 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAction Guidance with MCTS for Deep Reinforcement Learning
Paper and Code
Jul 25, 2019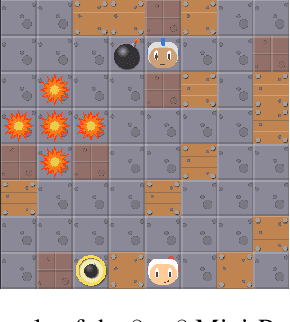
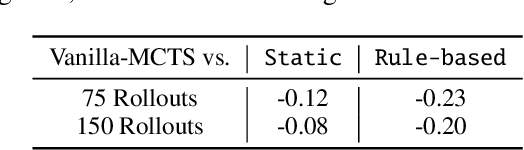

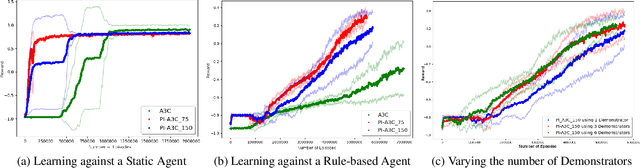
Deep reinforcement learning has achieved great successes in recent years, however, one main challenge is the sample inefficiency. In this paper, we focus on how to use action guidance by means of a non-expert demonstrator to improve sample efficiency in a domain with sparse, delayed, and possibly deceptive rewards: the recently-proposed multi-agent benchmark of Pommerman. We propose a new framework where even a non-expert simulated demonstrator, e.g., planning algorithms such as Monte Carlo tree search with a small number rollouts, can be integrated within asynchronous distributed deep reinforcement learning methods. Compared to a vanilla deep RL algorithm, our proposed methods both learn faster and converge to better policies on a two-player mini version of the Pommerman game.