 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeterogeneous Autoencoder Empowered by Quadratic Neurons
Apr 02, 2022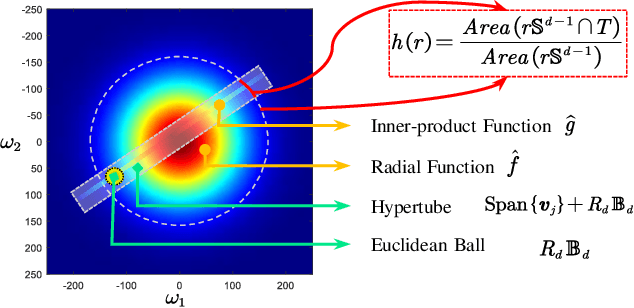
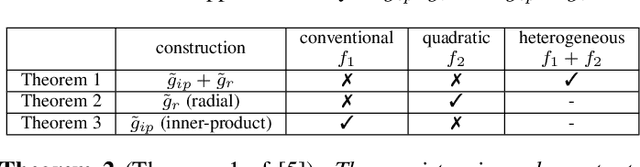

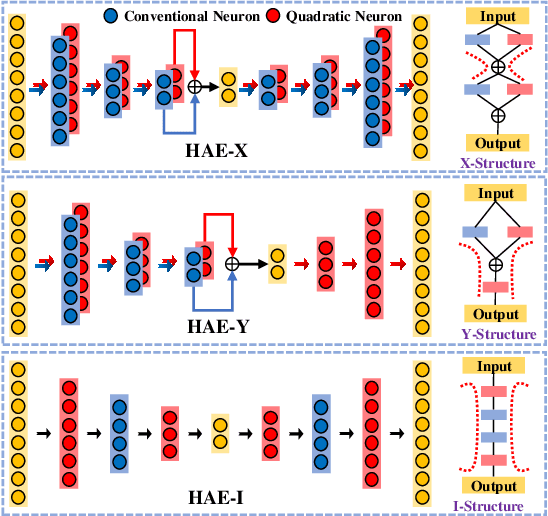
Inspired by the complexity and diversity of biological neurons, a quadratic neuron is proposed to replace the inner product in the current neuron with a simplified quadratic function. Employing such a novel type of neurons offers a new perspective on developing deep learning. When analyzing quadratic neurons, we find that there exists a function such that a heterogeneous network can approximate it well with a polynomial number of neurons but a purely conventional or quadratic network needs an exponential number of neurons to achieve the same level of error. Encouraged by this inspiring theoretical result on heterogeneous networks, we directly integrate conventional and quadratic neurons in an autoencoder to make a new type of heterogeneous autoencoders. Anomaly detection experiments confirm that heterogeneous autoencoders perform competitively compared to other state-of-the-art models.
Manifoldron: Direct Space Partition via Manifold Discovery
Jan 14, 2022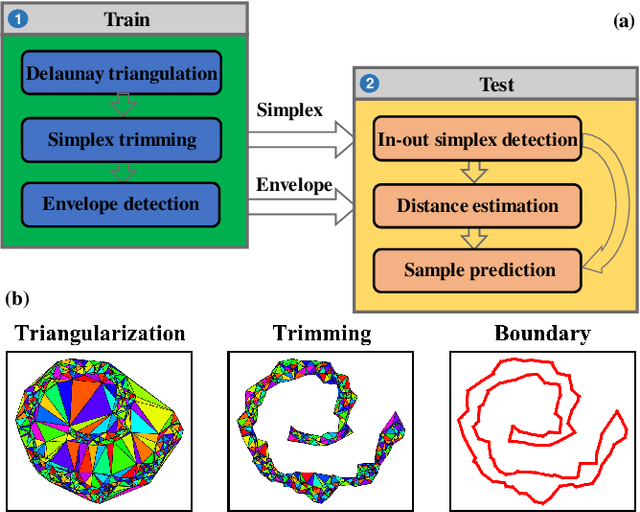
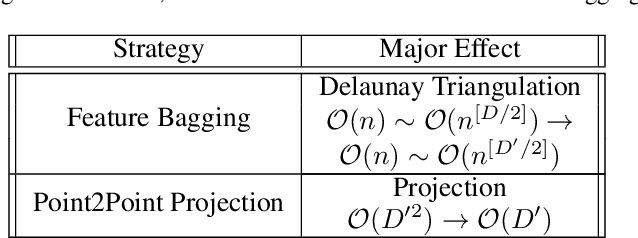
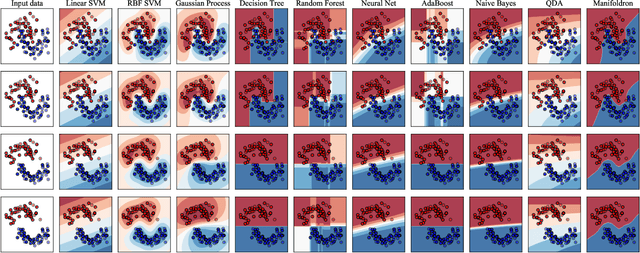
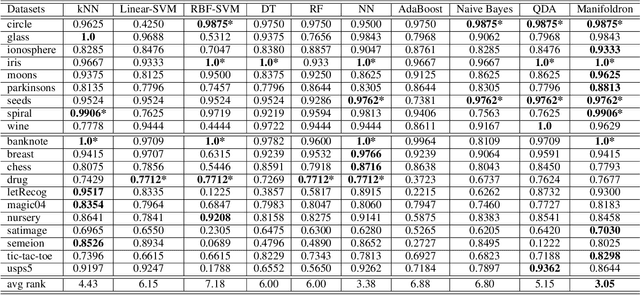
A neural network with the widely-used ReLU activation has been shown to partition the sample space into many convex polytopes for prediction. However, the parameterized way a neural network and other machine learning models use to partition the space has imperfections, e.g., the compromised interpretability for complex models, the inflexibility in decision boundary construction due to the generic character of the model, and the risk of being trapped into shortcut solutions. In contrast, although the non-parameterized models can adorably avoid or downplay these issues, they are usually insufficiently powerful either due to over-simplification or the failure to accommodate the manifold structures of data. In this context, we first propose a new type of machine learning models referred to as Manifoldron that directly derives decision boundaries from data and partitions the space via manifold structure discovery. Then, we systematically analyze the key characteristics of the Manifoldron including interpretability, manifold characterization capability, and its link to neural networks. The experimental results on 9 small and 11 large datasets demonstrate that the proposed Manifoldron performs competitively compared to the mainstream machine learning models. We have shared our code https://github.com/wdayang/Manifoldron for free download and evaluation.
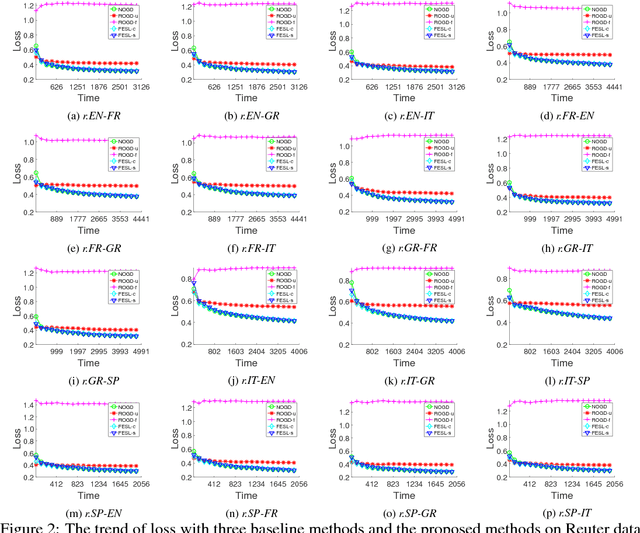
Storage Fit Learning with Feature Evolvable Streams
Jul 22, 2020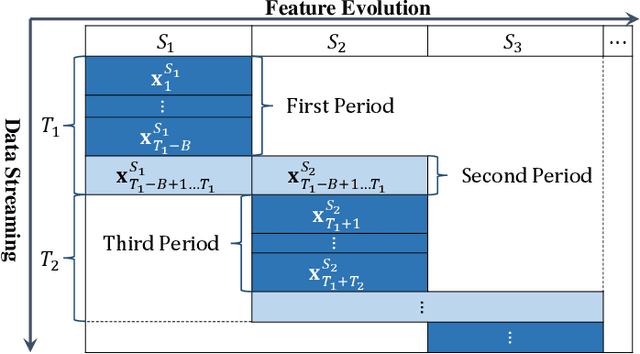
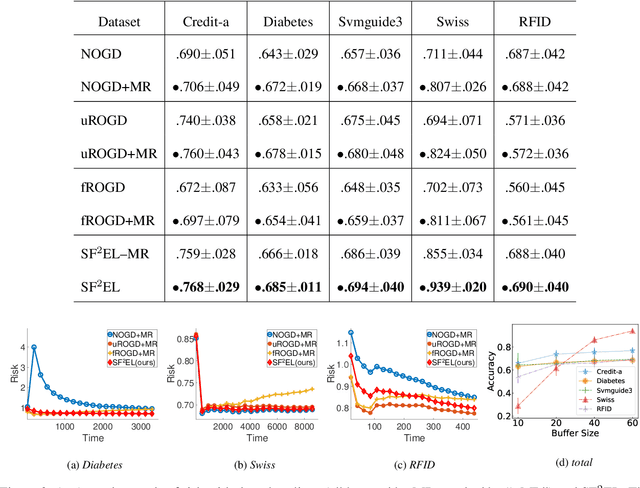
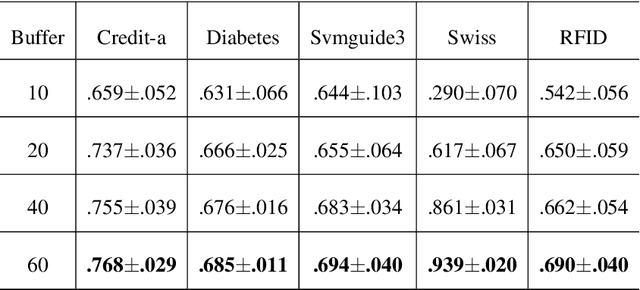
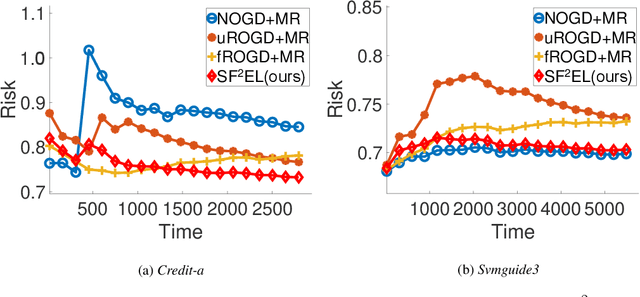
Feature evolvable learning has been widely studied in recent years where old features will vanish and new features will emerge when learning with streams. Conventional methods usually assume that a label will be revealed after prediction at each time step. However, in practice, this assumption may not hold whereas no label will be given at most time steps. To tackle this problem, we leverage the technique of manifold regularization to utilize the previous similar data to assist the refinement of the online model. Nevertheless, this approach needs to store all previous data which is impossible in learning with streams that arrive sequentially in large volume. Thus we need a buffer to store part of them. Considering that different devices may have different storage budgets, the learning approaches should be flexible subject to the storage budget limit. In this paper, we propose a new setting: Storage-Fit Feature-Evolvable streaming Learning (SF2EL) which incorporates the issue of rarely-provided labels into feature evolution. Our framework is able to fit its behavior to different storage budgets when learning with feature evolvable streams with unlabeled data. Besides, both theoretical and empirical results validate that our approach can preserve the merit of the original feature evolvable learning i.e., can always track the best baseline and thus perform well at any time step.
Prediction with Unpredictable Feature Evolution
Apr 27, 2019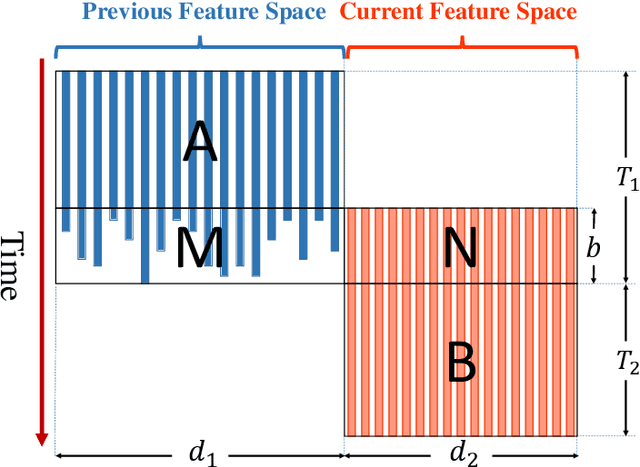
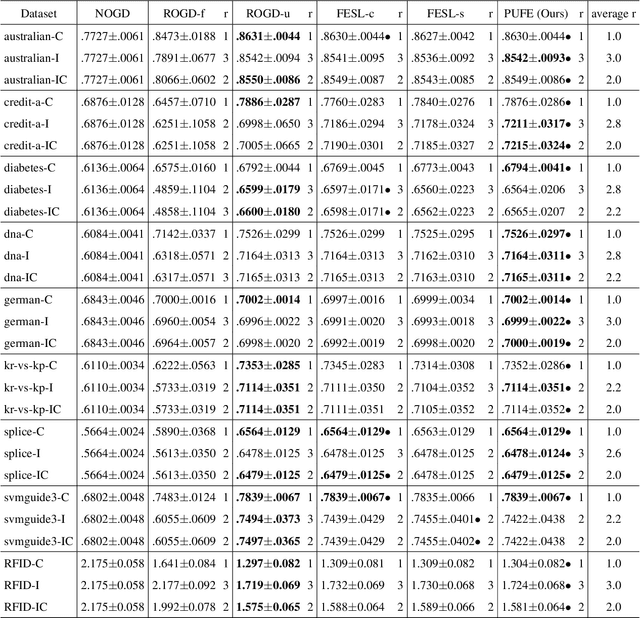
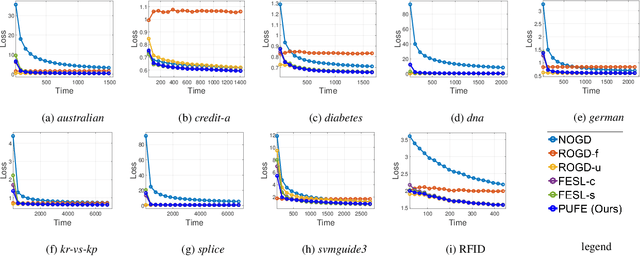
Feature space can change or evolve when learning with streaming data. Several recent works have studied feature evolvable learning. They usually assume that features would not vanish or appear in an arbitrary way. For example, when knowing the battery lifespan, old features and new features represented by data gathered by sensors will disappear and emerge at the same time along with the sensors exchanging simultaneously. However, different sensors would have different lifespans, and thus the feature evolution can be unpredictable. In this paper, we propose a novel paradigm: Prediction with Unpredictable Feature Evolution (PUFE). We first complete the unpredictable overlapping period into an organized matrix and give a theoretical bound on the least number of observed entries. Then we learn the mapping from the completed matrix to recover the data from old feature space when observing the data from new feature space. With predictions on the recovered data, our model can make use of the advantage of old feature space and is always comparable with any combinations of the predictions on the current instance. Experiments on the synthetic and real datasets validate the effectiveness of our method.
Learning with Interpretable Structure from RNN
Oct 25, 2018



In structure learning, the output is generally a structure that is used as supervision information to achieve good performance. Considering the interpretation of deep learning models has raised extended attention these years, it will be beneficial if we can learn an interpretable structure from deep learning models. In this paper, we focus on Recurrent Neural Networks (RNNs) whose inner mechanism is still not clearly understood. We find that Finite State Automaton (FSA) that processes sequential data has more interpretable inner mechanism and can be learned from RNNs as the interpretable structure. We propose two methods to learn FSA from RNN based on two different clustering methods. We first give the graphical illustration of FSA for human beings to follow, which shows the interpretability. From the FSA's point of view, we then analyze how the performance of RNNs are affected by the number of gates, as well as the semantic meaning behind the transition of numerical hidden states. Our results suggest that RNNs with simple gated structure such as Minimal Gated Unit (MGU) is more desirable and the transitions in FSA leading to specific classification result are associated with corresponding words which are understandable by human beings.
Learning with Feature Evolvable Streams
Jan 08, 2018
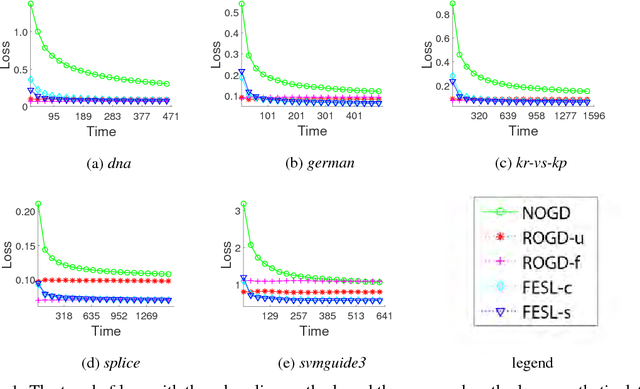
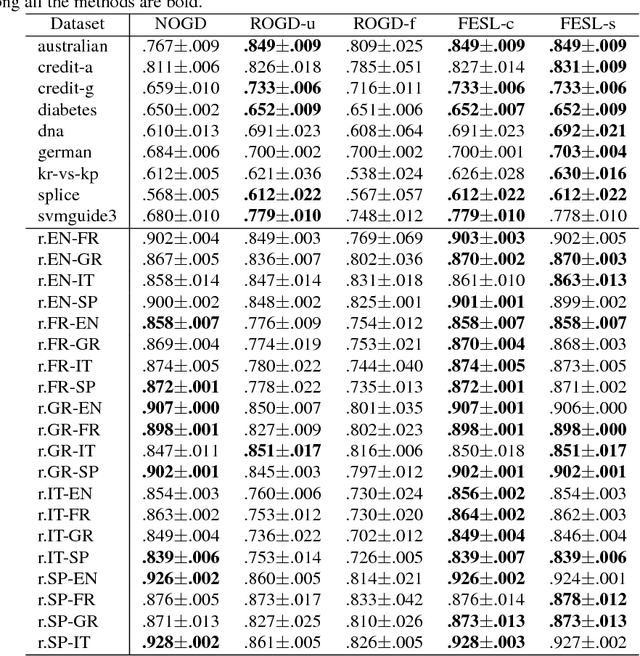
Learning with streaming data has attracted much attention during the past few years. Though most studies consider data stream with fixed features, in real practice the features may be evolvable. For example, features of data gathered by limited-lifespan sensors will change when these sensors are substituted by new ones. In this paper, we propose a novel learning paradigm: \emph{Feature Evolvable Streaming Learning} where old features would vanish and new features would occur. Rather than relying on only the current features, we attempt to recover the vanished features and exploit it to improve performance. Specifically, we learn two models from the recovered features and the current features, respectively. To benefit from the recovered features, we develop two ensemble methods. In the first method, we combine the predictions from two models and theoretically show that with the assistance of old features, the performance on new features can be improved. In the second approach, we dynamically select the best single prediction and establish a better performance guarantee when the best model switches. Experiments on both synthetic and real data validate the effectiveness of our proposal.