 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFairAD: Computationally Efficient Fair Graph Clustering via Algebraic Distance
Oct 31, 2025Due to the growing concern about unsavory behaviors of machine learning models toward certain demographic groups, the notion of 'fairness' has recently drawn much attention from the community, thereby motivating the study of fairness in graph clustering. Fair graph clustering aims to partition the set of nodes in a graph into $k$ disjoint clusters such that the proportion of each protected group within each cluster is consistent with the proportion of that group in the entire dataset. It is, however, computationally challenging to incorporate fairness constraints into existing graph clustering algorithms, particularly for large graphs. To address this problem, we propose FairAD, a computationally efficient fair graph clustering method. It first constructs a new affinity matrix based on the notion of algebraic distance such that fairness constraints are imposed. A graph coarsening process is then performed on this affinity matrix to find representative nodes that correspond to $k$ clusters. Finally, a constrained minimization problem is solved to obtain the solution of fair clustering. Experiment results on the modified stochastic block model and six public datasets show that FairAD can achieve fair clustering while being up to 40 times faster compared to state-of-the-art fair graph clustering algorithms.
Demystifying Distributed Training of Graph Neural Networks for Link Prediction
Jun 25, 2025Graph neural networks (GNNs) are powerful tools for solving graph-related problems. Distributed GNN frameworks and systems enhance the scalability of GNNs and accelerate model training, yet most are optimized for node classification. Their performance on link prediction remains underexplored. This paper demystifies distributed training of GNNs for link prediction by investigating the issue of performance degradation when each worker trains a GNN on its assigned partitioned subgraph without having access to the entire graph. We discover that the main sources of the issue come from not only the information loss caused by graph partitioning but also the ways of drawing negative samples during model training. While sharing the complete graph information with each worker resolves the issue and preserves link prediction accuracy, it incurs a high communication cost. We propose SpLPG, which effectively leverages graph sparsification to mitigate the issue of performance degradation at a reduced communication cost. Experiment results on several public real-world datasets demonstrate the effectiveness of SpLPG, which reduces the communication overhead by up to about 80% while mostly preserving link prediction accuracy.
M$^3$-Impute: Mask-guided Representation Learning for Missing Value Imputation
Oct 11, 2024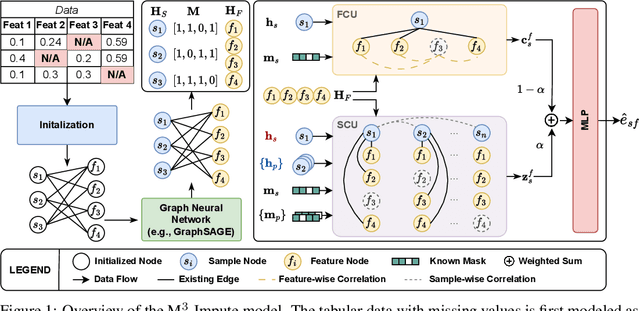
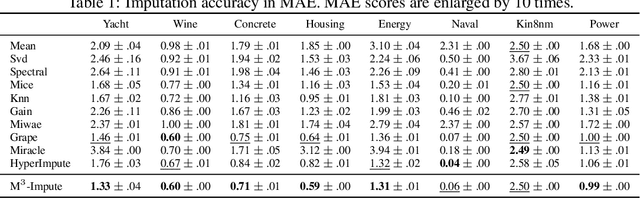
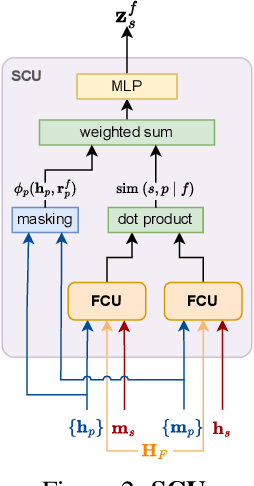
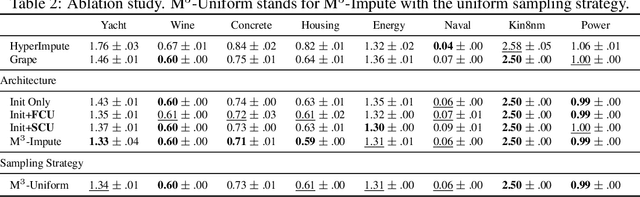
Missing values are a common problem that poses significant challenges to data analysis and machine learning. This problem necessitates the development of an effective imputation method to fill in the missing values accurately, thereby enhancing the overall quality and utility of the datasets. Existing imputation methods, however, fall short of explicitly considering the `missingness' information in the data during the embedding initialization stage and modeling the entangled feature and sample correlations during the learning process, thus leading to inferior performance. We propose M$^3$-Impute, which aims to explicitly leverage the missingness information and such correlations with novel masking schemes. M$^3$-Impute first models the data as a bipartite graph and uses a graph neural network to learn node embeddings, where the refined embedding initialization process directly incorporates the missingness information. They are then optimized through M$^3$-Impute's novel feature correlation unit (FRU) and sample correlation unit (SRU) that effectively captures feature and sample correlations for imputation. Experiment results on 25 benchmark datasets under three different missingness settings show the effectiveness of M$^3$-Impute by achieving 20 best and 4 second-best MAE scores on average.
CATGNN: Cost-Efficient and Scalable Distributed Training for Graph Neural Networks
Apr 02, 2024Graph neural networks have been shown successful in recent years. While different GNN architectures and training systems have been developed, GNN training on large-scale real-world graphs still remains challenging. Existing distributed systems load the entire graph in memory for graph partitioning, requiring a huge memory space to process large graphs and thus hindering GNN training on such large graphs using commodity workstations. In this paper, we propose CATGNN, a cost-efficient and scalable distributed GNN training system which focuses on scaling GNN training to billion-scale or larger graphs under limited computational resources. Among other features, it takes a stream of edges as input, instead of loading the entire graph in memory, for partitioning. We also propose a novel streaming partitioning algorithm named SPRING for distributed GNN training. We verify the correctness and effectiveness of CATGNN with SPRING on 16 open datasets. In particular, we demonstrate that CATGNN can handle the largest publicly available dataset with limited memory, which would have been infeasible without increasing the memory space. SPRING also outperforms state-of-the-art partitioning algorithms significantly, with a 50% reduction in replication factor on average.
FIS-ONE: Floor Identification System with One Label for Crowdsourced RF Signals
Jul 12, 2023Floor labels of crowdsourced RF signals are crucial for many smart-city applications, such as multi-floor indoor localization, geofencing, and robot surveillance. To build a prediction model to identify the floor number of a new RF signal upon its measurement, conventional approaches using the crowdsourced RF signals assume that at least few labeled signal samples are available on each floor. In this work, we push the envelope further and demonstrate that it is technically feasible to enable such floor identification with only one floor-labeled signal sample on the bottom floor while having the rest of signal samples unlabeled. We propose FIS-ONE, a novel floor identification system with only one labeled sample. FIS-ONE consists of two steps, namely signal clustering and cluster indexing. We first build a bipartite graph to model the RF signal samples and obtain a latent representation of each node (each signal sample) using our attention-based graph neural network model so that the RF signal samples can be clustered more accurately. Then, we tackle the problem of indexing the clusters with proper floor labels, by leveraging the observation that signals from an access point can be detected on different floors, i.e., signal spillover. Specifically, we formulate a cluster indexing problem as a combinatorial optimization problem and show that it is equivalent to solving a traveling salesman problem, whose (near-)optimal solution can be found efficiently. We have implemented FIS-ONE and validated its effectiveness on the Microsoft dataset and in three large shopping malls. Our results show that FIS-ONE outperforms other baseline algorithms significantly, with up to 23% improvement in adjusted rand index and 25% improvement in normalized mutual information using only one floor-labeled signal sample.
Run, Don't Walk: Chasing Higher FLOPS for Faster Neural Networks
Mar 07, 2023To design fast neural networks, many works have been focusing on reducing the number of floating-point operations (FLOPs). We observe that such reduction in FLOPs, however, does not necessarily lead to a similar level of reduction in latency. This mainly stems from inefficiently low floating-point operations per second (FLOPS). To achieve faster networks, we revisit popular operators and demonstrate that such low FLOPS is mainly due to frequent memory access of the operators, especially the depthwise convolution. We hence propose a novel partial convolution (PConv) that extracts spatial features more efficiently, by cutting down redundant computation and memory access simultaneously. Building upon our PConv, we further propose FasterNet, a new family of neural networks, which attains substantially higher running speed than others on a wide range of devices, without compromising on accuracy for various vision tasks. For example, on ImageNet-1k, our tiny FasterNet-T0 is $3.1\times$, $3.1\times$, and $2.5\times$ faster than MobileViT-XXS on GPU, CPU, and ARM processors, respectively, while being $2.9\%$ more accurate. Our large FasterNet-L achieves impressive $83.5\%$ top-1 accuracy, on par with the emerging Swin-B, while having $49\%$ higher inference throughput on GPU, as well as saving $42\%$ compute time on CPU. Code is available at \url{https://github.com/JierunChen/FasterNet}.
Characterizing the Efficiency of Graph Neural Network Frameworks with a Magnifying Glass
Nov 06, 2022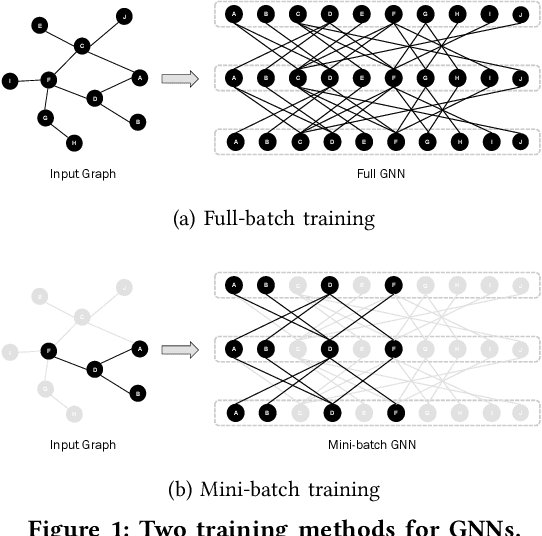
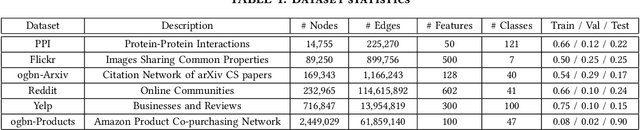
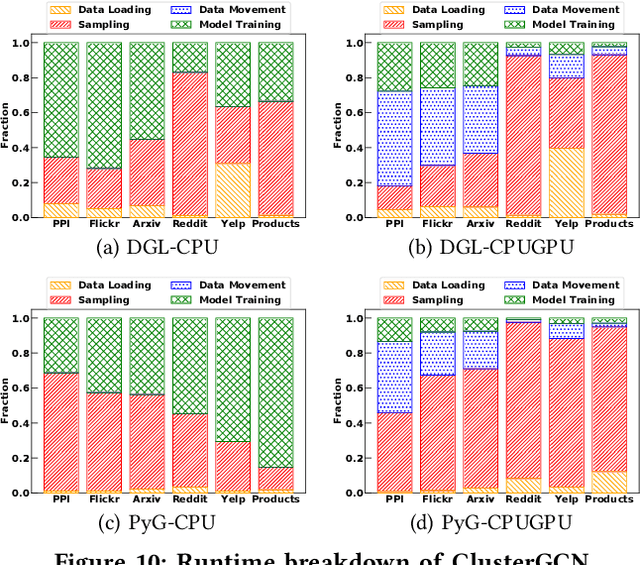
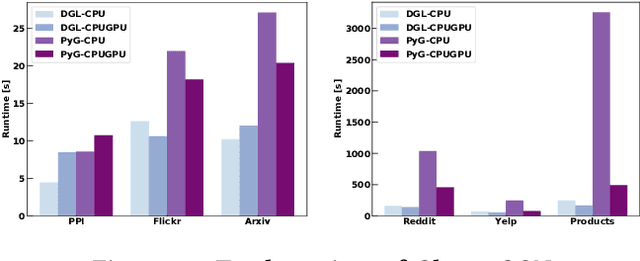
Graph neural networks (GNNs) have received great attention due to their success in various graph-related learning tasks. Several GNN frameworks have then been developed for fast and easy implementation of GNN models. Despite their popularity, they are not well documented, and their implementations and system performance have not been well understood. In particular, unlike the traditional GNNs that are trained based on the entire graph in a full-batch manner, recent GNNs have been developed with different graph sampling techniques for mini-batch training of GNNs on large graphs. While they improve the scalability, their training times still depend on the implementations in the frameworks as sampling and its associated operations can introduce non-negligible overhead and computational cost. In addition, it is unknown how much the frameworks are 'eco-friendly' from a green computing perspective. In this paper, we provide an in-depth study of two mainstream GNN frameworks along with three state-of-the-art GNNs to analyze their performance in terms of runtime and power/energy consumption. We conduct extensive benchmark experiments at several different levels and present detailed analysis results and observations, which could be helpful for further improvement and optimization.