 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeView Vertically: A Hierarchical Network for Trajectory Prediction via Fourier Spectrums
Paper and Code
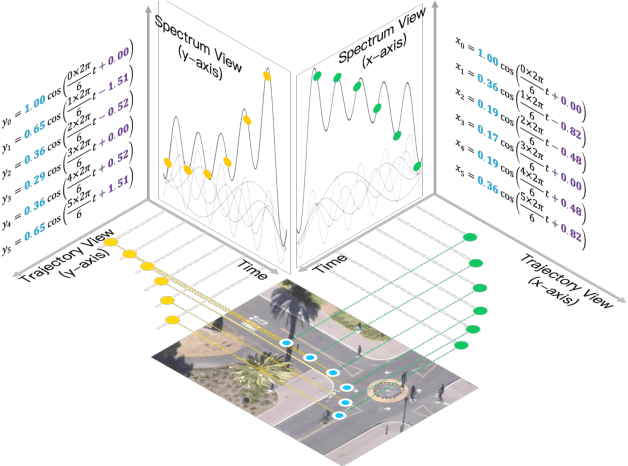
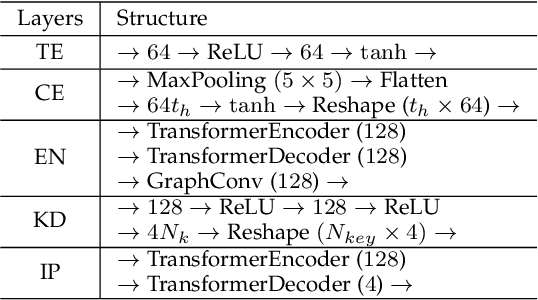
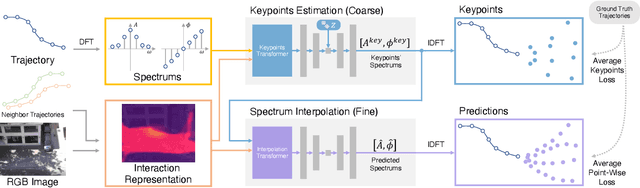
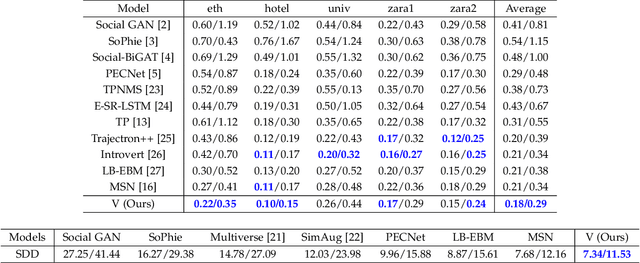
Learning to understand and predict future motions or behaviors for agents like humans and robots are critical to various autonomous platforms, such as behavior analysis, robot navigation, and self-driving cars. Intrinsic factors such as agents' diversified personalities and decision-making styles bring rich and diverse changes and multi-modal characteristics to their future plannings. Besides, the extrinsic interactive factors have also brought rich and varied changes to their trajectories. Previous methods mostly treat trajectories as time sequences, and reach great prediction performance. In this work, we try to focus on agents' trajectories in another view, i.e., the Fourier spectrums, to explore their future behavior rules in a novel hierarchical way. We propose the Transformer-based V model, which concatenates two continuous keypoints estimation and spectrum interpolation sub-networks, to model and predict agents' trajectories with spectrums in the keypoints and interactions levels respectively. Experimental results show that V outperforms most of current state-of-the-art methods on ETH-UCY and SDD trajectories dataset for about 15\% quantitative improvements, and performs better qualitative results.