of evolutionary algorithms. The outcome shows a high performance of the proposed method for searching a global optimum with several benchmark functions.
* 21 Pages
Circle detection using Discrete Differential Evolution Optimization
May 28, 2014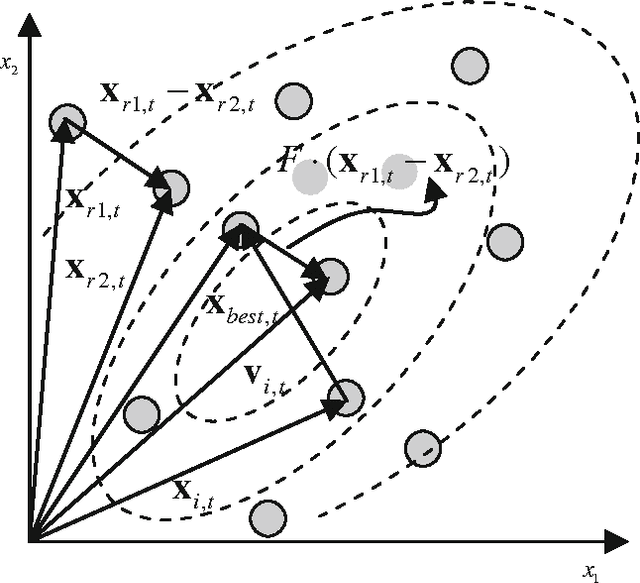
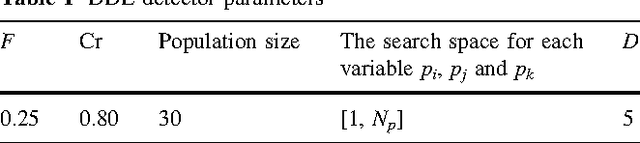
This paper introduces a circle detection method based on Differential Evolution (DE) optimization. Just as circle detection has been lately considered as a fundamental component for many computer vision algorithms, DE has evolved as a successful heuristic method for solving complex optimization problems, still keeping a simple structure and an easy implementation. It has also shown advantageous convergence properties and remarkable robustness. The detection process is considered similar to a combinational optimization problem. The algorithm uses the combination of three edge points as parameters to determine circles candidates in the scene yielding a reduction of the search space. The objective function determines if some circle candidates are actually present in the image. This paper focuses particularly on one DE-based algorithm known as the Discrete Differential Evolution (DDE), which eventually has shown better results than the original DE in particular for solving combinatorial problems. In the DDE, suitable conversion routines are incorporated into the DE, aiming to operate from integer values to real values and then getting integer values back, following the crossover operation. The final algorithm is a fast circle detector that locates circles with sub-pixel accuracy even considering complicated conditions and noisy images. Experimental results on several synthetic and natural images with varying range of complexity validate the efficiency of the proposed technique considering accuracy, speed, and robustness.
* 20 Pages. arXiv admin note: text overlap with arXiv:1405.7242
Seeking multi-thresholds for image segmentation with Learning Automata
May 28, 2014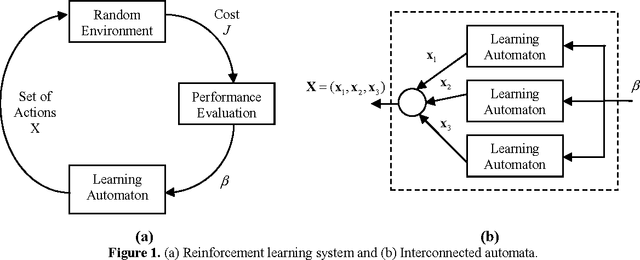
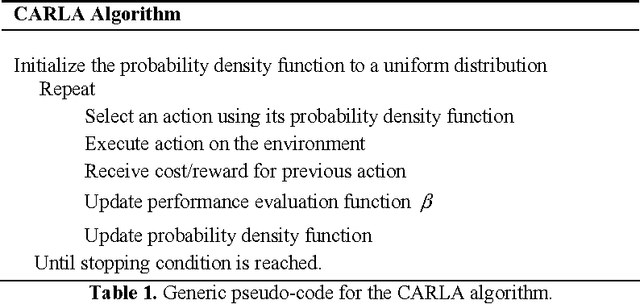
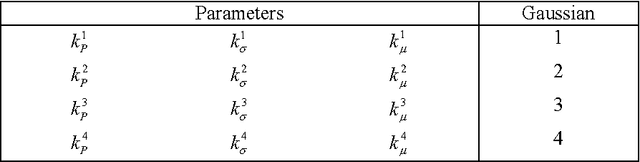
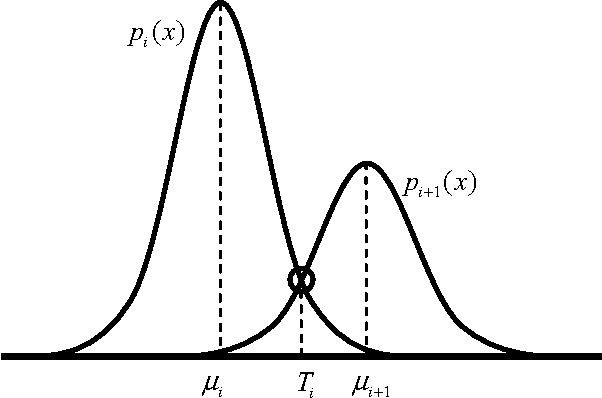
This paper explores the use of the Learning Automata (LA) algorithm to compute threshold selection for image segmentation as it is a critical preprocessing step for image analysis, pattern recognition and computer vision. LA is a heuristic method which is able to solve complex optimization problems with interesting results in parameter estimation. Despite other techniques commonly seek through the parameter map, LA explores in the probability space providing appropriate convergence properties and robustness. The segmentation task is therefore considered as an optimization problem and the LA is used to generate the image multi-threshold separation. In this approach, one 1D histogram of a given image is approximated through a Gaussian mixture model whose parameters are calculated using the LA algorithm. Each Gaussian function approximating the histogram represents a pixel class and therefore a threshold point. The method shows fast convergence avoiding the typical sensitivity to initial conditions such as the Expectation Maximization (EM) algorithm or the complex time-consuming computations commonly found in gradient methods. Experimental results demonstrate the algorithm ability to perform automatic multi-threshold selection and show interesting advantages as it is compared to other algorithms solving the same task.
* 22 Pages. arXiv admin note: text overlap with arXiv:1405.7229
Circle detection by Harmony Search Optimization
May 28, 2014
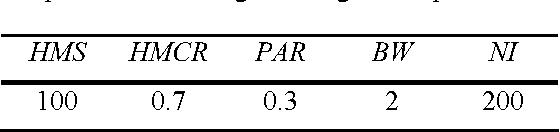

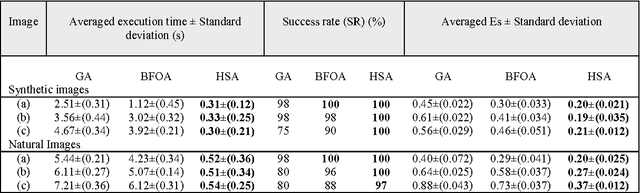
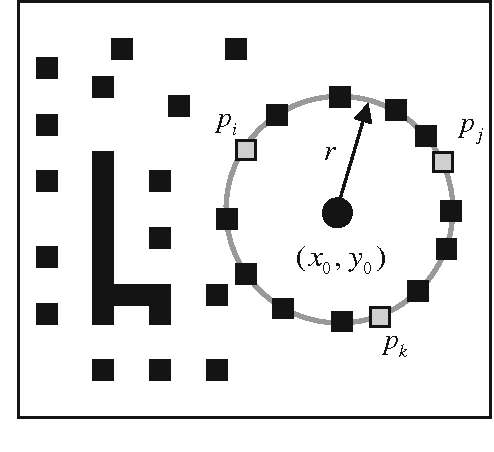
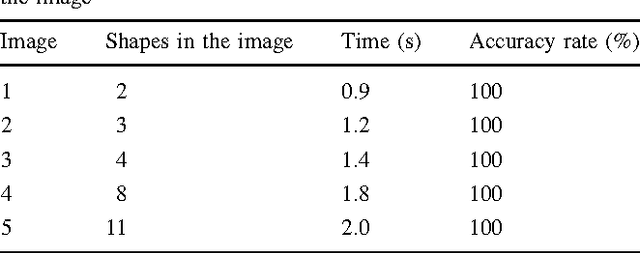
Automatic circle detection in digital images has received considerable attention over the last years in computer vision as several efforts have aimed for an optimal circle detector. This paper presents an algorithm for automatic detection of circular shapes that considers the overall process as an optimization problem. The approach is based on the Harmony Search Algorithm (HSA), a derivative free meta-heuristic optimization algorithm inspired by musicians while improvising new harmonies. The algorithm uses the encoding of three points as candidate circles (harmonies) over the edge-only image. An objective function evaluates (harmony quality) if such candidate circles are actually present in the edge image. Guided by the values of this objective function, the set of encoded candidate circles are evolved using the HSA so that they can fit to the actual circles on the edge map of the image (optimal harmony). Experimental results from several tests on synthetic and natural images with a varying complexity range have been included to validate the efficiency of the proposed technique regarding accuracy, speed and robustness.
* 18 Pages
A Multi-threshold Segmentation Approach Based on Artificial Bee Colony Optimization
May 28, 2014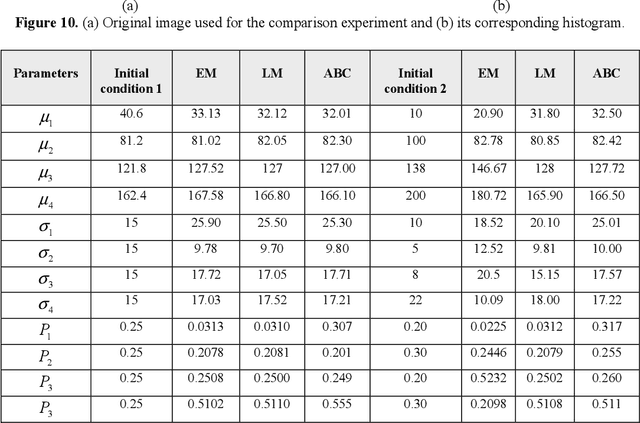
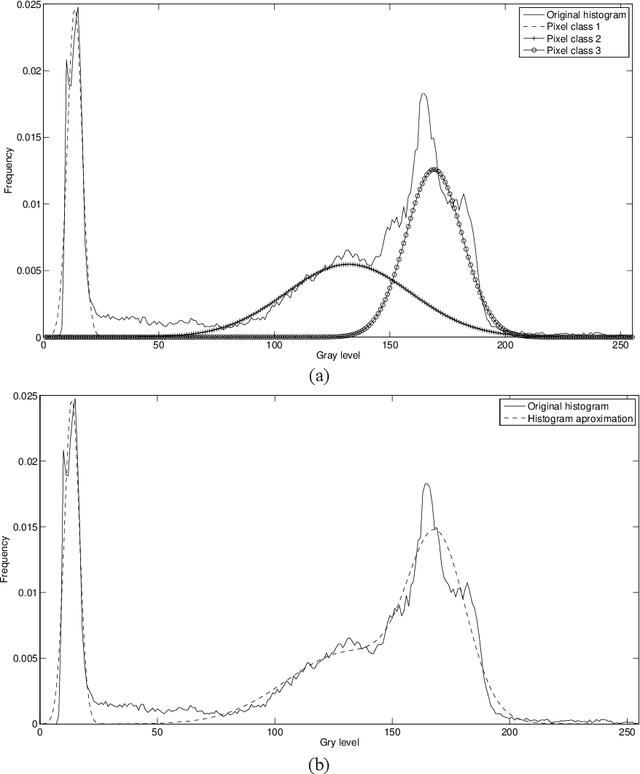
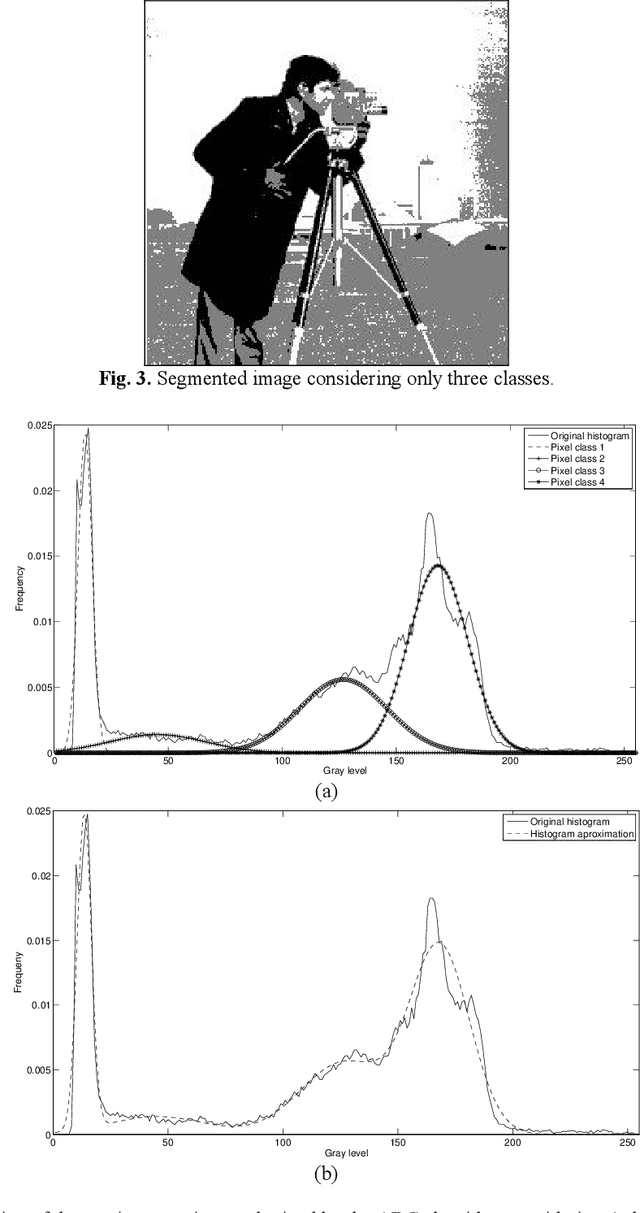
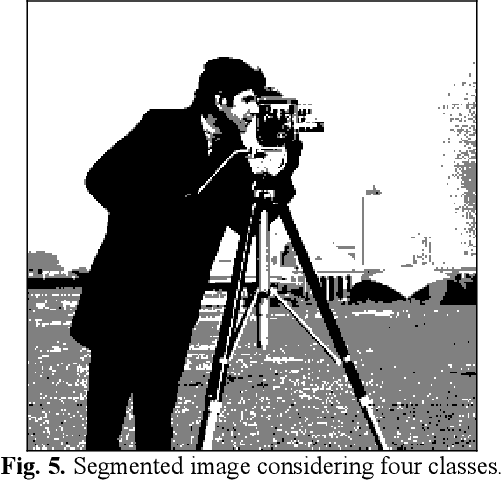
This paper explores the use of the Artificial Bee Colony (ABC) algorithm to compute threshold selection for image segmentation. ABC is a heuristic algorithm motivated by the intelligent behavior of honey-bees which has been successfully employed to solve complex optimization problems. In this approach, an image 1D histogram is approximated through a Gaussian mixture model whose parameters are calculated by the ABC algorithm. For the approximation scheme, each Gaussian function represents a pixel class and therefore a threshold. Unlike the Expectation Maximization (EM) algorithm, the ABC based method shows fast convergence and low sensitivity to initial conditions. Remarkably, it also improves complex time consuming computations commonly required by gradient-based methods. Experimental results demonstrate the algorithms ability to perform automatic multi threshold selection yet showing interesting advantages by comparison to other well known algorithms.
* 16 Pages
Polynomial trajectory algorithm for a biped robot
May 23, 2014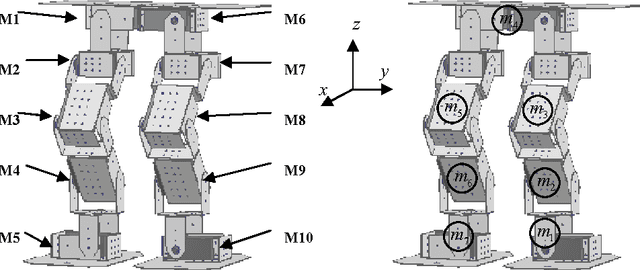
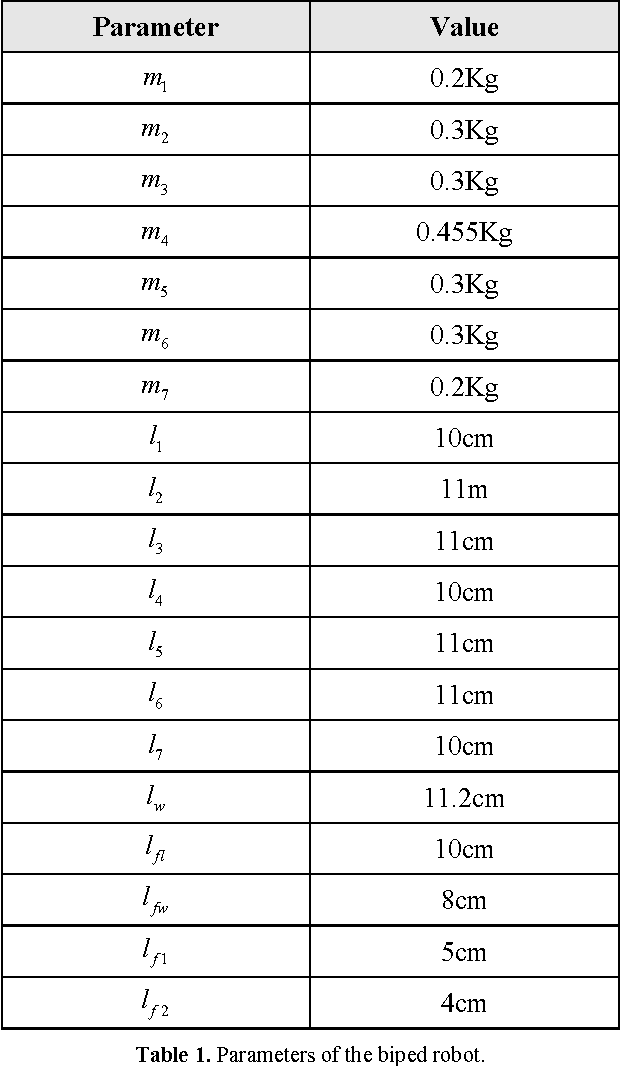
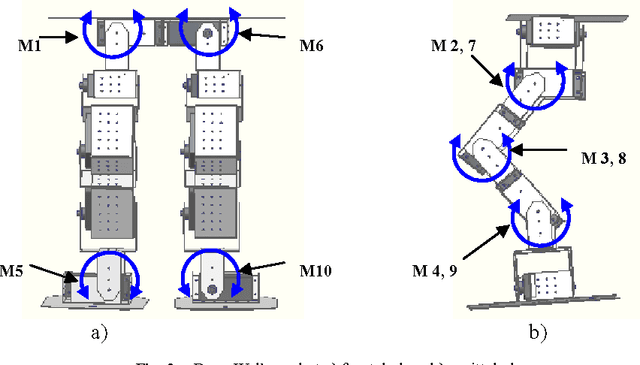
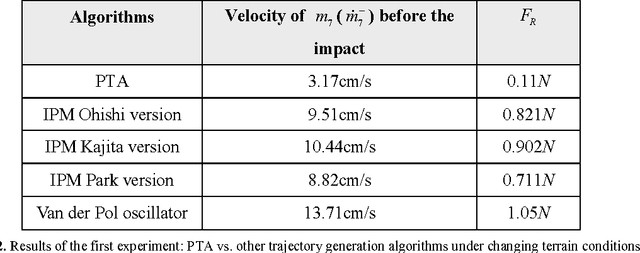
Building trajectories for biped robot walking is a complex task considering all degrees of freedom (DOFs) commonly bound within the mechanical structure. A typical problem for such robots is the instability produced by violent transitions between walking phases in particular when a swinging leg impacts the surface. Although extensive research on novel efficient walking algorithms has been conducted, falls commonly appear as the walking speed increases or as the terrain condition changes. This paper presents a polynomial trajectory generation algorithm (PTA) to implement the walking on biped robots following the cubic Hermitian polynomial interpolation between initial and final conditions. The proposed algorithm allows smooth transitions between walking phases, significantly reducing the possibility of falling. The algorithm has been successfully tested by generating walking trajectories under different terrain conditions on a biped robot of 10 DOFs. PTA has shown to be simple and suitable to generate real time walking trajectories, despite reduced computing resources of a commercial embedded microcontroller. Experimental evidence and comparisons to other state-of-the-art methods demonstrates a better performance of the proposed method in generating walking trajectories under different ground conditions.
* 25 Pages
Robust Fuzzy corner detector
May 21, 2014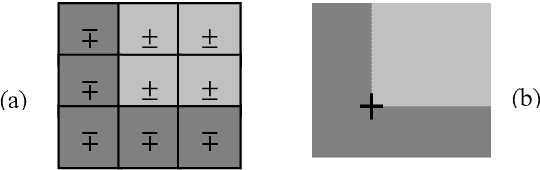
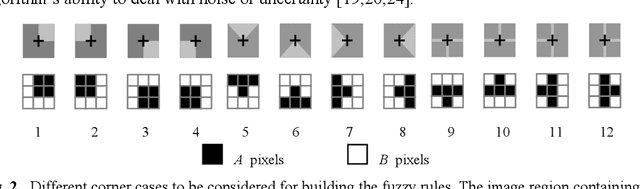
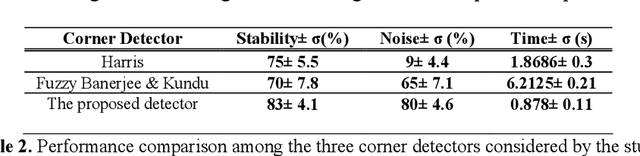
Reliable corner detection is an important task in determining the shape of different regions within an image. Real-life image data are always imprecise due to inherent uncertainties that may arise from the imaging process such as defocusing, illumination changes, noise, etc. Therefore, the localization and detection of corners has become a difficult task to accomplish under such imperfect situations. On the other hand, Fuzzy systems are well known for their efficient handling of impreciseness and incompleteness, which make them inherently suitable for modelling corner properties by means of a rule-based fuzzy system. The paper presents a corner detection algorithm which employs such fuzzy reasoning. The robustness of the proposed algorithm is compared to well-known conventional corner detectors and its performance is also tested over a number of benchmark images to illustrate the efficiency of the algorithm under uncertainty.
* 15 Pages