 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Forecasting for Network Resource Analysis in Integrated Terrestrial and Non-Terrestrial Networks
Mar 26, 2025Efficient resource management is critical for Non-Terrestrial Networks (NTNs) to provide consistent, high-quality service in remote and under-served regions. While traditional single-point prediction methods, such as Long-Short Term Memory (LSTM), have been used in terrestrial networks, they often fall short in NTNs due to the complexity of satellite dynamics, signal latency and coverage variability. Probabilistic forecasting, which quantifies the uncertainties of the predictions, is a robust alternative. In this paper, we evaluate the application of probabilistic forecasting techniques, in particular SFF, to NTN resource allocation scenarios. Our results show their effectiveness in predicting bandwidth and capacity requirements in different NTN segments of probabilistic forecasting compared to single-point prediction techniques such as LSTM. The results show the potential of black probabilistic forecasting models to provide accurate and reliable predictions and to quantify their uncertainty, making them indispensable for optimizing NTN resource allocation. At the end of the paper, we also present application scenarios and a standardization roadmap for the use of probabilistic forecasting in integrated Terrestrial Network (TN)-NTN environments.
Learn More by Using Less: Distributed Learning with Energy-Constrained Devices
Dec 03, 2024



Federated Learning (FL) has emerged as a solution for distributed model training across decentralized, privacy-preserving devices, but the different energy capacities of participating devices (system heterogeneity) constrain real-world implementations. These energy limitations not only reduce model accuracy but also increase dropout rates, impacting on convergence in practical FL deployments. In this work, we propose LeanFed, an energy-aware FL framework designed to optimize client selection and training workloads on battery-constrained devices. LeanFed leverages adaptive data usage by dynamically adjusting the fraction of local data each device utilizes during training, thereby maximizing device participation across communication rounds while ensuring they do not run out of battery during the process. We rigorously evaluate LeanFed against traditional FedAvg on CIFAR-10 and CIFAR-100 datasets, simulating various levels of data heterogeneity and device participation rates. Results show that LeanFed consistently enhances model accuracy and stability, particularly in settings with high data heterogeneity and limited battery life, by mitigating client dropout and extending device availability. This approach demonstrates the potential of energy-efficient, privacy-preserving FL in real-world, large-scale applications, setting a foundation for robust and sustainable pervasive AI on resource-constrained networks.
F-KANs: Federated Kolmogorov-Arnold Networks
Jul 29, 2024



In this paper, we present an innovative federated learning (FL) approach that utilizes Kolmogorov-Arnold Networks (KANs) for classification tasks. By utilizing the adaptive activation capabilities of KANs in a federated framework, we aim to improve classification capabilities while preserving privacy. The study evaluates the performance of federated KANs (F- KANs) compared to traditional Multi-Layer Perceptrons (MLPs) on classification task. The results show that the F-KANs model significantly outperforms the federated MLP model in terms of accuracy, precision, recall, F1 score and stability, and achieves better performance, paving the way for more efficient and privacy-preserving predictive analytics.
On the Impact of PRB Load Uncertainty Forecasting for Sustainable Open RAN
Jul 19, 2024



The transition to sustainable Open Radio Access Network (O-RAN) architectures brings new challenges for resource management, especially in predicting the utilization of Physical Resource Block (PRB)s. In this paper, we propose a novel approach to characterize the PRB load using probabilistic forecasting techniques. First, we provide background information on the O-RAN architecture and components and emphasize the importance of energy/power consumption models for sustainable implementations. The problem statement highlights the need for accurate PRB load prediction to optimize resource allocation and power efficiency. We then investigate probabilistic forecasting techniques, including Simple-Feed-Forward (SFF), DeepAR, and Transformers, and discuss their likelihood model assumptions. The simulation results show that DeepAR estimators predict the PRBs with less uncertainty and effectively capture the temporal dependencies in the dataset compared to SFF- and Transformer-based models, leading to power savings. Different percentile selections can also increase power savings, but at the cost of over-/under provisioning. At the same time, the performance of the Long-Short Term Memory (LSTM) is shown to be inferior to the probabilistic estimators with respect to all error metrics. Finally, we outline the importance of probabilistic, prediction-based characterization for sustainable O-RAN implementations and highlight avenues for future research.
Kolmogorov-Arnold Networks (KANs) for Time Series Analysis
May 14, 2024


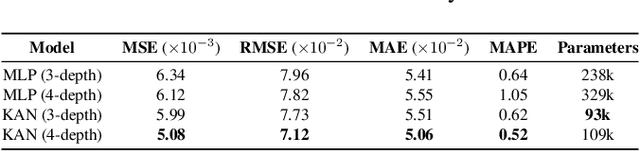
This paper introduces a novel application of Kolmogorov-Arnold Networks (KANs) to time series forecasting, leveraging their adaptive activation functions for enhanced predictive modeling. Inspired by the Kolmogorov-Arnold representation theorem, KANs replace traditional linear weights with spline-parametrized univariate functions, allowing them to learn activation patterns dynamically. We demonstrate that KANs outperforms conventional Multi-Layer Perceptrons (MLPs) in a real-world satellite traffic forecasting task, providing more accurate results with considerably fewer number of learnable parameters. We also provide an ablation study of KAN-specific parameters impact on performance. The proposed approach opens new avenues for adaptive forecasting models, emphasizing the potential of KANs as a powerful tool in predictive analytics.
Proximal Policy Optimization for Integrated Sensing and Communication in mmWave Systems
Jun 27, 2023In wireless communication systems, mmWave beam tracking is a critical task that affects both sensing and communications, as it is related to the knowledge of the wireless channel. We consider a setup in which a Base Station (BS) needs to dynamically choose whether the resource will be allocated for one of the three operations: sensing (beam tracking), downlink, or uplink transmission. We devise an approach based on the Proximal Policy Optimization (PPO) algorithm for choosing the resource allocation and beam tracking at a given time slot. The proposed framework takes into account the variable quality of the wireless channel and optimizes the decisions in a coordinated manner. Simulation results demonstrate that the proposed method achieves significant performance improvements in terms of average packet error rate (PER) compared to the baseline methods while providing a significant reduction in beam tracking overhead. We also show that our proposed PPO-based framework provides an effective solution to the resource allocation problem in beam tracking and communication, exhibiting a great generalization performance regardless of the stochastic behavior of the system.
EMF Exposure Mitigation in RIS-Assisted Multi-Beam Communications
May 11, 2023This paper proposes a method for reducing {third-party} exposure to electromagnetic fields (EMF) by exploiting the capability of a reconfigurable intelligent surfaces' (RIS) to manipulate the electromagnetic environment. We consider users capable of multi-beam communication, such that a user can use a set of different propagation paths enabled by the RIS. The optimization objective is to find propagation alternatives that allow to maintain the target quality of service while minimizing the level of EMF at surrounding non-intended users (NUEs). We provide an evolutionary heuristic solution based on Genetic Algorithm (GA) for power equalization and multi-beam selection of a codebook at the Base Station. Our results show valuable insights into how RIS-assisted multi-beam communications can mitigate EMF exposure with minimal degradation of the spectral efficiency.
OnRMap: An Online Radio Mapping Approach for Large Intelligent Surfaces
Feb 06, 2023We introduce OnRMap, an online radio mapping (RMap) approach for the sensing and localization of active users (AUs), devices that are transmitting radio signals, and passive elements (PEs), elements that are in the environment and are illuminated by the AUs' radio signals. OnRMap processes the signals received by a large intelligent surface and produces a radio map (RM) of the environment based on signal processing techniques. The method then senses and locate the different elements without the need for offline scanning phases, which is important for environments with frequently changing spatial layouts. Empirical results demonstrate that OnRMap presents a higher localization accuracy than an offline method, but the price paid for being an online method is a moderate reduction in the detection rate.
Floor Map Reconstruction Through Radio Sensing and Learning By a Large Intelligent Surface
Jun 21, 2022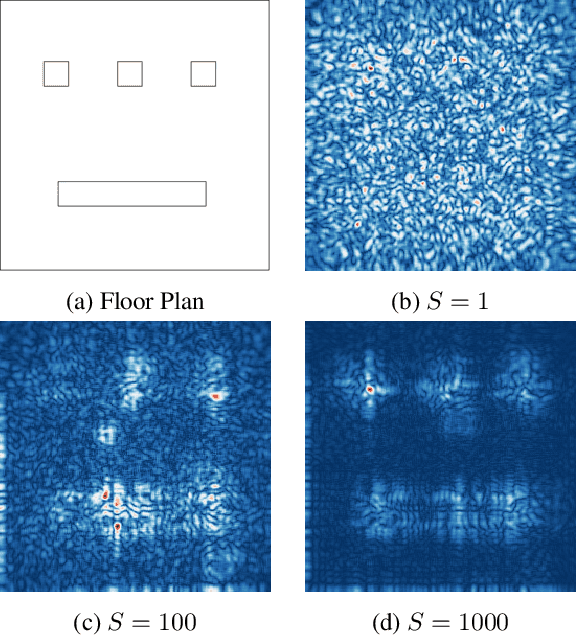
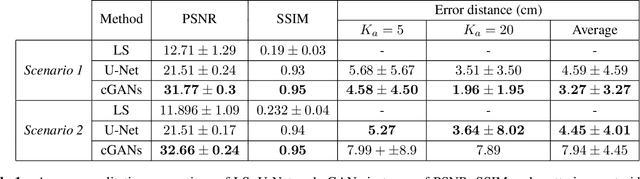
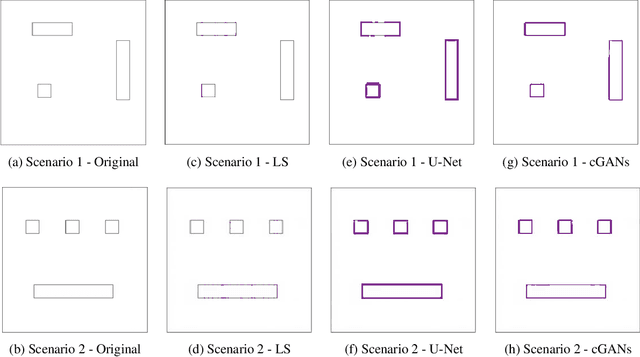
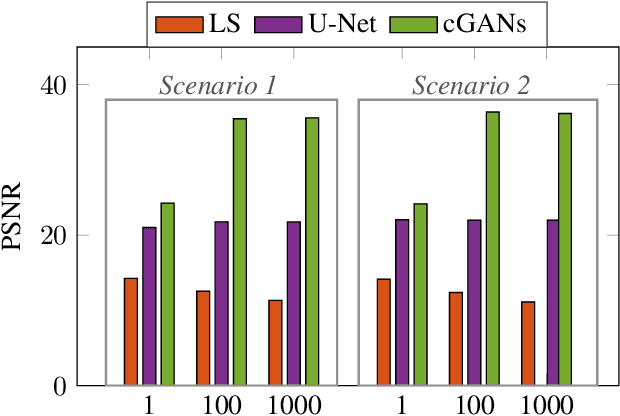
Environmental scene reconstruction is of great interest for autonomous robotic applications, since an accurate representation of the environment is necessary to ensure safe interaction with robots. Equally important, it is also vital to ensure reliable communication between the robot and its controller. Large Intelligent Surface (LIS) is a technology that has been extensively studied due to its communication capabilities. Moreover, due to the number of antenna elements, these surfaces arise as a powerful solution to radio sensing. This paper presents a novel method to translate radio environmental maps obtained at the LIS to floor plans of the indoor environment built of scatterers spread along its area. The usage of a Least Squares (LS) based method, U-Net (UN) and conditional Generative Adversarial Networks (cGANs) were leveraged to perform this task. We show that the floor plan can be correctly reconstructed using both local and global measurements.
User Clustering for Rate Splitting using Machine Learning
May 23, 2022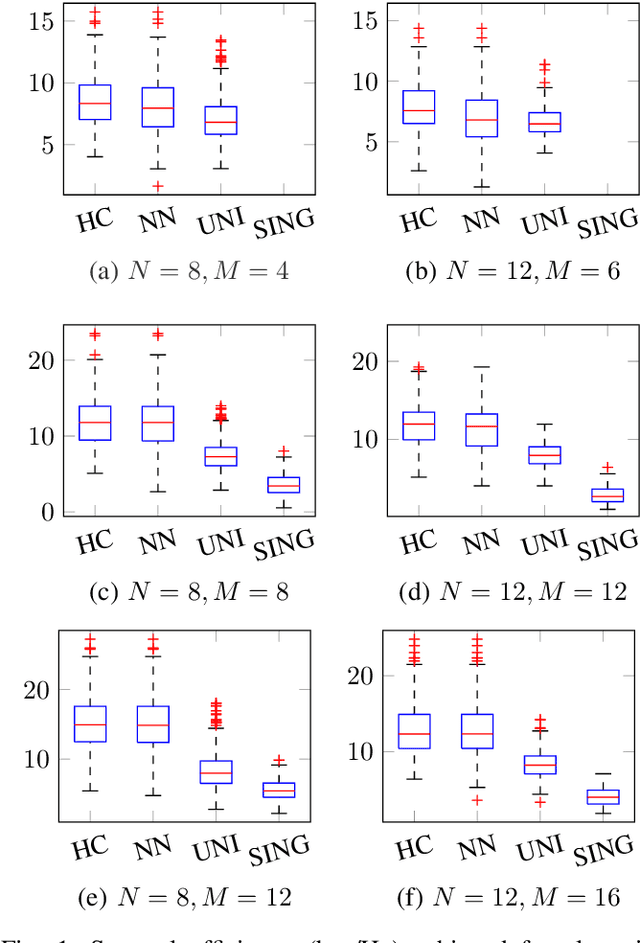
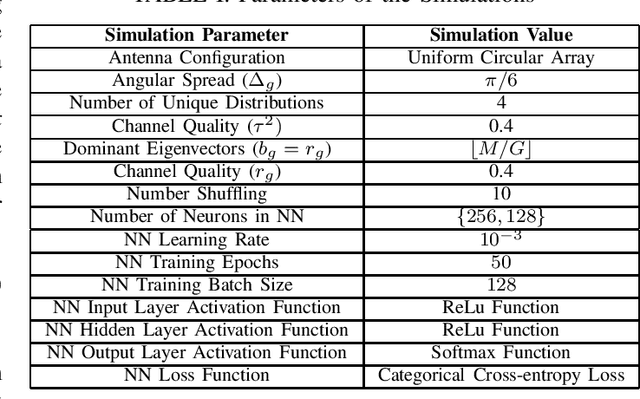
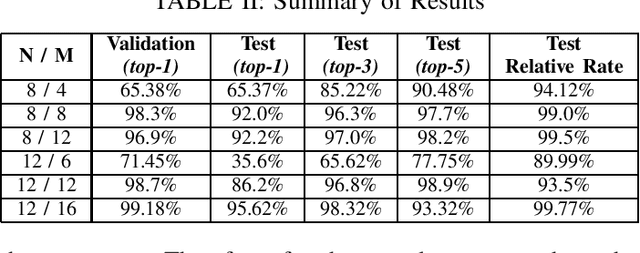
Hierarchical Rate Splitting (HRS) schemes proposed in recent years have shown to provide significant improvements in exploiting spatial diversity in wireless networks and provide high throughput for all users while minimising interference among them. Hence, one of the major challenges for such HRS schemes is the necessity to know the optimal clustering of these users based only on their Channel State Information (CSI). This clustering problem is known to be NP hard and, to deal with the unmanageable complexity of finding an optimal solution, in this work a scalable and much lighter clustering mechanism based on Neural Network (NN) is proposed. The accuracy and performance metrics show that the NN is able to learn and cluster the users based on the noisy channel response and is able to achieve a rate comparable to other more complex clustering schemes from the literature.