 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Delicate Local Representations for Multi-Person Pose Estimation
Mar 10, 2020
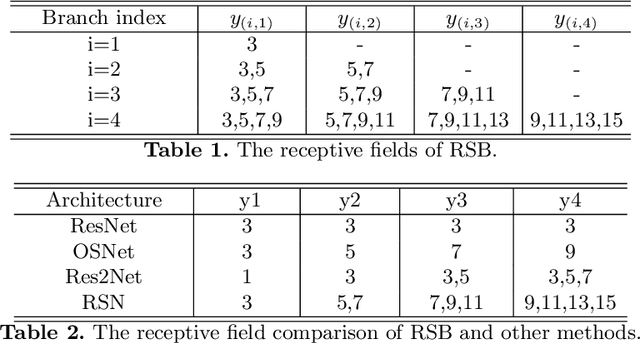
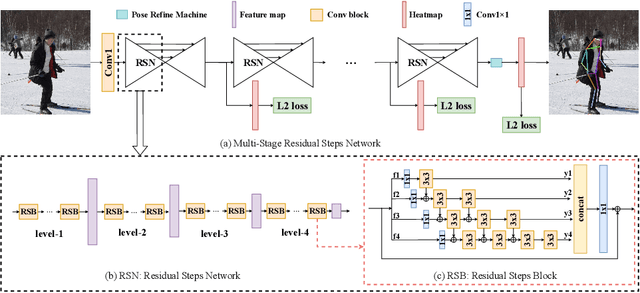
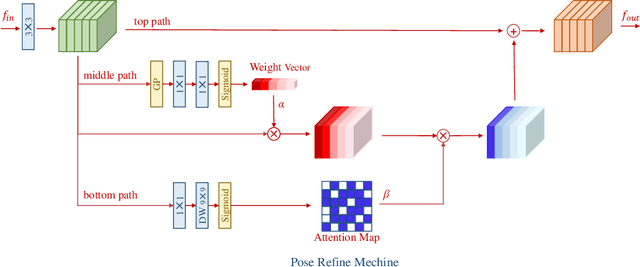
In this paper, we propose a novel method called Residual Steps Network (RSN). RSN aggregates features with the same spatialsize (Intra-level features) efficiently to obtain delicate local representations, which retain rich low-level spatial information and result in pre-cise keypoint localization. In addition, we propose an efficient attention mechanism - Pose Refine Machine (PRM) to further refine the keypointlocations. Our approach won the 1st place of COCO Keypoint Challenge 2019 and achieves state-of-the-art results on both COCO and MPII benchmarks, without using extra training data and pretrained model. Our single model achieves 78.6 on COCO test-dev, 93.0 on MPII test dataset. Ensembled models achieve 79.2 on COCO test-dev, 77.1 on COCO test-challenge dataset. The source code is publicly available for further research at https://github.com/caiyuanhao1998/RSN
Rethinking on Multi-Stage Networks for Human Pose Estimation
Jan 08, 2019
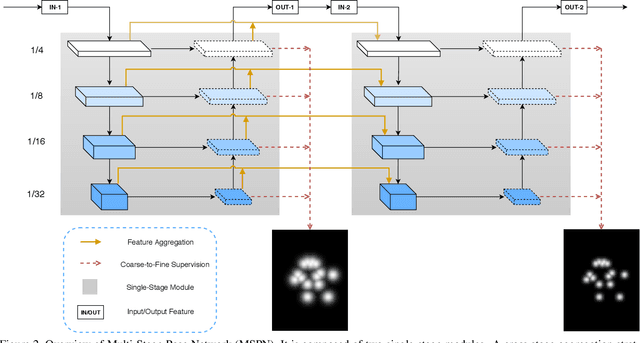
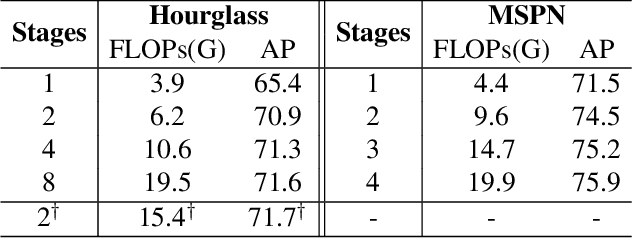
Existing pose estimation approaches can be categorized into single-stage and multi-stage methods. While a multi-stage architecture is seemingly more suitable for the task, the performance of current multi-stage methods is not as competitive as single-stage ones. This work studies this issue. We argue that the current unsatisfactory performance comes from various insufficient design in current methods. We propose several improvements on the architecture design, feature flow, and loss function. The resulting multi-stage network outperforms all previous works and obtains the best performance on COCO keypoint challenge 2018. The source code will be released.