 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFastGS: Training 3D Gaussian Splatting in 100 Seconds
Nov 06, 2025The dominant 3D Gaussian splatting (3DGS) acceleration methods fail to properly regulate the number of Gaussians during training, causing redundant computational time overhead. In this paper, we propose FastGS, a novel, simple, and general acceleration framework that fully considers the importance of each Gaussian based on multi-view consistency, efficiently solving the trade-off between training time and rendering quality. We innovatively design a densification and pruning strategy based on multi-view consistency, dispensing with the budgeting mechanism. Extensive experiments on Mip-NeRF 360, Tanks & Temples, and Deep Blending datasets demonstrate that our method significantly outperforms the state-of-the-art methods in training speed, achieving a 3.32$\times$ training acceleration and comparable rendering quality compared with DashGaussian on the Mip-NeRF 360 dataset and a 15.45$\times$ acceleration compared with vanilla 3DGS on the Deep Blending dataset. We demonstrate that FastGS exhibits strong generality, delivering 2-7$\times$ training acceleration across various tasks, including dynamic scene reconstruction, surface reconstruction, sparse-view reconstruction, large-scale reconstruction, and simultaneous localization and mapping. The project page is available at https://fastgs.github.io/
Robust Safety Critical Control Under Multiple State and Input Constraints: Volume Control Barrier Function Method
Mar 20, 2025In this paper, the safety-critical control problem for uncertain systems under multiple control barrier function (CBF) constraints and input constraints is investigated. A novel framework is proposed to generate a safety filter that minimizes changes to reference inputs when safety risks arise, ensuring a balance between safety and performance. A nonlinear disturbance observer (DOB) based on the robust integral of the sign of the error (RISE) is used to estimate system uncertainties, ensuring that the estimation error converges to zero exponentially. This error bound is integrated into the safety-critical controller to reduce conservativeness while ensuring safety. To further address the challenges arising from multiple CBF and input constraints, a novel Volume CBF (VCBF) is proposed by analyzing the feasible space of the quadratic programming (QP) problem. % ensuring solution feasibility by keeping the volume as a positive value. To ensure that the feasible space does not vanish under disturbances, a DOB-VCBF-based method is introduced, ensuring system safety while maintaining the feasibility of the resulting QP. Subsequently, several groups of simulation and experimental results are provided to validate the effectiveness of the proposed controller.
Optimization-free Smooth Control Barrier Function for Polygonal Collision Avoidance
Feb 22, 2025Polygonal collision avoidance (PCA) is short for the problem of collision avoidance between two polygons (i.e., polytopes in planar) that own their dynamic equations. This problem suffers the inherent difficulty in dealing with non-smooth boundaries and recently optimization-defined metrics, such as signed distance field (SDF) and its variants, have been proposed as control barrier functions (CBFs) to tackle PCA problems. In contrast, we propose an optimization-free smooth CBF method in this paper, which is computationally efficient and proved to be nonconservative. It is achieved by three main steps: a lower bound of SDF is expressed as a nested Boolean logic composition first, then its smooth approximation is established by applying the latest log-sum-exp method, after which a specified CBF-based safety filter is proposed to address this class of problems. To illustrate its wide applications, the optimization-free smooth CBF method is extended to solve distributed collision avoidance of two underactuated nonholonomic vehicles and drive an underactuated container crane to avoid a moving obstacle respectively, for which numerical simulations are also performed.
UltraGCN: Ultra Simplification of Graph Convolutional Networks for Recommendation
Oct 28, 2021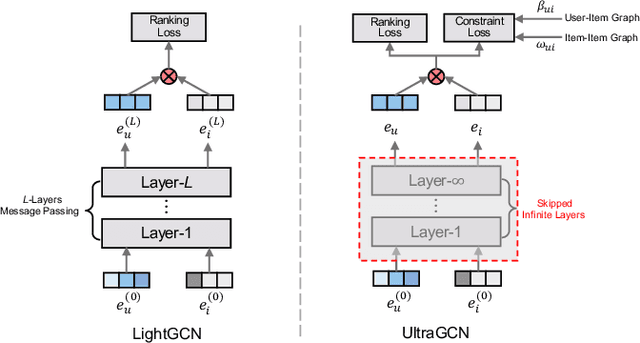
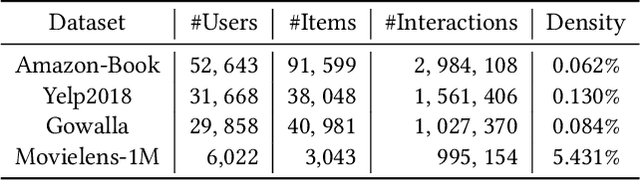

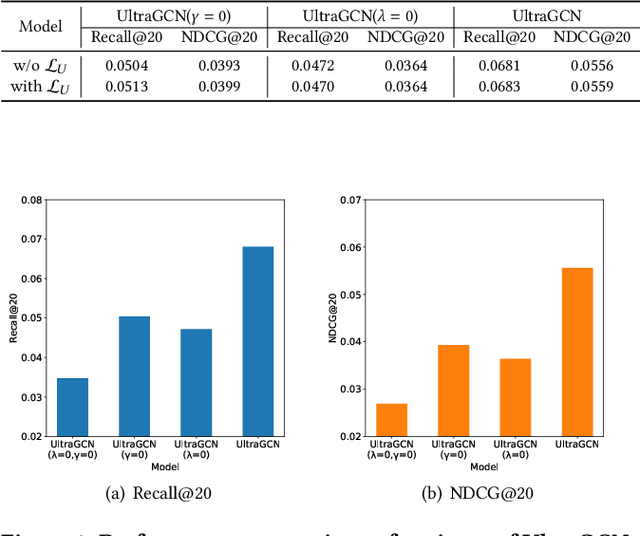
With the recent success of graph convolutional networks (GCNs), they have been widely applied for recommendation, and achieved impressive performance gains. The core of GCNs lies in its message passing mechanism to aggregate neighborhood information. However, we observed that message passing largely slows down the convergence of GCNs during training, especially for large-scale recommender systems, which hinders their wide adoption. LightGCN makes an early attempt to simplify GCNs for collaborative filtering by omitting feature transformations and nonlinear activations. In this paper, we take one step further to propose an ultra-simplified formulation of GCNs (dubbed UltraGCN), which skips infinite layers of message passing for efficient recommendation. Instead of explicit message passing, UltraGCN resorts to directly approximate the limit of infinite-layer graph convolutions via a constraint loss. Meanwhile, UltraGCN allows for more appropriate edge weight assignments and flexible adjustment of the relative importances among different types of relationships. This finally yields a simple yet effective UltraGCN model, which is easy to implement and efficient to train. Experimental results on four benchmark datasets show that UltraGCN not only outperforms the state-of-the-art GCN models but also achieves more than 10x speedup over LightGCN.
Item Tagging for Information Retrieval: A Tripartite Graph Neural Network based Approach
Aug 26, 2020



Tagging has been recognized as a successful practice to boost relevance matching for information retrieval (IR), especially when items lack rich textual descriptions. A lot of research has been done for either multi-label text categorization or image annotation. However, there is a lack of published work that targets at item tagging specifically for IR. Directly applying a traditional multi-label classification model for item tagging is sub-optimal, due to the ignorance of unique characteristics in IR. In this work, we propose to formulate item tagging as a link prediction problem between item nodes and tag nodes. To enrich the representation of items, we leverage the query logs available in IR tasks, and construct a query-item-tag tripartite graph. This formulation results in a TagGNN model that utilizes heterogeneous graph neural networks with multiple types of nodes and edges. Different from previous research, we also optimize both full tag prediction and partial tag completion cases in a unified framework via a primary-dual loss mechanism. Experimental results on both open and industrial datasets show that our TagGNN approach outperforms the state-of-the-art multi-label classification approaches.