 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhi-4-reasoning Technical Report
Apr 30, 2025We introduce Phi-4-reasoning, a 14-billion parameter reasoning model that achieves strong performance on complex reasoning tasks. Trained via supervised fine-tuning of Phi-4 on carefully curated set of "teachable" prompts-selected for the right level of complexity and diversity-and reasoning demonstrations generated using o3-mini, Phi-4-reasoning generates detailed reasoning chains that effectively leverage inference-time compute. We further develop Phi-4-reasoning-plus, a variant enhanced through a short phase of outcome-based reinforcement learning that offers higher performance by generating longer reasoning traces. Across a wide range of reasoning tasks, both models outperform significantly larger open-weight models such as DeepSeek-R1-Distill-Llama-70B model and approach the performance levels of full DeepSeek-R1 model. Our comprehensive evaluations span benchmarks in math and scientific reasoning, coding, algorithmic problem solving, planning, and spatial understanding. Interestingly, we observe a non-trivial transfer of improvements to general-purpose benchmarks as well. In this report, we provide insights into our training data, our training methodologies, and our evaluations. We show that the benefit of careful data curation for supervised fine-tuning (SFT) extends to reasoning language models, and can be further amplified by reinforcement learning (RL). Finally, our evaluation points to opportunities for improving how we assess the performance and robustness of reasoning models.
Phi-3 Technical Report: A Highly Capable Language Model Locally on Your Phone
Apr 23, 2024
We introduce phi-3-mini, a 3.8 billion parameter language model trained on 3.3 trillion tokens, whose overall performance, as measured by both academic benchmarks and internal testing, rivals that of models such as Mixtral 8x7B and GPT-3.5 (e.g., phi-3-mini achieves 69% on MMLU and 8.38 on MT-bench), despite being small enough to be deployed on a phone. The innovation lies entirely in our dataset for training, a scaled-up version of the one used for phi-2, composed of heavily filtered web data and synthetic data. The model is also further aligned for robustness, safety, and chat format. We also provide some initial parameter-scaling results with a 7B and 14B models trained for 4.8T tokens, called phi-3-small and phi-3-medium, both significantly more capable than phi-3-mini (e.g., respectively 75% and 78% on MMLU, and 8.7 and 8.9 on MT-bench).
Textbooks Are All You Need
Jun 20, 2023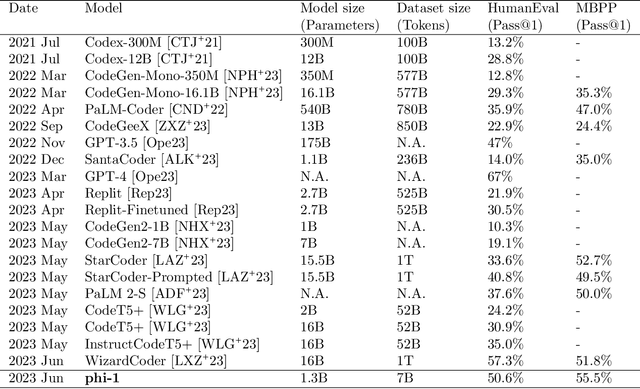
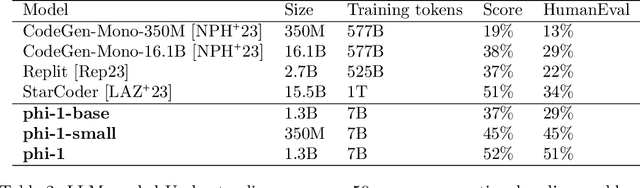
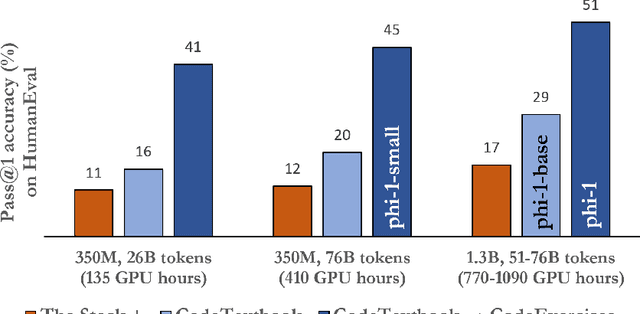
We introduce phi-1, a new large language model for code, with significantly smaller size than competing models: phi-1 is a Transformer-based model with 1.3B parameters, trained for 4 days on 8 A100s, using a selection of ``textbook quality" data from the web (6B tokens) and synthetically generated textbooks and exercises with GPT-3.5 (1B tokens). Despite this small scale, phi-1 attains pass@1 accuracy 50.6% on HumanEval and 55.5% on MBPP. It also displays surprising emergent properties compared to phi-1-base, our model before our finetuning stage on a dataset of coding exercises, and phi-1-small, a smaller model with 350M parameters trained with the same pipeline as phi-1 that still achieves 45% on HumanEval.
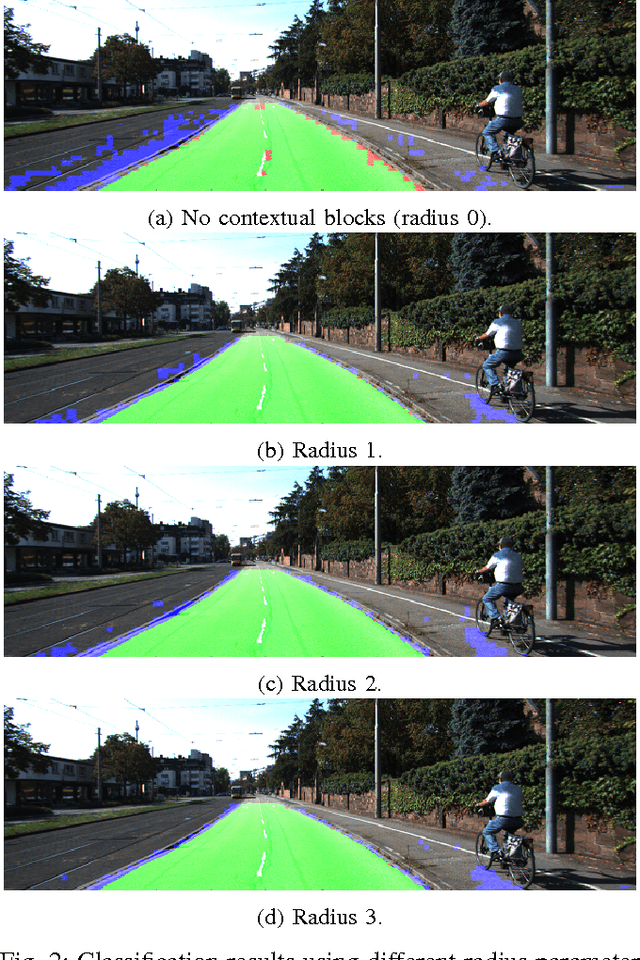
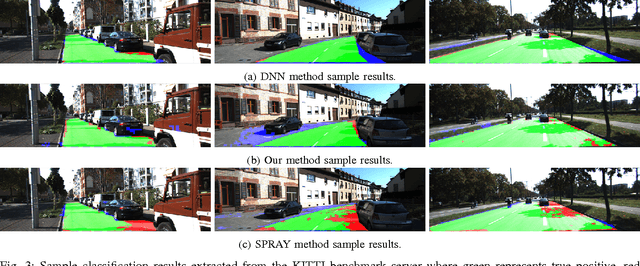
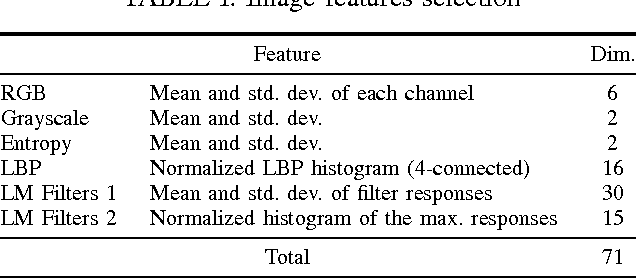
Vision-Based Road Detection using Contextual Blocks
Sep 03, 2015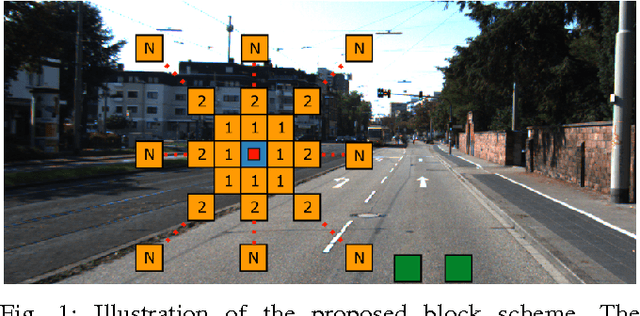
Road detection is a fundamental task in autonomous navigation systems. In this paper, we consider the case of monocular road detection, where images are segmented into road and non-road regions. Our starting point is the well-known machine learning approach, in which a classifier is trained to distinguish road and non-road regions based on hand-labeled images. We proceed by introducing the use of "contextual blocks" as an efficient way of providing contextual information to the classifier. Overall, the proposed methodology, including its image feature selection and classifier, was conceived with computational cost in mind, leaving room for optimized implementations. Regarding experiments, we perform a sensible evaluation of each phase and feature subset that composes our system. The results show a great benefit from using contextual blocks and demonstrate their computational efficiency. Finally, we submit our results to the KITTI road detection benchmark achieving scores comparable with state of the art methods.