 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJobBench: Aligning Agent Work With Human Will
May 25, 2026Current benchmarks for occupational AI agents are scoped primarily by economic values, telling a replacement story. We introduce JobBench, which evaluates AI agents on the workflows that experts identify as high-priority for delegation, empowering humans based on their needs instead of replacing them with GDP value. JobBench covers 130 agentic tasks across 35 occupations. Each task is packaged as a workspace of heterogeneous reference files, requiring the agent to reason through the cluttered information streams of real professional work. Outputs are graded by a fact-anchored chain of rubrics, averaging 35.6 binary criteria per task. We evaluate 36 models; the strongest, Claude Opus~4.7 under Claude Code, reaches only 45.9 %. We hope JobBench shifts the community's target labour-market effect from replacement to enhancement: building agents that do what humans actually want delegated, not only what is most economically valuable.
MapATM: Enhancing HD Map Construction through Actor Trajectory Modeling
Apr 13, 2026High-definition (HD) mapping tasks, which perform lane detections and predictions, are extremely challenging due to non-ideal conditions such as view occlusions, distant lane visibility, and adverse weather conditions. Those conditions often result in compromised lane detection accuracy and reduced reliability within autonomous driving systems. To address these challenges, we introduce MapATM, a novel deep neural network that effectively leverages historical actor trajectory information to improve lane detection accuracy, where actors refer to moving vehicles. By utilizing actor trajectories as structural priors for road geometry, MapATM achieves substantial performance enhancements, notably increasing AP by 4.6 for lane dividers and mAP by 2.6 on the challenging NuScenes dataset, representing relative improvements of 10.1% and 6.1%, respectively, compared to strong baseline methods. Extensive qualitative evaluations further demonstrate MapATM's capability to consistently maintain stable and robust map reconstruction across diverse and complex driving scenarios, underscoring its practical value for autonomous driving applications.
Nonlinear Dynamical Modeling of Human Intracranial Brain Activity with Flexible Inference
Dec 28, 2025Dynamical modeling of multisite human intracranial neural recordings is essential for developing neurotechnologies such as brain-computer interfaces (BCIs). Linear dynamical models are widely used for this purpose due to their interpretability and their suitability for BCIs. In particular, these models enable flexible real-time inference, even in the presence of missing neural samples, which often occur in wireless BCIs. However, neural activity can exhibit nonlinear structure that is not captured by linear models. Furthermore, while recurrent neural network models can capture nonlinearity, their inference does not directly address handling missing observations. To address this gap, recent work introduced DFINE, a deep learning framework that integrates neural networks with linear state-space models to capture nonlinearities while enabling flexible inference. However, DFINE was developed for intracortical recordings that measure localized neuronal populations. Here we extend DFINE to modeling of multisite human intracranial electroencephalography (iEEG) recordings. We find that DFINE significantly outperforms linear state-space models (LSSMs) in forecasting future neural activity. Furthermore, DFINE matches or exceeds the accuracy of a gated recurrent unit (GRU) model in neural forecasting, indicating that a linear dynamical backbone, when paired and jointly trained with nonlinear neural networks, can effectively describe the dynamics of iEEG signals while also enabling flexible inference. Additionally, DFINE handles missing observations more robustly than the baselines, demonstrating its flexible inference and utility for BCIs. Finally, DFINE's advantage over LSSM is more pronounced in high gamma spectral bands. Taken together, these findings highlight DFINE as a strong and flexible framework for modeling human iEEG dynamics, with potential applications in next-generation BCIs.
Panprediction: Optimal Predictions for Any Downstream Task and Loss
Oct 31, 2025Supervised learning is classically formulated as training a model to minimize a fixed loss function over a fixed distribution, or task. However, an emerging paradigm instead views model training as extracting enough information from data so that the model can be used to minimize many losses on many downstream tasks. We formalize a mathematical framework for this paradigm, which we call panprediction, and study its statistical complexity. Formally, panprediction generalizes omniprediction and sits upstream from multi-group learning, which respectively focus on predictions that generalize to many downstream losses or many downstream tasks, but not both. Concretely, we design algorithms that learn deterministic and randomized panpredictors with $\tilde{O}(1/\varepsilon^3)$ and $\tilde{O}(1/\varepsilon^2)$ samples, respectively. Our results demonstrate that under mild assumptions, simultaneously minimizing infinitely many losses on infinitely many tasks can be as statistically easy as minimizing one loss on one task. Along the way, we improve the best known sample complexity guarantee of deterministic omniprediction by a factor of $1/\varepsilon$, and match all other known sample complexity guarantees of omniprediction and multi-group learning. Our key technical ingredient is a nearly lossless reduction from panprediction to a statistically efficient notion of calibration, called step calibration.
Single Trajectory Conformal Prediction
Jun 03, 2024We study the performance of risk-controlling prediction sets (RCPS), an empirical risk minimization-based formulation of conformal prediction, with a single trajectory of temporally correlated data from an unknown stochastic dynamical system. First, we use the blocking technique to show that RCPS attains performance guarantees similar to those enjoyed in the iid setting whenever data is generated by asymptotically stationary and contractive dynamics. Next, we use the decoupling technique to characterize the graceful degradation in RCPS guarantees when the data generating process deviates from stationarity and contractivity. We conclude by discussing how these tools could be used toward a unified analysis of online and offline conformal prediction algorithms, which are currently treated with very different tools.
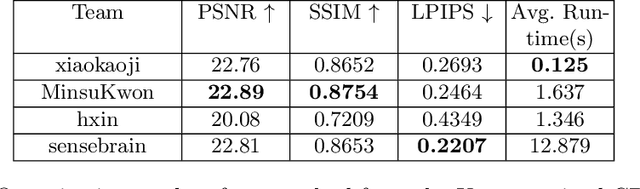
Realistic Bokeh Effect Rendering on Mobile GPUs, Mobile AI & AIM 2022 challenge: Report
Nov 07, 2022



As mobile cameras with compact optics are unable to produce a strong bokeh effect, lots of interest is now devoted to deep learning-based solutions for this task. In this Mobile AI challenge, the target was to develop an efficient end-to-end AI-based bokeh effect rendering approach that can run on modern smartphone GPUs using TensorFlow Lite. The participants were provided with a large-scale EBB! bokeh dataset consisting of 5K shallow / wide depth-of-field image pairs captured using the Canon 7D DSLR camera. The runtime of the resulting models was evaluated on the Kirin 9000's Mali GPU that provides excellent acceleration results for the majority of common deep learning ops. A detailed description of all models developed in this challenge is provided in this paper.
Bokeh-Loss GAN: Multi-Stage Adversarial Training for Realistic Edge-Aware Bokeh
Aug 25, 2022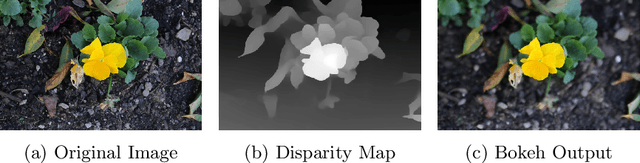
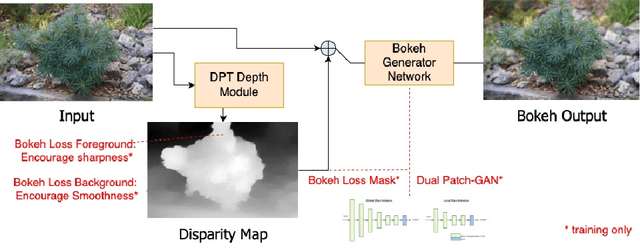
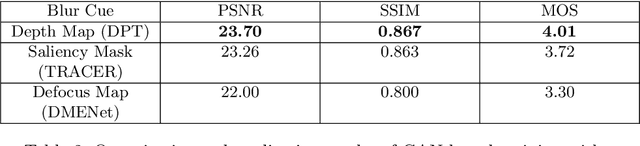
In this paper, we tackle the problem of monocular bokeh synthesis, where we attempt to render a shallow depth of field image from a single all-in-focus image. Unlike in DSLR cameras, this effect can not be captured directly in mobile cameras due to the physical constraints of the mobile aperture. We thus propose a network-based approach that is capable of rendering realistic monocular bokeh from single image inputs. To do this, we introduce three new edge-aware Bokeh Losses based on a predicted monocular depth map, that sharpens the foreground edges while blurring the background. This model is then finetuned using an adversarial loss to generate a realistic Bokeh effect. Experimental results show that our approach is capable of generating a pleasing, natural Bokeh effect with sharp edges while handling complicated scenes.
A Survey of Modern Deep Learning based Object Detection Models
May 12, 2021
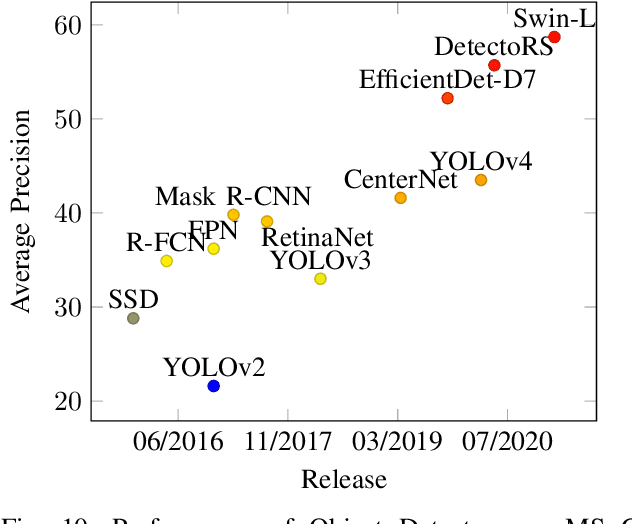
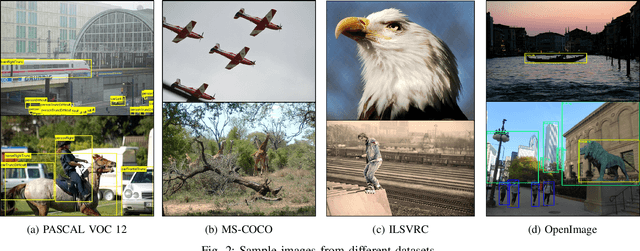

Object Detection is the task of classification and localization of objects in an image or video. It has gained prominence in recent years due to its widespread applications. This article surveys recent developments in deep learning based object detectors. Concise overview of benchmark datasets and evaluation metrics used in detection is also provided along with some of the prominent backbone architectures used in recognition tasks. It also covers contemporary lightweight classification models used on edge devices. Lastly, we compare the performances of these architectures on multiple metrics.
Blockchain for Multi-Robot Collaboration to Combat COVID-19 and Future Pandemics
Oct 05, 2020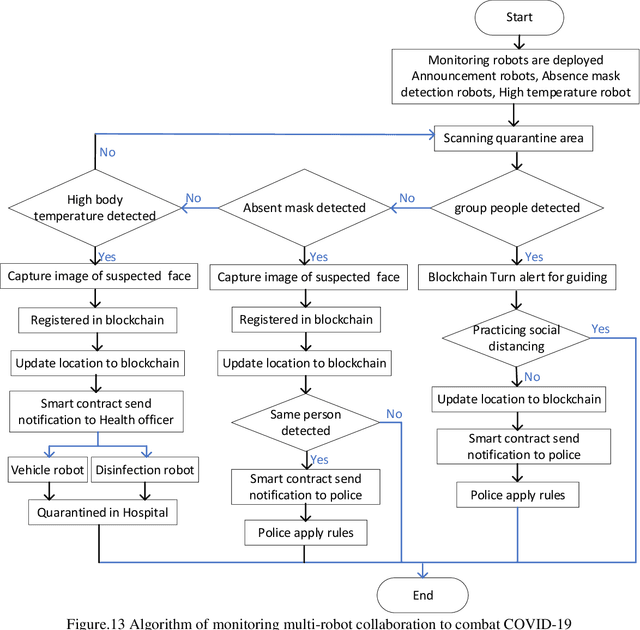
This conceptual paper overviews how blockchain technology is involving the operation of multi-robot collaboration for combating COVID-19 and future pandemics. Robots are a promising technology for providing many tasks such as spraying, disinfection, cleaning, treating, detecting high body temperature/mask absence, and delivering goods and medical supplies experiencing an epidemic COVID-19. For combating COVID-19, many heterogeneous and homogenous robots are required to perform different tasks for supporting different purposes in the quarantine area. Controlling and decentralizing multi-robot play a vital role in combating COVID-19 by reducing human interaction, monitoring, delivering goods. Blockchain technology can manage multi-robot collaboration in a decentralized fashion, improve the interaction among them to exchange information, share representation, share goals, and trust. We highlight the challenges and provide the tactical solutions enabled by integrating blockchain and multi-robot collaboration to combat COVID-19 pandemic. The framework of our conceptual proposed can increase the intelligence, decentralization, and autonomous operations of connected multi-robot collaboration in the blockchain network. We overview blockchain potential benefits to defining a framework of multi-robot collaboration applications to combat COVID-19 epidemics such as monitoring and outdoor and hospital End to End (E2E) delivery systems. Furthermore, we discuss the challenges and opportunities of integrated blockchain, multi-robot collaboration, and the Internet of Things (IoT) for combating COVID-19 and future pandemics.