 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEncore: Conditioning Trajectory Forecasting via Biased Ego Rehearsals
May 12, 2026Learning and representing the subjectivities of agents has become a challenging but crucial problem in the trajectory prediction task. Such subjectivities not only present specific spatial or temporal structures, but also are anisotropic for all interaction participants. Despite great efforts, it remains difficult to explicitly learn and forecast these subjectivities, let alone further modulate models' predictions through a specific ego's subjectivity. Inspired by prefactual thoughts in psychology and relevant theatrical concepts, we interpret such subjectivities in future trajectories as the continuous process from rehearsal to encore. In the rehearsal phase, the proposed ego predictor focuses on how each ego agent learns to derive and direct a set of explicitly biased rehearsal trajectories for all participants in the scene from the short-term observations. Then, these rehearsal trajectories serve as immediate controls to condition final predictions, providing direct yet distinct ego biases for the prediction network to simulate agents' various subjectivities. Experiments across datasets not only demonstrate a consistent improvement in the performance of the proposed \emph{Encore} trajectory prediction model but also provide clear interpretability regarding subjectivities as biased ego rehearsals.
Reverberation: Learning the Latencies Before Forecasting Trajectories
Nov 14, 2025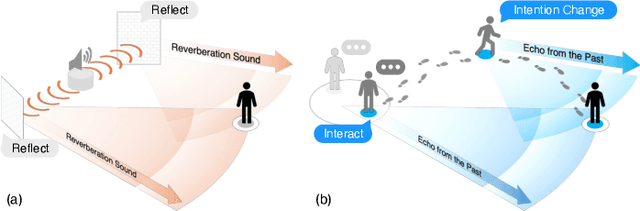
Bridging the past to the future, connecting agents both spatially and temporally, lies at the core of the trajectory prediction task. Despite great efforts, it remains challenging to explicitly learn and predict latencies, the temporal delays with which agents respond to different trajectory-changing events and adjust their future paths, whether on their own or interactively. Different agents may exhibit distinct latency preferences for noticing, processing, and reacting to any specific trajectory-changing event. The lack of consideration of such latencies may undermine the causal continuity of the forecasting system and also lead to implausible or unintended trajectories. Inspired by the reverberation curves in acoustics, we propose a new reverberation transform and the corresponding Reverberation (short for Rev) trajectory prediction model, which simulates and predicts different latency preferences of each agent as well as their stochasticity by using two explicit and learnable reverberation kernels, allowing for the controllable trajectory prediction based on these forecasted latencies. Experiments on multiple datasets, whether pedestrians or vehicles, demonstrate that Rev achieves competitive accuracy while revealing interpretable latency dynamics across agents and scenarios. Qualitative analyses further verify the properties of the proposed reverberation transform, highlighting its potential as a general latency modeling approach.
Who Walks With You Matters: Perceiving Social Interactions with Groups for Pedestrian Trajectory Prediction
Dec 03, 2024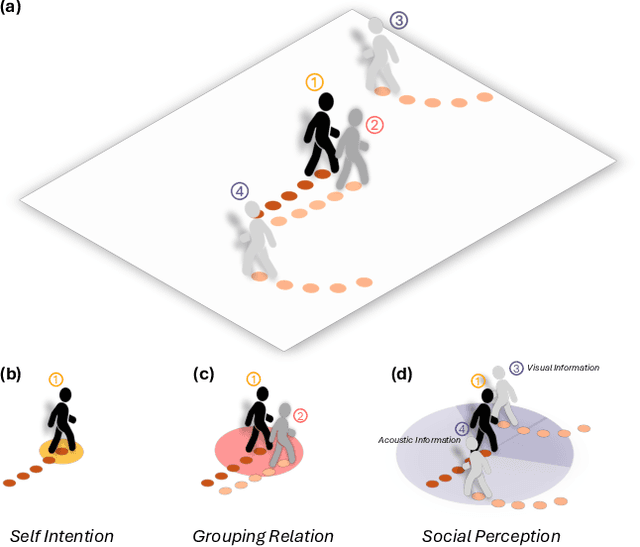

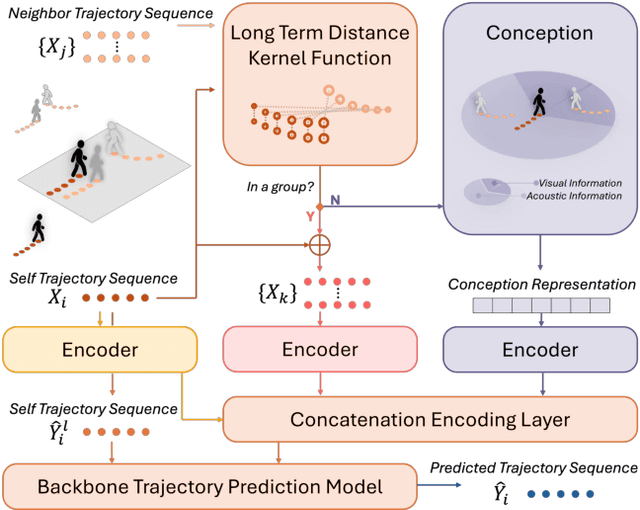
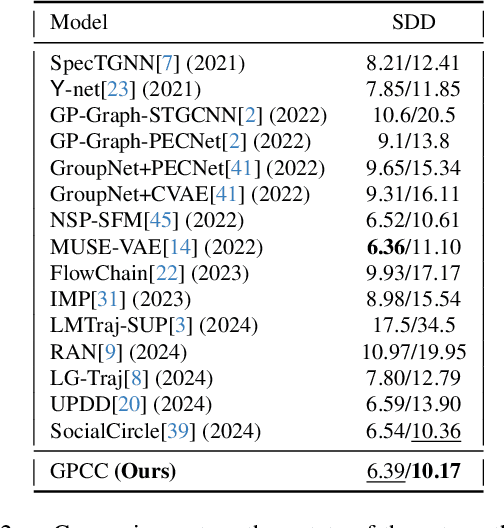
Understanding and anticipating human movement has become more critical and challenging in diverse applications such as autonomous driving and surveillance. The complex interactions brought by different relations between agents are a crucial reason that poses challenges to this task. Researchers have put much effort into designing a system using rule-based or data-based models to extract and validate the patterns between pedestrian trajectories and these interactions, which has not been adequately addressed yet. Inspired by how humans perceive social interactions with different level of relations to themself, this work proposes the GrouP ConCeption (short for GPCC) model composed of the Group method, which categorizes nearby agents into either group members or non-group members based on a long-term distance kernel function, and the Conception module, which perceives both visual and acoustic information surrounding the target agent. Evaluated across multiple datasets, the GPCC model demonstrates significant improvements in trajectory prediction accuracy, validating its effectiveness in modeling both social and individual dynamics. The qualitative analysis also indicates that the GPCC framework successfully leverages grouping and perception cues human-like intuitively to validate the proposed model's explainability in pedestrian trajectory forecasting.
Resonance: Learning to Predict Social-Aware Pedestrian Trajectories as Co-Vibrations
Dec 03, 2024



Learning to forecast the trajectories of intelligent agents like pedestrians has caught more researchers' attention. Despite researchers' efforts, it remains a challenge to accurately account for social interactions among agents when forecasting, and in particular, to simulate such social modifications to future trajectories in an explainable and decoupled way. Inspired by the resonance phenomenon of vibration systems, we propose the Resonance (short for Re) model to forecast pedestrian trajectories as co-vibrations, and regard that social interactions are associated with spectral properties of agents' trajectories. It forecasts future trajectories as three distinct vibration terms to represent agents' future plans from different perspectives in a decoupled way. Also, agents' social interactions and how they modify scheduled trajectories will be considered in a resonance-like manner by learning the similarities of their trajectory spectrums. Experiments on multiple datasets, whether pedestrian or vehicle, have verified the usefulness of our method both quantitatively and qualitatively.
SocialCircle: Learning the Angle-based Social Interaction Representation for Pedestrian Trajectory Prediction
Oct 09, 2023Analyzing and forecasting trajectories of agents like pedestrians and cars in complex scenes has become more and more significant in many intelligent systems and applications. The diversity and uncertainty in socially interactive behaviors among a rich variety of agents make this task more challenging than other deterministic computer vision tasks. Researchers have made a lot of efforts to quantify the effects of these interactions on future trajectories through different mathematical models and network structures, but this problem has not been well solved. Inspired by marine animals that localize the positions of their companions underwater through echoes, we build a new anglebased trainable social representation, named SocialCircle, for continuously reflecting the context of social interactions at different angular orientations relative to the target agent. We validate the effect of the proposed SocialCircle by training it along with several newly released trajectory prediction models, and experiments show that the SocialCircle not only quantitatively improves the prediction performance, but also qualitatively helps better consider social interactions when forecasting pedestrian trajectories in a way that is consistent with human intuitions.
Another Vertical View: A Hierarchical Network for Heterogeneous Trajectory Prediction via Spectrums
Apr 11, 2023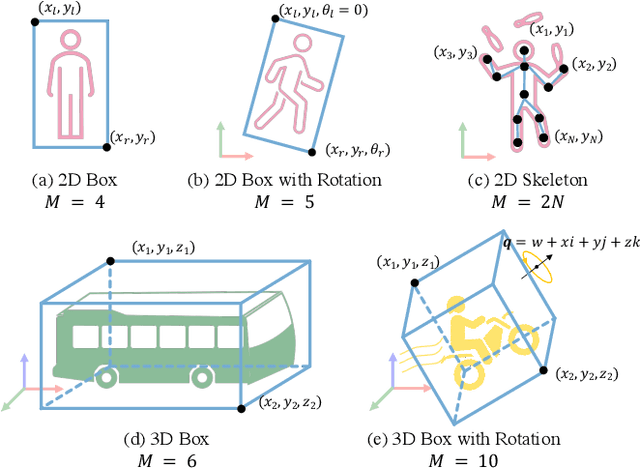
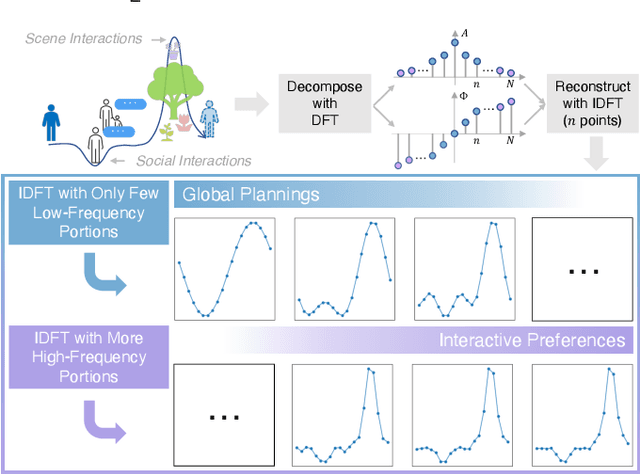
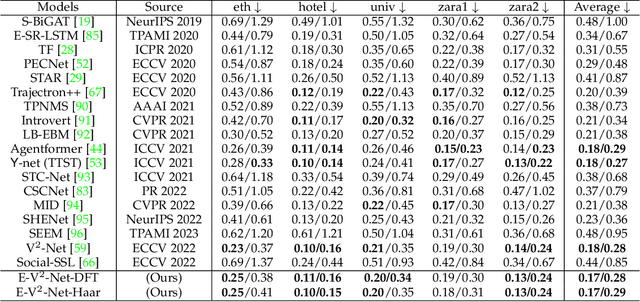
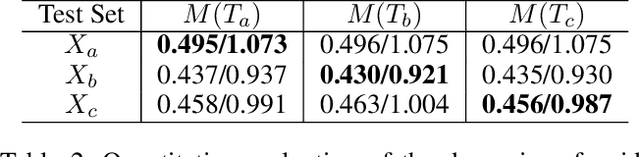
With the fast development of AI-related techniques, the applications of trajectory prediction are no longer limited to easier scenes and trajectories. More and more heterogeneous trajectories with different representation forms, such as 2D or 3D coordinates, 2D or 3D bounding boxes, and even high-dimensional human skeletons, need to be analyzed and forecasted. Among these heterogeneous trajectories, interactions between different elements within a frame of trajectory, which we call the ``Dimension-Wise Interactions'', would be more complex and challenging. However, most previous approaches focus mainly on a specific form of trajectories, which means these methods could not be used to forecast heterogeneous trajectories, not to mention the dimension-wise interaction. Besides, previous methods mostly treat trajectory prediction as a normal time sequence generation task, indicating that these methods may require more work to directly analyze agents' behaviors and social interactions at different temporal scales. In this paper, we bring a new ``view'' for trajectory prediction to model and forecast trajectories hierarchically according to different frequency portions from the spectral domain to learn to forecast trajectories by considering their frequency responses. Moreover, we try to expand the current trajectory prediction task by introducing the dimension $M$ from ``another view'', thus extending its application scenarios to heterogeneous trajectories vertically. Finally, we adopt the bilinear structure to fuse two factors, including the frequency response and the dimension-wise interaction, to forecast heterogeneous trajectories via spectrums hierarchically in a generic way. Experiments show that the proposed model outperforms most state-of-the-art methods on ETH-UCY, Stanford Drone Dataset and nuScenes with heterogeneous trajectories, including 2D coordinates, 2D and 3D bounding boxes.
CSCNet: Contextual Semantic Consistency Network for Trajectory Prediction in Crowded Spaces
Feb 17, 2022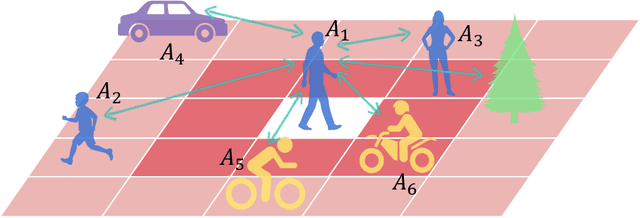
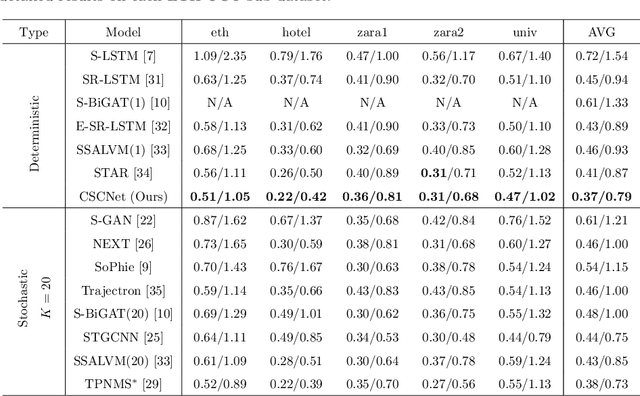
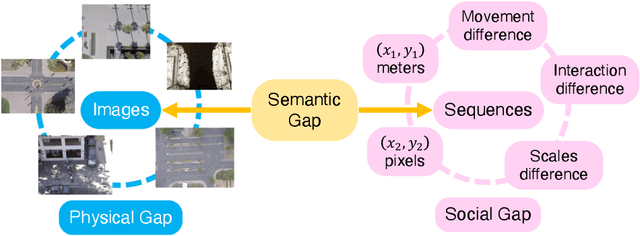

Trajectory prediction aims to predict the movement trend of the agents like pedestrians, bikers, vehicles. It is helpful to analyze and understand human activities in crowded spaces and widely applied in many areas such as surveillance video analysis and autonomous driving systems. Thanks to the success of deep learning, trajectory prediction has made significant progress. The current methods are dedicated to studying the agents' future trajectories under the social interaction and the sceneries' physical constraints. Moreover, how to deal with these factors still catches researchers' attention. However, they ignore the \textbf{Semantic Shift Phenomenon} when modeling these interactions in various prediction sceneries. There exist several kinds of semantic deviations inner or between social and physical interactions, which we call the "\textbf{Gap}". In this paper, we propose a \textbf{C}ontextual \textbf{S}emantic \textbf{C}onsistency \textbf{Net}work (\textbf{CSCNet}) to predict agents' future activities with powerful and efficient context constraints. We utilize a well-designed context-aware transfer to obtain the intermediate representations from the scene images and trajectories. Then we eliminate the differences between social and physical interactions by aligning activity semantics and scene semantics to cross the Gap. Experiments demonstrate that CSCNet performs better than most of the current methods quantitatively and qualitatively.
View Vertically: A Hierarchical Network for Trajectory Prediction via Fourier Spectrums
Oct 14, 2021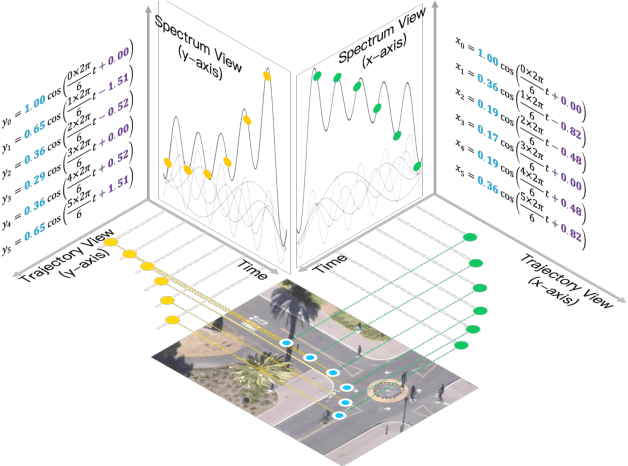
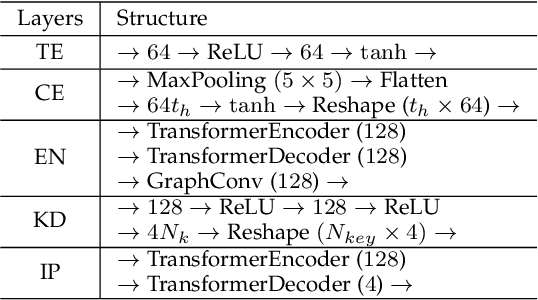
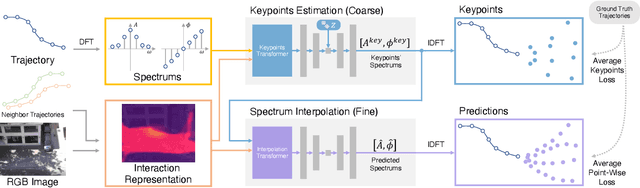
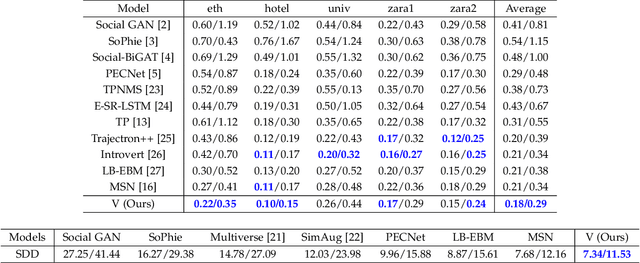
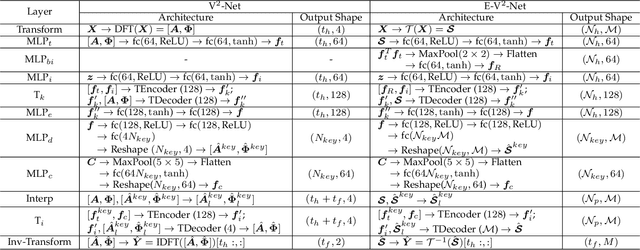
Learning to understand and predict future motions or behaviors for agents like humans and robots are critical to various autonomous platforms, such as behavior analysis, robot navigation, and self-driving cars. Intrinsic factors such as agents' diversified personalities and decision-making styles bring rich and diverse changes and multi-modal characteristics to their future plannings. Besides, the extrinsic interactive factors have also brought rich and varied changes to their trajectories. Previous methods mostly treat trajectories as time sequences, and reach great prediction performance. In this work, we try to focus on agents' trajectories in another view, i.e., the Fourier spectrums, to explore their future behavior rules in a novel hierarchical way. We propose the Transformer-based V model, which concatenates two continuous keypoints estimation and spectrum interpolation sub-networks, to model and predict agents' trajectories with spectrums in the keypoints and interactions levels respectively. Experimental results show that V outperforms most of current state-of-the-art methods on ETH-UCY and SDD trajectories dataset for about 15\% quantitative improvements, and performs better qualitative results.
MSN: Multi-Style Network for Trajectory Prediction
Jul 02, 2021



It is essential but challenging to predict future trajectories of various agents in complex scenes. Whether it is internal personality factors of agents, interactive behavior of the neighborhood, or the influence of surroundings, it will have an impact on their future behavior styles. It means that even for the same physical type of agents, there are huge differences in their behavior preferences. Although recent works have made significant progress in studying agents' multi-modal plannings, most of them still apply the same prediction strategy to all agents, which makes them difficult to fully show the multiple styles of vast agents. In this paper, we propose the Multi-Style Network (MSN) to focus on this problem by divide agents' preference styles into several hidden behavior categories adaptively and train each category's prediction network separately, therefore giving agents all styles of predictions simultaneously. Experiments demonstrate that our deterministic MSN-D and generative MSN-G outperform many recent state-of-the-art methods and show better multi-style characteristics in the visualized results.
BGM: Building a Dynamic Guidance Map without Visual Images for Trajectory Prediction
Oct 08, 2020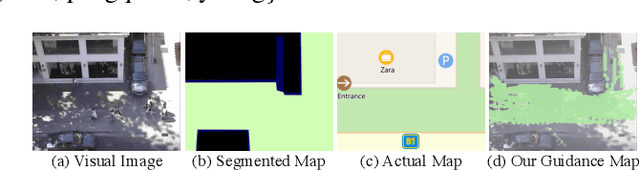
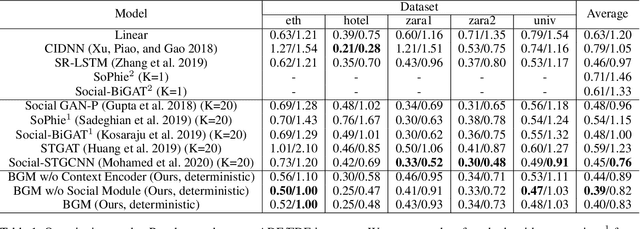
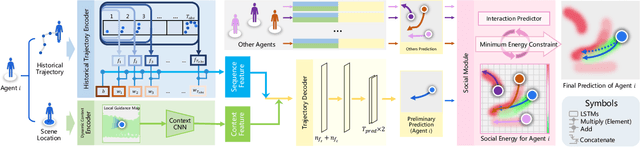
Visual images usually contain the informative context of the environment, thereby helping to predict agents' behaviors. However, they hardly impose the dynamic effects on agents' actual behaviors due to the respectively fixed semantics. To solve this problem, we propose a deterministic model named BGM to construct a guidance map to represent the dynamic semantics, which circumvents to use visual images for each agent to reflect the difference of activities in different periods. We first record all agents' activities in the scene within a period close to the current to construct a guidance map and then feed it to a Context CNN to obtain their context features. We adopt a Historical Trajectory Encoder to extract the trajectory features and then combine them with the context feature as the input of the social energy based trajectory decoder, thus obtaining the prediction that meets the social rules. Experiments demonstrate that BGM achieves state-of-the-art prediction accuracy on the two widely used ETH and UCY datasets and handles more complex scenarios.