 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeosmAG-Nav: A Hierarchical Semantic Topometric Navigation Stack for Robust Lifelong Indoor Autonomy
Mar 30, 2026The deployment of mobile robots in large-scale, multi-floor environments demands navigation systems that achieve spatial scalability without compromising local kinematic precision. Traditional navigation stacks, reliant on monolithic occupancy grid maps, face severe bottlenecks in storage efficiency, cross-floor reasoning, and long-horizon planning. To address these limitations, this paper presents osmAG-Nav, a complete, open-source ROS2 navigation stack built upon the hierarchical semantic topometric OpenStreetMap Area Graph (osmAG) map standard. The system follows a "System of Systems" architecture that decouples global topological reasoning from local metric execution. A Hierarchical osmAG planner replaces dense grid searches with an LCA-anchored pipeline on a passage-centric graph whose edge costs derive from local raster traversability rather than Euclidean distance, yielding low-millisecond planning on long campus-scale routes. A Rolling Window mechanism rasterizes a fixed-size local metric grid around the robot, keeping the local costmap memory footprint independent of the total mapped area, while a Segmented Execution strategy dispatches intermediate goals to standard ROS2 controllers for smooth handoffs. System robustness is reinforced by a structure-aware LiDAR localization framework that filters dynamic clutter against permanent architectural priors. Extensive experiments on a real-world multi-story indoor-outdoor campus (>11,025 m^2) show that, on the same-floor benchmark subset, osmAG-Nav delivers up to 7816x lower planning latency than a grid-based baseline on long routes while maintaining low path-length overhead and lifelong localization stability. A single-floor long-range robot mission further validates the integrated stack reliability. The full stack is released as modular ROS2 Lifecycle Nodes.
osmAG: Hierarchical Semantic Topometric Area Graph Maps in the OSM Format for Mobile Robotics
Sep 09, 2023Maps are essential to mobile robotics tasks like localization and planning. We propose the open street map (osm) XML based Area Graph file format to store hierarchical, topometric semantic multi-floor maps of indoor and outdoor environments, since currently no such format is popular within the robotics community. Building on-top of osm we leverage the available open source editing tools and libraries of osm, while adding the needed mobile robotics aspect with building-level obstacle representation yet very compact, topometric data that facilitates planning algorithms. Through the use of common osm keys as well as custom ones we leverage the power of semantic annotation to enable various applications. For example, we support planning based on robot capabilities, to take the locomotion mode and attributes in conjunction with the environment information into account. The provided C++ library is integrated into ROS. We evaluate the performance of osmAG using real data in a global path planning application on a very big osmAG map, demonstrating its convenience and effectiveness for mobile robots.
Optimizing the extended Fourier Mellin Transformation Algorithm
Jul 19, 2023



With the increasing application of robots, stable and efficient Visual Odometry (VO) algorithms are becoming more and more important. Based on the Fourier Mellin Transformation (FMT) algorithm, the extended Fourier Mellin Transformation (eFMT) is an image registration approach that can be applied to downward-looking cameras, for example on aerial and underwater vehicles. eFMT extends FMT to multi-depth scenes and thus more application scenarios. It is a visual odometry method which estimates the pose transformation between three overlapping images. On this basis, we develop an optimized eFMT algorithm that improves certain aspects of the method and combines it with back-end optimization for the small loop of three consecutive frames. For this we investigate the extraction of uncertainty information from the eFMT registration, the related objective function and the graph-based optimization. Finally, we design a series of experiments to investigate the properties of this approach and compare it with other VO and SLAM (Simultaneous Localization and Mapping) algorithms. The results show the superior accuracy and speed of our o-eFMT approach, which is published as open source.
Advancing Tabu and Restart in Local Search for Maximum Weight Cliques
Apr 22, 2018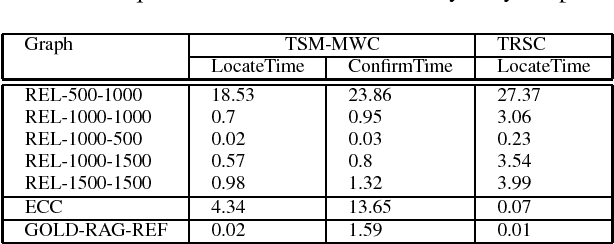
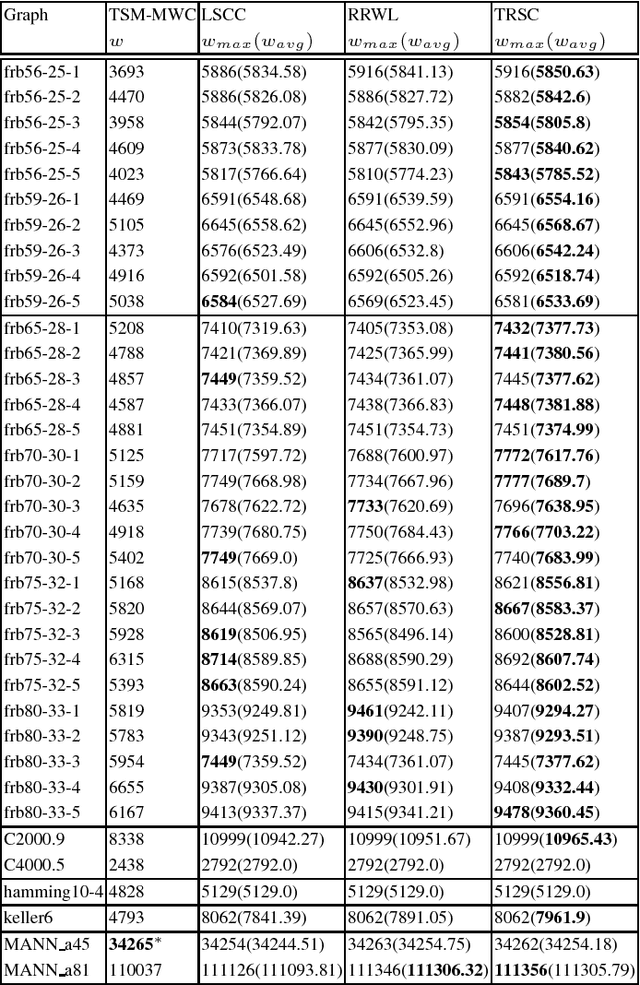
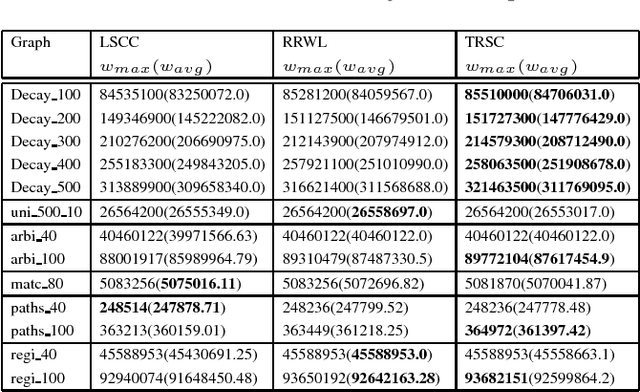
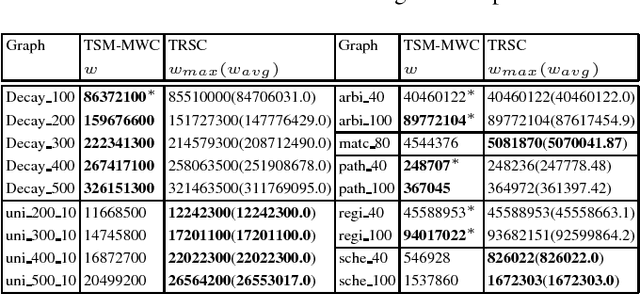
The tabu and restart are two fundamental strategies for local search. In this paper, we improve the local search algorithms for solving the Maximum Weight Clique (MWC) problem by introducing new tabu and restart strategies. Both the tabu and restart strategies proposed are based on the notion of a local search scenario, which involves not only a candidate solution but also the tabu status and unlocking relationship. Compared to the strategy of configuration checking, our tabu mechanism discourages forming a cycle of unlocking operations. Our new restart strategy is based on the re-occurrence of a local search scenario instead of that of a candidate solution. Experimental results show that the resulting MWC solver outperforms several state-of-the-art solvers on the DIMACS, BHOSLIB, and two benchmarks from practical applications.
Exploiting Reduction Rules and Data Structures: Local Search for Minimum Vertex Cover in Massive Graphs
Sep 19, 2015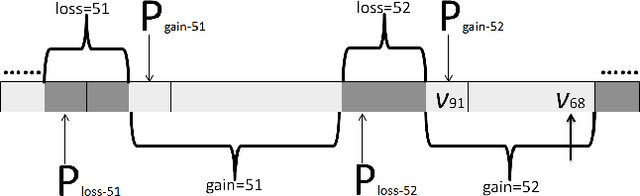
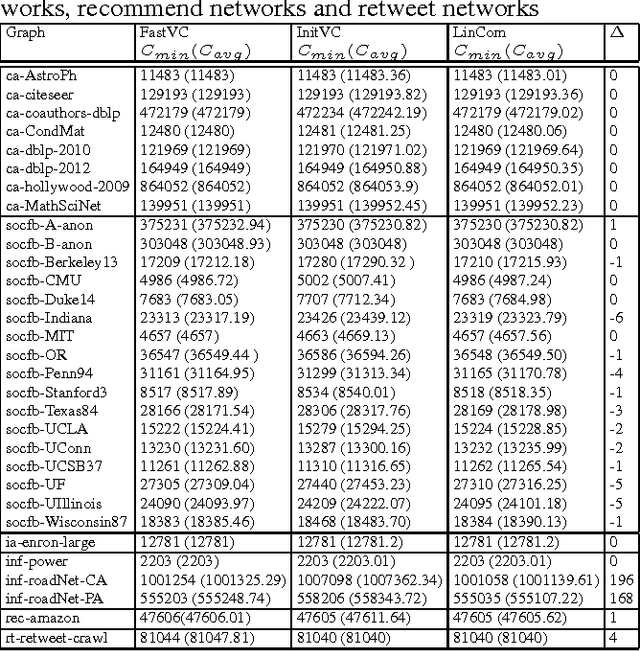
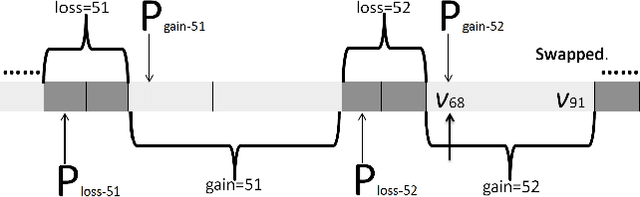
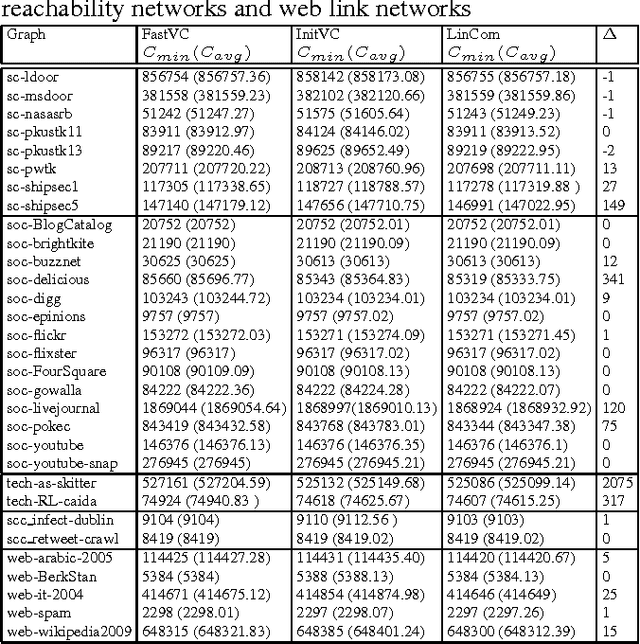
The Minimum Vertex Cover (MinVC) problem is a well-known NP-hard problem. Recently there has been great interest in solving this problem on real-world massive graphs. For such graphs, local search is a promising approach to finding optimal or near-optimal solutions. In this paper we propose a local search algorithm that exploits reduction rules and data structures to solve the MinVC problem in such graphs. Experimental results on a wide range of real-word massive graphs show that our algorithm finds better covers than state-of-the-art local search algorithms for MinVC. Also we present interesting results about the complexities of some well-known heuristics.