 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCSCNet: Contextual Semantic Consistency Network for Trajectory Prediction in Crowded Spaces
Paper and Code
Feb 17, 2022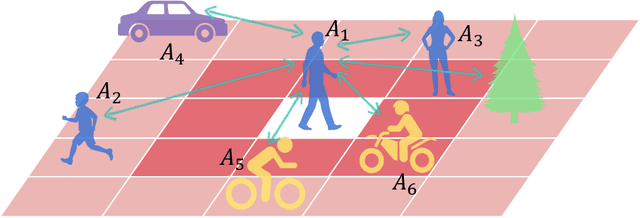
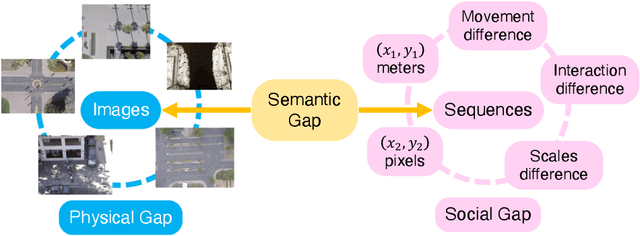

Trajectory prediction aims to predict the movement trend of the agents like pedestrians, bikers, vehicles. It is helpful to analyze and understand human activities in crowded spaces and widely applied in many areas such as surveillance video analysis and autonomous driving systems. Thanks to the success of deep learning, trajectory prediction has made significant progress. The current methods are dedicated to studying the agents' future trajectories under the social interaction and the sceneries' physical constraints. Moreover, how to deal with these factors still catches researchers' attention. However, they ignore the \textbf{Semantic Shift Phenomenon} when modeling these interactions in various prediction sceneries. There exist several kinds of semantic deviations inner or between social and physical interactions, which we call the "\textbf{Gap}". In this paper, we propose a \textbf{C}ontextual \textbf{S}emantic \textbf{C}onsistency \textbf{Net}work (\textbf{CSCNet}) to predict agents' future activities with powerful and efficient context constraints. We utilize a well-designed context-aware transfer to obtain the intermediate representations from the scene images and trajectories. Then we eliminate the differences between social and physical interactions by aligning activity semantics and scene semantics to cross the Gap. Experiments demonstrate that CSCNet performs better than most of the current methods quantitatively and qualitatively.