 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantization-Aware Distillation for NVFP4 Inference Accuracy Recovery
Jan 27, 2026This technical report presents quantization-aware distillation (QAD) and our best practices for recovering accuracy of NVFP4-quantized large language models (LLMs) and vision-language models (VLMs). QAD distills a full-precision teacher model into a quantized student model using a KL divergence loss. While applying distillation to quantized models is not a new idea, we observe key advantages of QAD for today's LLMs: 1. It shows remarkable effectiveness and stability for models trained through multi-stage post-training pipelines, including supervised fine-tuning (SFT), reinforcement learning (RL), and model merging, where traditional quantization-aware training (QAT) suffers from engineering complexity and training instability; 2. It is robust to data quality and coverage, enabling accuracy recovery without full training data. We evaluate QAD across multiple post-trained models including AceReason Nemotron, Nemotron 3 Nano, Nemotron Nano V2, Nemotron Nano V2 VL (VLM), and Llama Nemotron Super v1, showing consistent recovery to near-BF16 accuracy.
NVIDIA Nemotron 3: Efficient and Open Intelligence
Dec 24, 2025We introduce the Nemotron 3 family of models - Nano, Super, and Ultra. These models deliver strong agentic, reasoning, and conversational capabilities. The Nemotron 3 family uses a Mixture-of-Experts hybrid Mamba-Transformer architecture to provide best-in-class throughput and context lengths of up to 1M tokens. Super and Ultra models are trained with NVFP4 and incorporate LatentMoE, a novel approach that improves model quality. The two larger models also include MTP layers for faster text generation. All Nemotron 3 models are post-trained using multi-environment reinforcement learning enabling reasoning, multi-step tool use, and support granular reasoning budget control. Nano, the smallest model, outperforms comparable models in accuracy while remaining extremely cost-efficient for inference. Super is optimized for collaborative agents and high-volume workloads such as IT ticket automation. Ultra, the largest model, provides state-of-the-art accuracy and reasoning performance. Nano is released together with its technical report and this white paper, while Super and Ultra will follow in the coming months. We will openly release the model weights, pre- and post-training software, recipes, and all data for which we hold redistribution rights.
Nemotron 3 Nano: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Dec 23, 2025We present Nemotron 3 Nano 30B-A3B, a Mixture-of-Experts hybrid Mamba-Transformer language model. Nemotron 3 Nano was pretrained on 25 trillion text tokens, including more than 3 trillion new unique tokens over Nemotron 2, followed by supervised fine tuning and large-scale RL on diverse environments. Nemotron 3 Nano achieves better accuracy than our previous generation Nemotron 2 Nano while activating less than half of the parameters per forward pass. It achieves up to 3.3x higher inference throughput than similarly-sized open models like GPT-OSS-20B and Qwen3-30B-A3B-Thinking-2507, while also being more accurate on popular benchmarks. Nemotron 3 Nano demonstrates enhanced agentic, reasoning, and chat abilities and supports context lengths up to 1M tokens. We release both our pretrained Nemotron 3 Nano 30B-A3B Base and post-trained Nemotron 3 Nano 30B-A3B checkpoints on Hugging Face.
NVIDIA Nemotron Nano V2 VL
Nov 07, 2025We introduce Nemotron Nano V2 VL, the latest model of the Nemotron vision-language series designed for strong real-world document understanding, long video comprehension, and reasoning tasks. Nemotron Nano V2 VL delivers significant improvements over our previous model, Llama-3.1-Nemotron-Nano-VL-8B, across all vision and text domains through major enhancements in model architecture, datasets, and training recipes. Nemotron Nano V2 VL builds on Nemotron Nano V2, a hybrid Mamba-Transformer LLM, and innovative token reduction techniques to achieve higher inference throughput in long document and video scenarios. We are releasing model checkpoints in BF16, FP8, and FP4 formats and sharing large parts of our datasets, recipes and training code.
NVIDIA Nemotron Nano 2: An Accurate and Efficient Hybrid Mamba-Transformer Reasoning Model
Aug 21, 2025



We introduce Nemotron-Nano-9B-v2, a hybrid Mamba-Transformer language model designed to increase throughput for reasoning workloads while achieving state-of-the-art accuracy compared to similarly-sized models. Nemotron-Nano-9B-v2 builds on the Nemotron-H architecture, in which the majority of the self-attention layers in the common Transformer architecture are replaced with Mamba-2 layers, to achieve improved inference speed when generating the long thinking traces needed for reasoning. We create Nemotron-Nano-9B-v2 by first pre-training a 12-billion-parameter model (Nemotron-Nano-12B-v2-Base) on 20 trillion tokens using an FP8 training recipe. After aligning Nemotron-Nano-12B-v2-Base, we employ the Minitron strategy to compress and distill the model with the goal of enabling inference on up to 128k tokens on a single NVIDIA A10G GPU (22GiB of memory, bfloat16 precision). Compared to existing similarly-sized models (e.g., Qwen3-8B), we show that Nemotron-Nano-9B-v2 achieves on-par or better accuracy on reasoning benchmarks while achieving up to 6x higher inference throughput in reasoning settings like 8k input and 16k output tokens. We are releasing Nemotron-Nano-9B-v2, Nemotron-Nano12B-v2-Base, and Nemotron-Nano-9B-v2-Base checkpoints along with the majority of our pre- and post-training datasets on Hugging Face.
Llama-Nemotron: Efficient Reasoning Models
May 02, 2025



We introduce the Llama-Nemotron series of models, an open family of heterogeneous reasoning models that deliver exceptional reasoning capabilities, inference efficiency, and an open license for enterprise use. The family comes in three sizes -- Nano (8B), Super (49B), and Ultra (253B) -- and performs competitively with state-of-the-art reasoning models such as DeepSeek-R1 while offering superior inference throughput and memory efficiency. In this report, we discuss the training procedure for these models, which entails using neural architecture search from Llama 3 models for accelerated inference, knowledge distillation, and continued pretraining, followed by a reasoning-focused post-training stage consisting of two main parts: supervised fine-tuning and large scale reinforcement learning. Llama-Nemotron models are the first open-source models to support a dynamic reasoning toggle, allowing users to switch between standard chat and reasoning modes during inference. To further support open research and facilitate model development, we provide the following resources: 1. We release the Llama-Nemotron reasoning models -- LN-Nano, LN-Super, and LN-Ultra -- under the commercially permissive NVIDIA Open Model License Agreement. 2. We release the complete post-training dataset: Llama-Nemotron-Post-Training-Dataset. 3. We also release our training codebases: NeMo, NeMo-Aligner, and Megatron-LM.
PredictionNet: Real-Time Joint Probabilistic Traffic Prediction for Planning, Control, and Simulation
Sep 23, 2021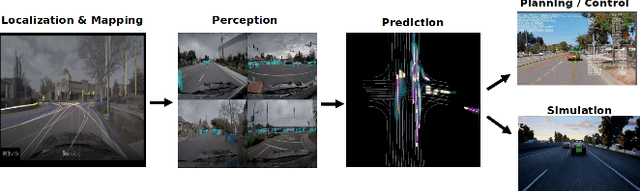
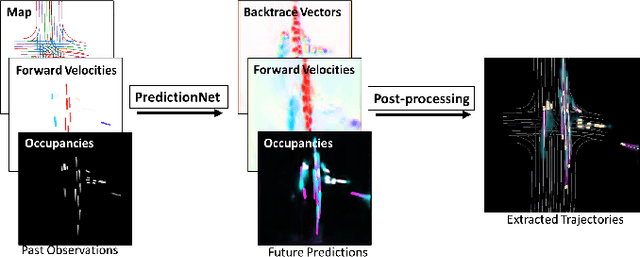
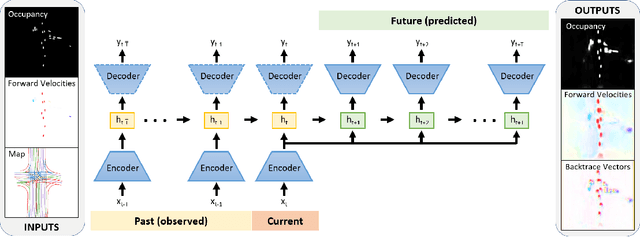
Predicting the future motion of traffic agents is crucial for safe and efficient autonomous driving. To this end, we present PredictionNet, a deep neural network (DNN) that predicts the motion of all surrounding traffic agents together with the ego-vehicle's motion. All predictions are probabilistic and are represented in a simple top-down rasterization that allows an arbitrary number of agents. Conditioned on a multilayer map with lane information, the network outputs future positions, velocities, and backtrace vectors jointly for all agents including the ego-vehicle in a single pass. Trajectories are then extracted from the output. The network can be used to simulate realistic traffic, and it produces competitive results on popular benchmarks. More importantly, it has been used to successfully control a real-world vehicle for hundreds of kilometers, by combining it with a motion planning/control subsystem. The network runs faster than real-time on an embedded GPU, and the system shows good generalization (across sensory modalities and locations) due to the choice of input representation. Furthermore, we demonstrate that by extending the DNN with reinforcement learning (RL), it can better handle rare or unsafe events like aggressive maneuvers and crashes.
Work in Progress: Temporally Extended Auxiliary Tasks
Apr 16, 2020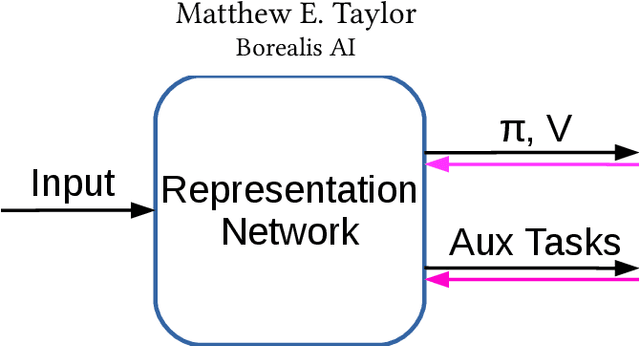

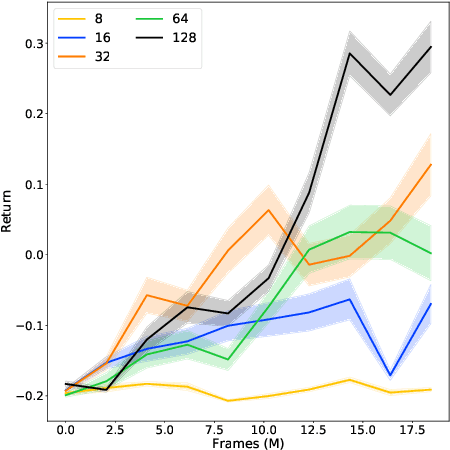
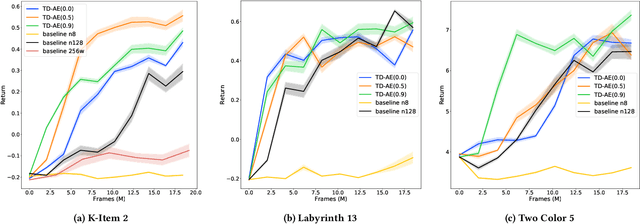
Predictive auxiliary tasks have been shown to improve performance in numerous reinforcement learning works, however, this effect is still not well understood. The primary purpose of the work presented here is to investigate the impact that an auxiliary task's prediction timescale has on the agent's policy performance. We consider auxiliary tasks which learn to make on-policy predictions using temporal difference learning. We test the impact of prediction timescale using a specific form of auxiliary task in which the input image is used as the prediction target, which we refer to as temporal difference autoencoders (TD-AE). We empirically evaluate the effect of TD-AE on the A2C algorithm in the VizDoom environment using different prediction timescales. While we do not observe a clear relationship between the prediction timescale on performance, we make the following observations: 1) using auxiliary tasks allows us to reduce the trajectory length of the A2C algorithm, 2) in some cases temporally extended TD-AE performs better than a straight autoencoder, 3) performance with auxiliary tasks is sensitive to the weight placed on the auxiliary loss, 4) despite this sensitivity, auxiliary tasks improved performance without extensive hyper-parameter tuning. Our overall conclusions are that TD-AE increases the robustness of the A2C algorithm to the trajectory length and while promising, further study is required to fully understand the relationship between auxiliary task prediction timescale and the agent's performance.
On Hard Exploration for Reinforcement Learning: a Case Study in Pommerman
Jul 26, 2019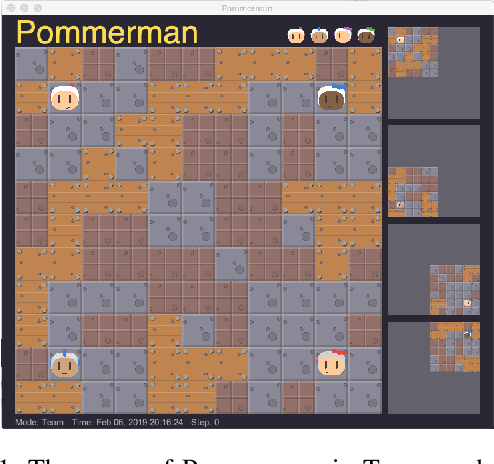


How to best explore in domains with sparse, delayed, and deceptive rewards is an important open problem for reinforcement learning (RL). This paper considers one such domain, the recently-proposed multi-agent benchmark of Pommerman. This domain is very challenging for RL --- past work has shown that model-free RL algorithms fail to achieve significant learning without artificially reducing the environment's complexity. In this paper, we illuminate reasons behind this failure by providing a thorough analysis on the hardness of random exploration in Pommerman. While model-free random exploration is typically futile, we develop a model-based automatic reasoning module that can be used for safer exploration by pruning actions that will surely lead the agent to death. We empirically demonstrate that this module can significantly improve learning.
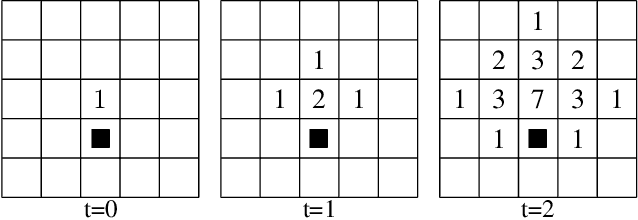
Action Guidance with MCTS for Deep Reinforcement Learning
Jul 25, 2019
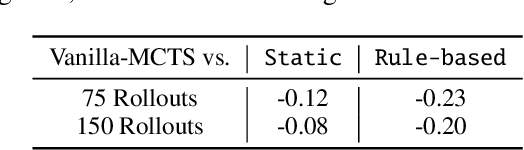

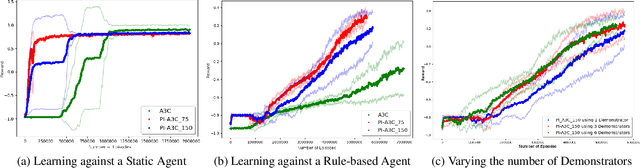
Deep reinforcement learning has achieved great successes in recent years, however, one main challenge is the sample inefficiency. In this paper, we focus on how to use action guidance by means of a non-expert demonstrator to improve sample efficiency in a domain with sparse, delayed, and possibly deceptive rewards: the recently-proposed multi-agent benchmark of Pommerman. We propose a new framework where even a non-expert simulated demonstrator, e.g., planning algorithms such as Monte Carlo tree search with a small number rollouts, can be integrated within asynchronous distributed deep reinforcement learning methods. Compared to a vanilla deep RL algorithm, our proposed methods both learn faster and converge to better policies on a two-player mini version of the Pommerman game.