 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of Modern Deep Learning based Object Detection Models
May 12, 2021
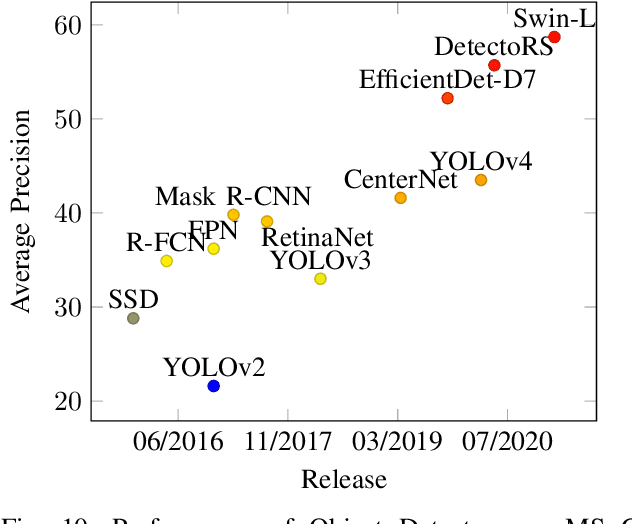
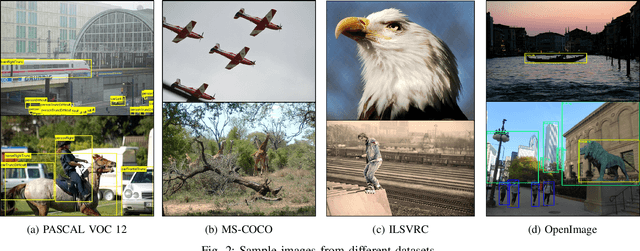

Object Detection is the task of classification and localization of objects in an image or video. It has gained prominence in recent years due to its widespread applications. This article surveys recent developments in deep learning based object detectors. Concise overview of benchmark datasets and evaluation metrics used in detection is also provided along with some of the prominent backbone architectures used in recognition tasks. It also covers contemporary lightweight classification models used on edge devices. Lastly, we compare the performances of these architectures on multiple metrics.
A Fuzzy Brute Force Matching Method for Binary Image Features
Apr 20, 2017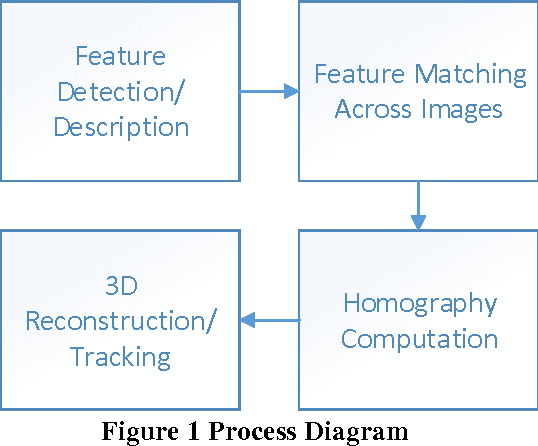
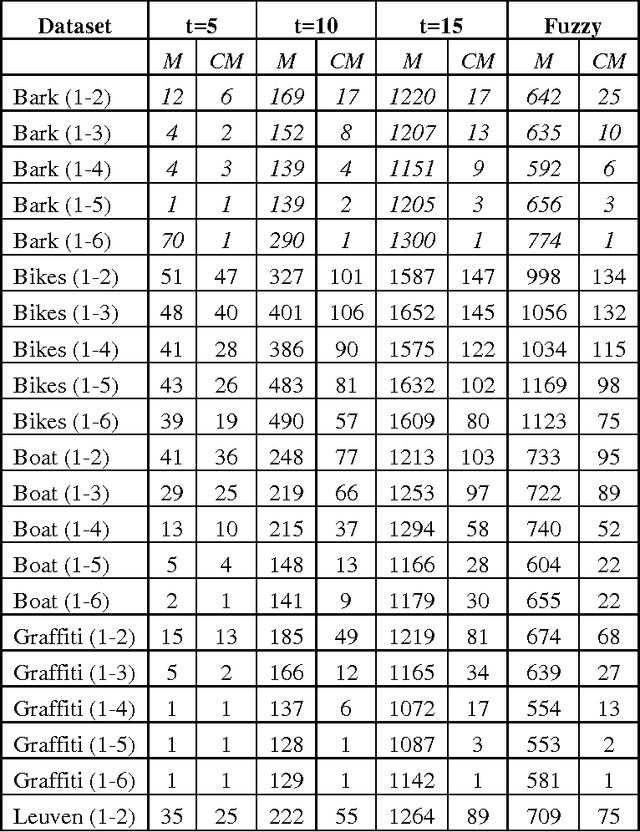
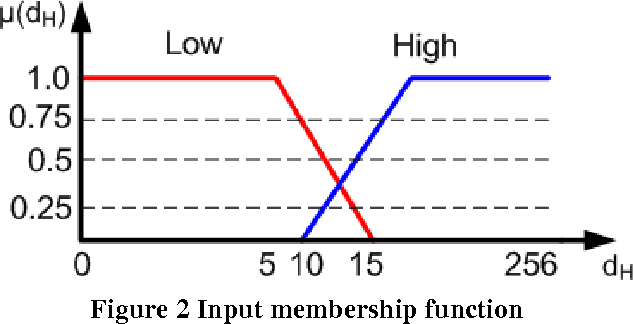
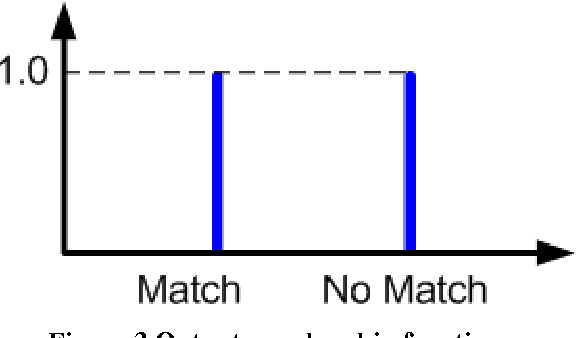
Matching of binary image features is an important step in many different computer vision applications. Conventionally, an arbitrary threshold is used to identify a correct match from incorrect matches using Hamming distance which may improve or degrade the matching results for different input images. This is mainly due to the image content which is affected by the scene, lighting and imaging conditions. This paper presents a fuzzy logic based approach for brute force matching of image features to overcome this situation. The method was tested using a well-known image database with known ground truth. The approach is shown to produce a higher number of correct matches when compared against constant distance thresholds. The nature of fuzzy logic which allows the vagueness of information and tolerance to errors has been successfully exploited in an image processing context. The uncertainty arising from the imaging conditions has been overcome with the use of compact fuzzy matching membership functions.
Comparative Study of Instance Based Learning and Back Propagation for Classification Problems
Apr 19, 2016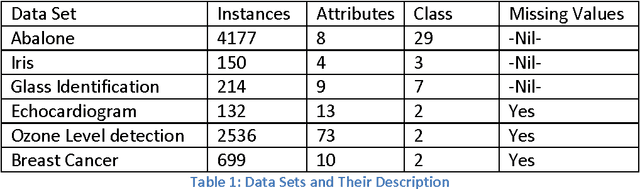
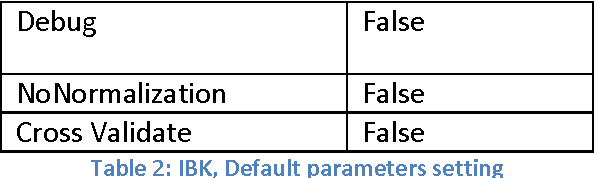
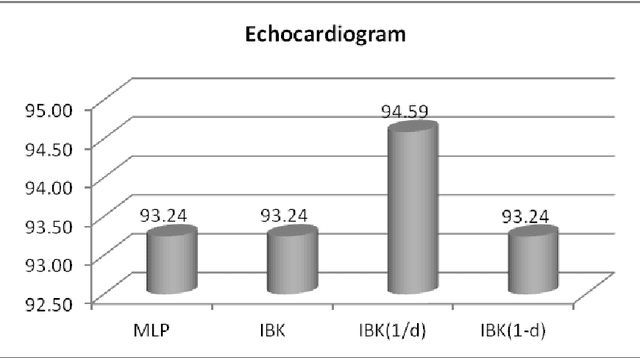
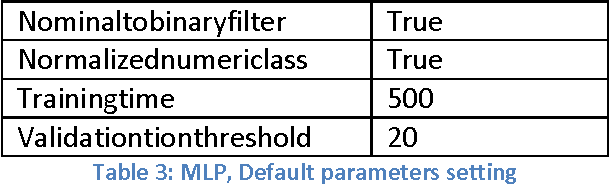
The paper presents a comparative study of the performance of Back Propagation and Instance Based Learning Algorithm for classification tasks. The study is carried out by a series of experiments will all possible combinations of parameter values for the algorithms under evaluation. The algorithm's classification accuracy is compared over a range of datasets and measurements like Cross Validation, Kappa Statistics, Root Mean Squared Value and True Positive vs False Positive rate have been used to evaluate their performance. Along with performance comparison, techniques of handling missing values have also been compared that include Mean or Mode replacement and Multiple Imputation. The results showed that parameter adjustment plays vital role in improving an algorithm's accuracy and therefore, Back Propagation has shown better results as compared to Instance Based Learning. Furthermore, the problem of missing values was better handled by Multiple imputation method, however, not suitable for less amount of data.
Sensor Fusion of Camera, GPS and IMU using Fuzzy Adaptive Multiple Motion Models
Dec 09, 2015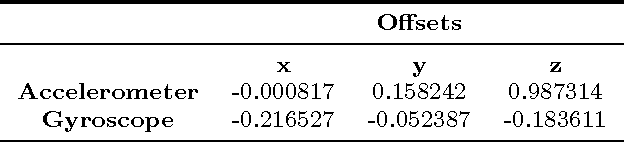
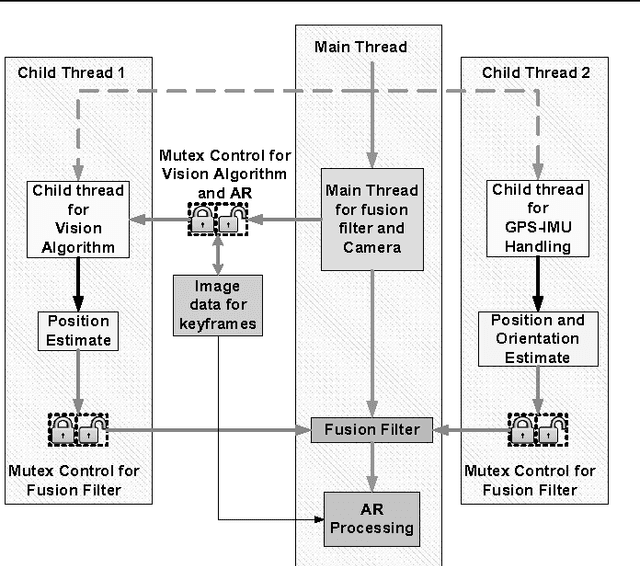
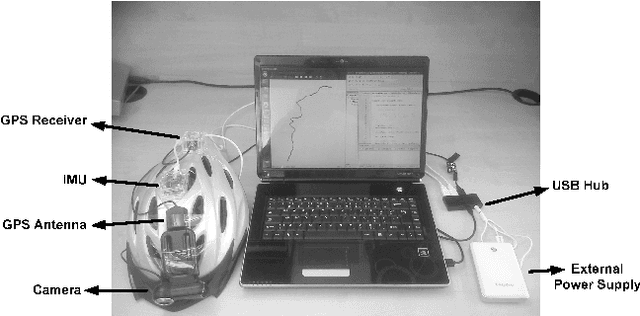
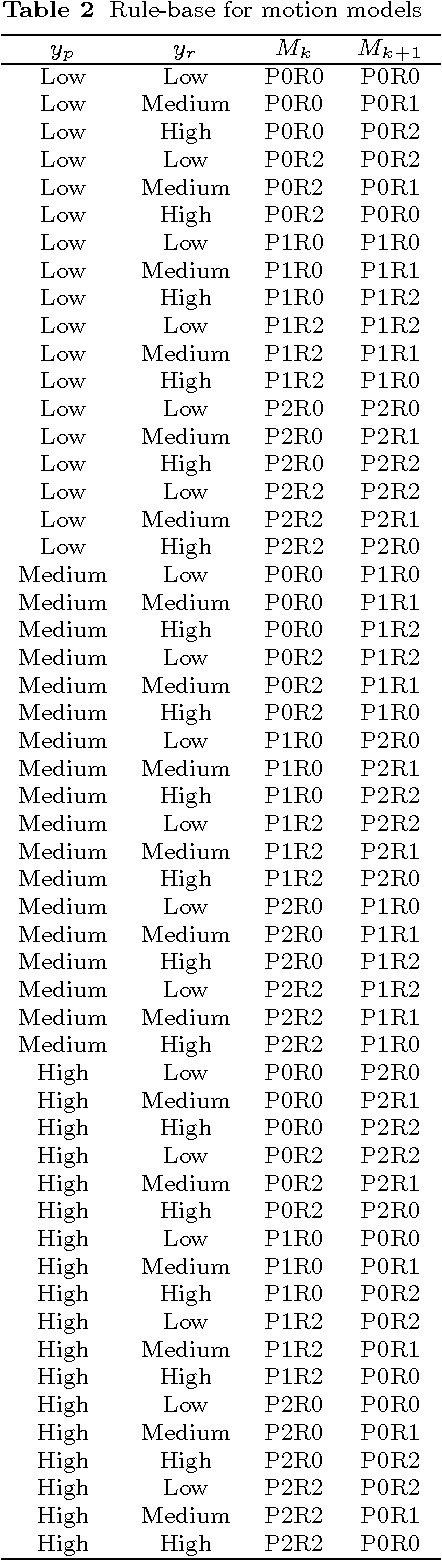
A tracking system that will be used for Augmented Reality (AR) applications has two main requirements: accuracy and frame rate. The first requirement is related to the performance of the pose estimation algorithm and how accurately the tracking system can find the position and orientation of the user in the environment. Accuracy problems of current tracking devices, considering that they are low-cost devices, cause static errors during this motion estimation process. The second requirement is related to dynamic errors (the end-to-end system delay; occurring because of the delay in estimating the motion of the user and displaying images based on this estimate. This paper investigates combining the vision-based estimates with measurements from other sensors, GPS and IMU, in order to improve the tracking accuracy in outdoor environments. The idea of using Fuzzy Adaptive Multiple Models (FAMM) was investigated using a novel fuzzy rule-based approach to decide on the model that results in improved accuracy and faster convergence for the fusion filter. Results show that the developed tracking system is more accurate than a conventional GPS-IMU fusion approach due to additional estimates from a camera and fuzzy motion models. The paper also presents an application in cultural heritage context.
Memory-Efficient Design Strategy for a Parallel Embedded Integral Image Computation Engine
Oct 17, 2015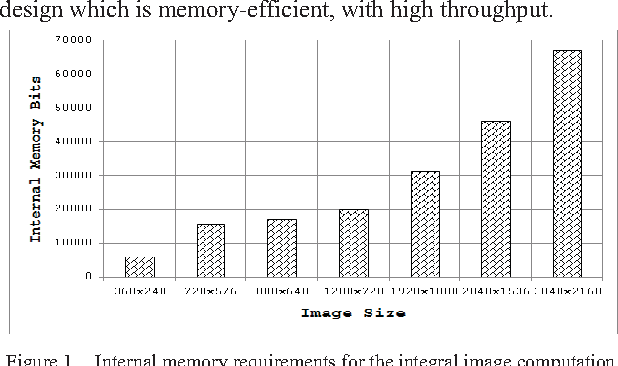
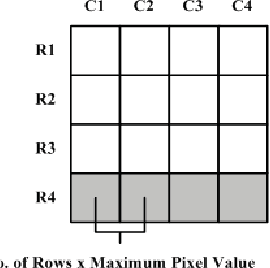
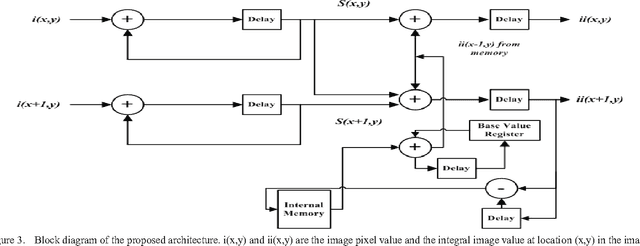
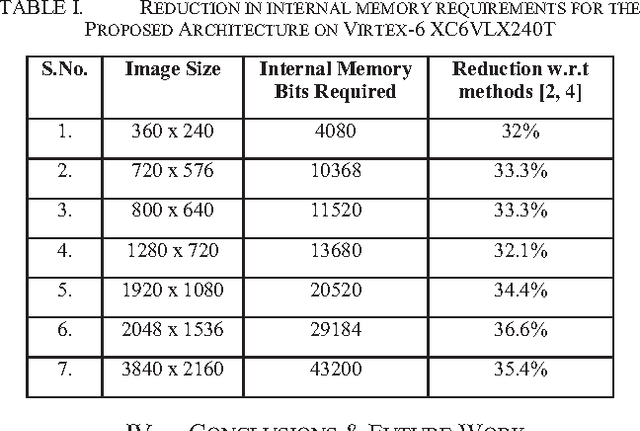
In embedded vision systems, parallel computation of the integral image presents several design challenges in terms of hardware resources, speed and power consumption. Although recursive equations significantly reduce the number of operations for computing the integral image, the required internal memory becomes prohibitively large for an embedded integral image computation engine for increasing image sizes. With the objective of achieving high-throughput with minimum hardware resources, this paper proposes a memory-efficient design strategy for a parallel embedded integral image computation engine. Results show that the design achieves nearly 35% reduction in memory for common HD video.
Improved repeatability measures for evaluating performance of feature detectors
Apr 29, 2015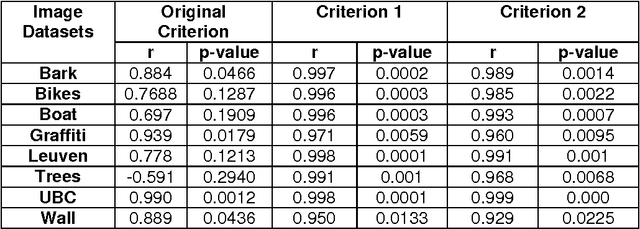
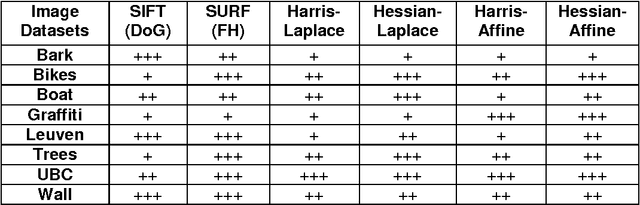
The most frequently employed measure for performance characterisation of local feature detectors is repeatability, but it has been observed that this does not necessarily mirror actual performance. Presented are improved repeatability formulations which correlate much better with the true performance of feature detectors. Comparative results for several state-of-the-art feature detectors are presented using these measures; it is found that Hessian-based detectors are generally superior at identifying features when images are subject to various geometric and photometric transformations.