 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Fuzzy Brute Force Matching Method for Binary Image Features
Apr 20, 2017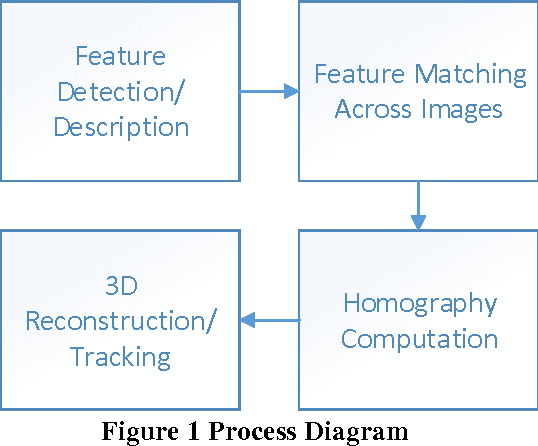
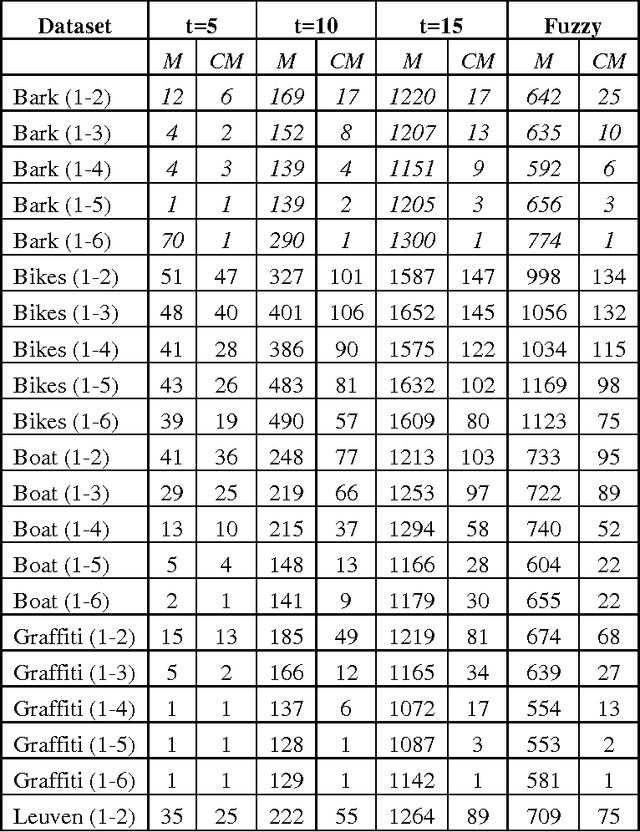
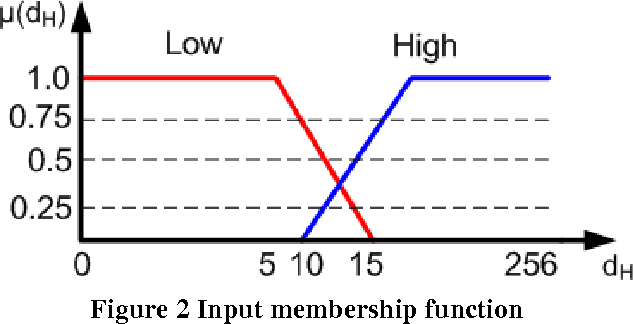
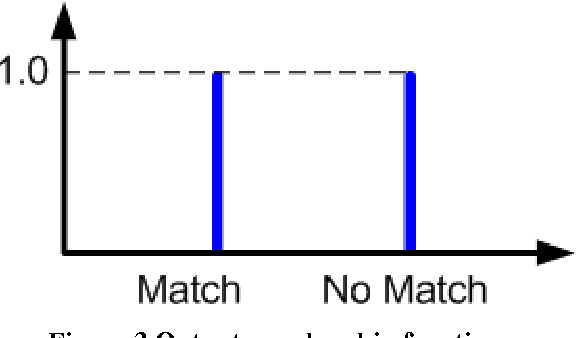
Matching of binary image features is an important step in many different computer vision applications. Conventionally, an arbitrary threshold is used to identify a correct match from incorrect matches using Hamming distance which may improve or degrade the matching results for different input images. This is mainly due to the image content which is affected by the scene, lighting and imaging conditions. This paper presents a fuzzy logic based approach for brute force matching of image features to overcome this situation. The method was tested using a well-known image database with known ground truth. The approach is shown to produce a higher number of correct matches when compared against constant distance thresholds. The nature of fuzzy logic which allows the vagueness of information and tolerance to errors has been successfully exploited in an image processing context. The uncertainty arising from the imaging conditions has been overcome with the use of compact fuzzy matching membership functions.
Sensor Fusion of Camera, GPS and IMU using Fuzzy Adaptive Multiple Motion Models
Dec 09, 2015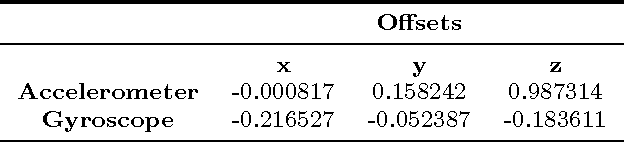
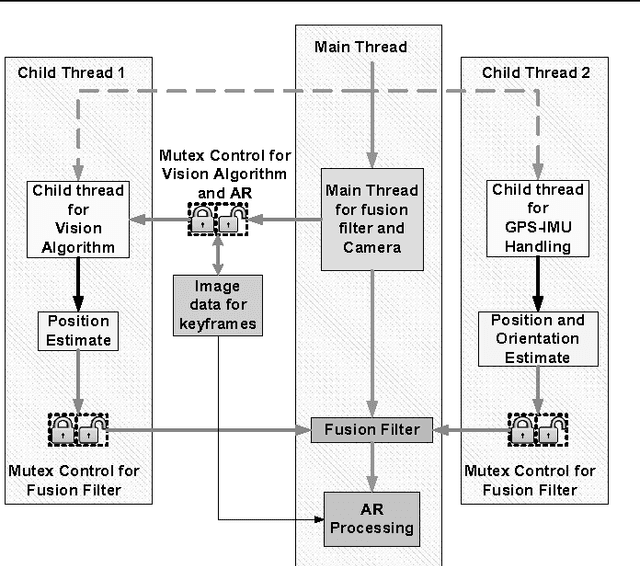
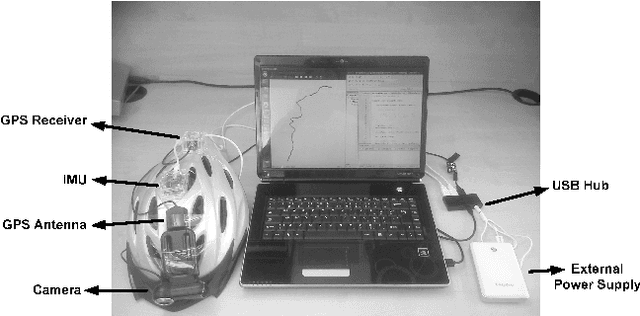
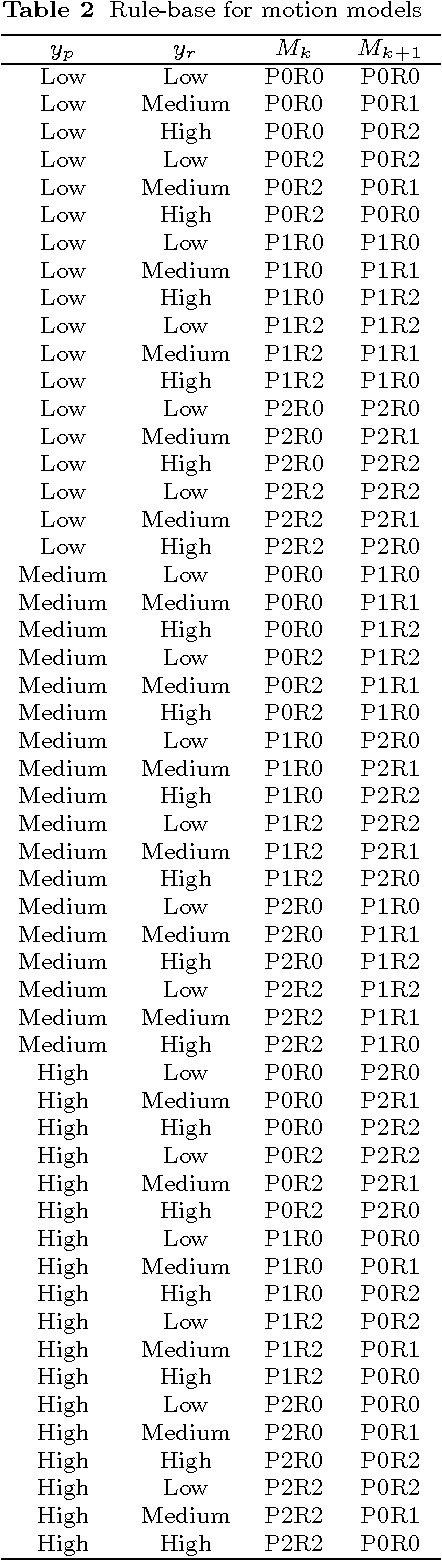
A tracking system that will be used for Augmented Reality (AR) applications has two main requirements: accuracy and frame rate. The first requirement is related to the performance of the pose estimation algorithm and how accurately the tracking system can find the position and orientation of the user in the environment. Accuracy problems of current tracking devices, considering that they are low-cost devices, cause static errors during this motion estimation process. The second requirement is related to dynamic errors (the end-to-end system delay; occurring because of the delay in estimating the motion of the user and displaying images based on this estimate. This paper investigates combining the vision-based estimates with measurements from other sensors, GPS and IMU, in order to improve the tracking accuracy in outdoor environments. The idea of using Fuzzy Adaptive Multiple Models (FAMM) was investigated using a novel fuzzy rule-based approach to decide on the model that results in improved accuracy and faster convergence for the fusion filter. Results show that the developed tracking system is more accurate than a conventional GPS-IMU fusion approach due to additional estimates from a camera and fuzzy motion models. The paper also presents an application in cultural heritage context.