 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHands-on experiments on intelligent behavior for mobile robots
Jun 30, 2014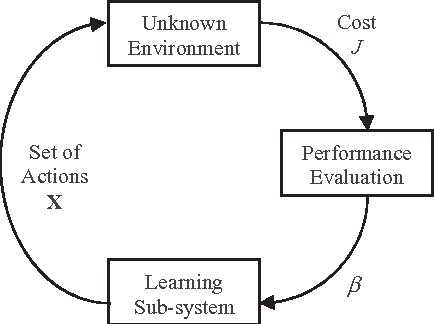
In recent years, Artificial Intelligence techniques have emerged as useful tools for solving various engineering problems that were not possible or convenient to handle by traditional methods. AI has directly influenced many areas of computer science and becomes an important part of the engineering curriculum. However, determining the important topics for a single semester AI course is a nontrivial task, given the lack of a general methodology. AI concepts commonly overlap with many other disciplines involving a wide range of subjects, including applied approaches to more formal mathematical issues. This paper presents the use of a simple robotic platform to assist the learning of basic AI concepts. The study is guided through some simple experiments using autonomous mobile robots. The central algorithm is the Learning Automata. Using LA, each robot action is applied to an environment to be evaluated by means of a fitness value. The response of the environment is used by the automata to select its next action. This procedure holds until the goal task is reached. The proposal addresses the AI study by offering in LA a unifying context to draw together several of the topics of AI and motivating the students to learn by building some hands on laboratory exercises. The presented material has been successfully tested as AI teaching aide in the University of Guadalajara robotics group as it motivates students and increases enrolment and retention while educating better computer engineers.
* 11 Pages
Circle detection using Discrete Differential Evolution Optimization
May 28, 2014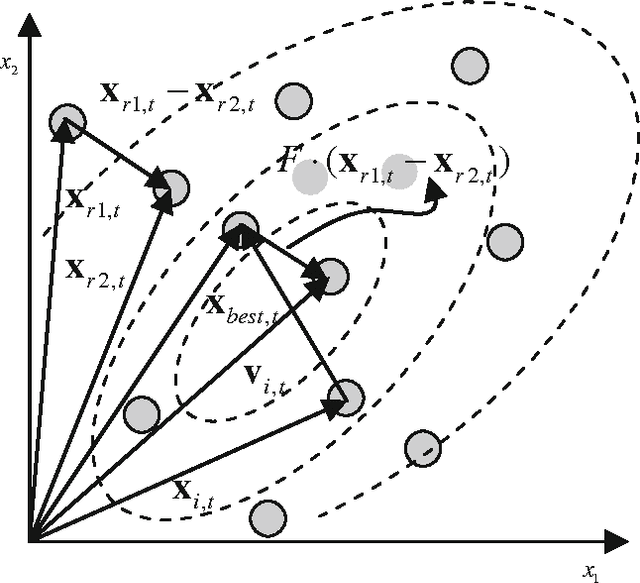
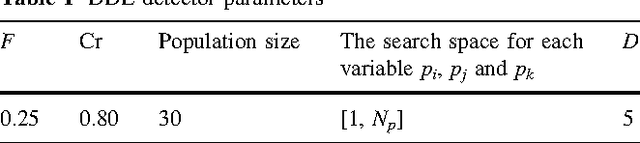
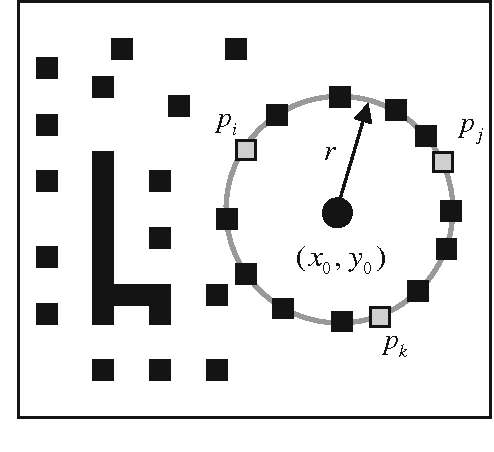
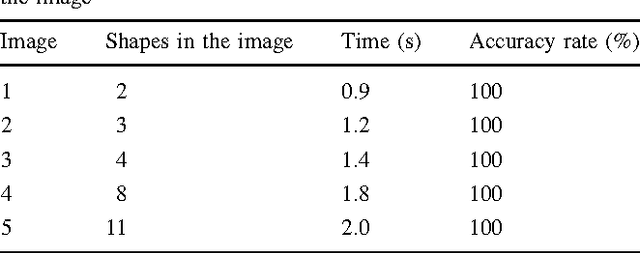
This paper introduces a circle detection method based on Differential Evolution (DE) optimization. Just as circle detection has been lately considered as a fundamental component for many computer vision algorithms, DE has evolved as a successful heuristic method for solving complex optimization problems, still keeping a simple structure and an easy implementation. It has also shown advantageous convergence properties and remarkable robustness. The detection process is considered similar to a combinational optimization problem. The algorithm uses the combination of three edge points as parameters to determine circles candidates in the scene yielding a reduction of the search space. The objective function determines if some circle candidates are actually present in the image. This paper focuses particularly on one DE-based algorithm known as the Discrete Differential Evolution (DDE), which eventually has shown better results than the original DE in particular for solving combinatorial problems. In the DDE, suitable conversion routines are incorporated into the DE, aiming to operate from integer values to real values and then getting integer values back, following the crossover operation. The final algorithm is a fast circle detector that locates circles with sub-pixel accuracy even considering complicated conditions and noisy images. Experimental results on several synthetic and natural images with varying range of complexity validate the efficiency of the proposed technique considering accuracy, speed, and robustness.
* 20 Pages. arXiv admin note: text overlap with arXiv:1405.7242
Polynomial trajectory algorithm for a biped robot
May 23, 2014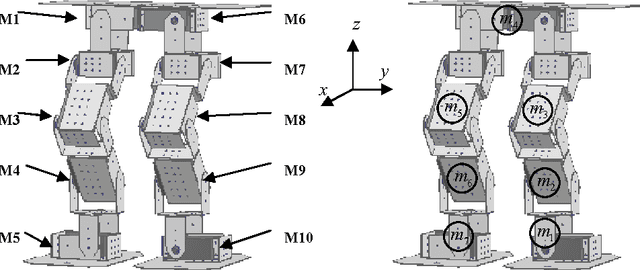
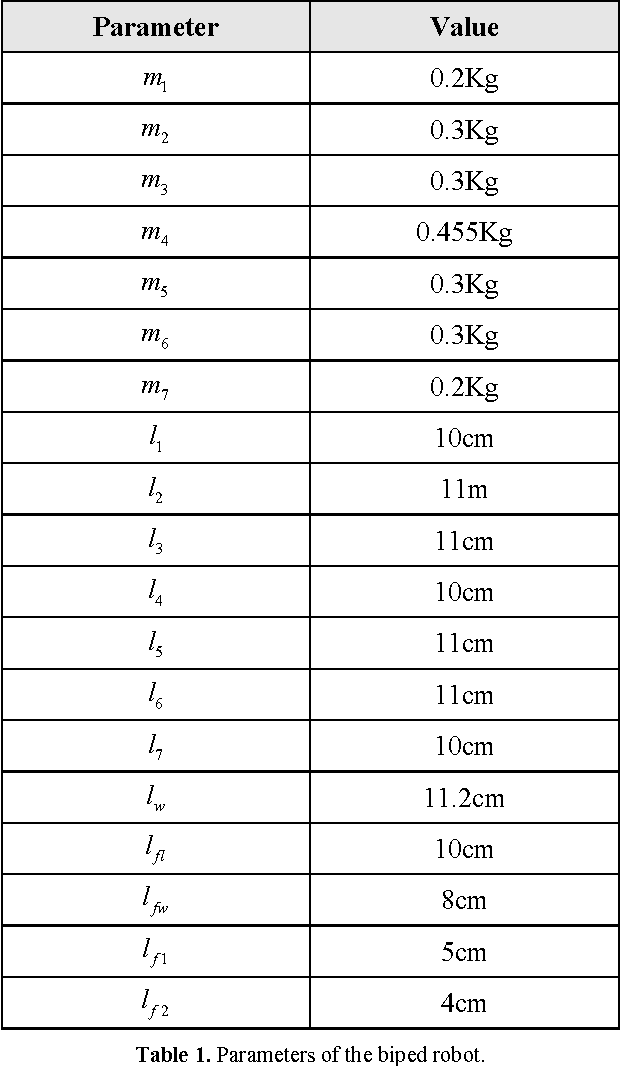
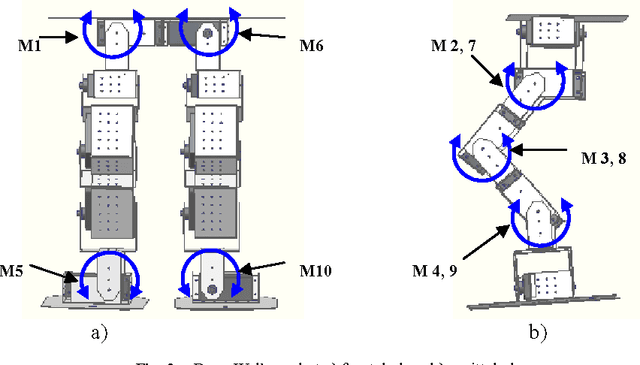
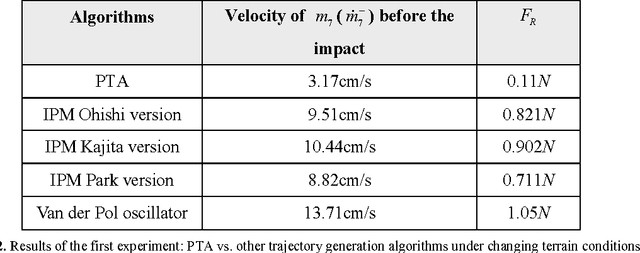
Building trajectories for biped robot walking is a complex task considering all degrees of freedom (DOFs) commonly bound within the mechanical structure. A typical problem for such robots is the instability produced by violent transitions between walking phases in particular when a swinging leg impacts the surface. Although extensive research on novel efficient walking algorithms has been conducted, falls commonly appear as the walking speed increases or as the terrain condition changes. This paper presents a polynomial trajectory generation algorithm (PTA) to implement the walking on biped robots following the cubic Hermitian polynomial interpolation between initial and final conditions. The proposed algorithm allows smooth transitions between walking phases, significantly reducing the possibility of falling. The algorithm has been successfully tested by generating walking trajectories under different terrain conditions on a biped robot of 10 DOFs. PTA has shown to be simple and suitable to generate real time walking trajectories, despite reduced computing resources of a commercial embedded microcontroller. Experimental evidence and comparisons to other state-of-the-art methods demonstrates a better performance of the proposed method in generating walking trajectories under different ground conditions.
* 25 Pages
Robust Fuzzy corner detector
May 21, 2014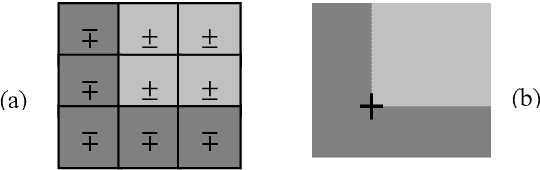
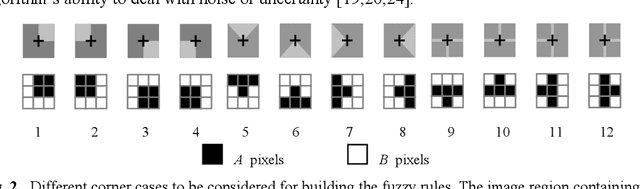
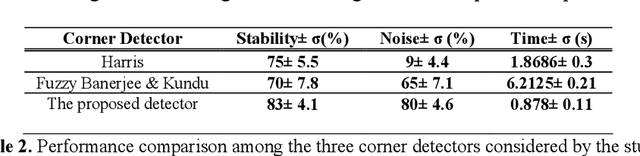
Reliable corner detection is an important task in determining the shape of different regions within an image. Real-life image data are always imprecise due to inherent uncertainties that may arise from the imaging process such as defocusing, illumination changes, noise, etc. Therefore, the localization and detection of corners has become a difficult task to accomplish under such imperfect situations. On the other hand, Fuzzy systems are well known for their efficient handling of impreciseness and incompleteness, which make them inherently suitable for modelling corner properties by means of a rule-based fuzzy system. The paper presents a corner detection algorithm which employs such fuzzy reasoning. The robustness of the proposed algorithm is compared to well-known conventional corner detectors and its performance is also tested over a number of benchmark images to illustrate the efficiency of the algorithm under uncertainty.
* 15 Pages