 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLEAD: Minimizing Learner-Expert Asymmetry in End-to-End Driving
Dec 23, 2025Simulators can generate virtually unlimited driving data, yet imitation learning policies in simulation still struggle to achieve robust closed-loop performance. Motivated by this gap, we empirically study how misalignment between privileged expert demonstrations and sensor-based student observations can limit the effectiveness of imitation learning. More precisely, experts have significantly higher visibility (e.g., ignoring occlusions) and far lower uncertainty (e.g., knowing other vehicles' actions), making them difficult to imitate reliably. Furthermore, navigational intent (i.e., the route to follow) is under-specified in student models at test time via only a single target point. We demonstrate that these asymmetries can measurably limit driving performance in CARLA and offer practical interventions to address them. After careful modifications to narrow the gaps between expert and student, our TransFuser v6 (TFv6) student policy achieves a new state of the art on all major publicly available CARLA closed-loop benchmarks, reaching 95 DS on Bench2Drive and more than doubling prior performances on Longest6~v2 and Town13. Additionally, by integrating perception supervision from our dataset into a shared sim-to-real pipeline, we show consistent gains on the NAVSIM and Waymo Vision-Based End-to-End driving benchmarks. Our code, data, and models are publicly available at https://github.com/autonomousvision/lead.
CaRL: Learning Scalable Planning Policies with Simple Rewards
Apr 24, 2025We investigate reinforcement learning (RL) for privileged planning in autonomous driving. State-of-the-art approaches for this task are rule-based, but these methods do not scale to the long tail. RL, on the other hand, is scalable and does not suffer from compounding errors like imitation learning. Contemporary RL approaches for driving use complex shaped rewards that sum multiple individual rewards, \eg~progress, position, or orientation rewards. We show that PPO fails to optimize a popular version of these rewards when the mini-batch size is increased, which limits the scalability of these approaches. Instead, we propose a new reward design based primarily on optimizing a single intuitive reward term: route completion. Infractions are penalized by terminating the episode or multiplicatively reducing route completion. We find that PPO scales well with higher mini-batch sizes when trained with our simple reward, even improving performance. Training with large mini-batch sizes enables efficient scaling via distributed data parallelism. We scale PPO to 300M samples in CARLA and 500M samples in nuPlan with a single 8-GPU node. The resulting model achieves 64 DS on the CARLA longest6 v2 benchmark, outperforming other RL methods with more complex rewards by a large margin. Requiring only minimal adaptations from its use in CARLA, the same method is the best learning-based approach on nuPlan. It scores 91.3 in non-reactive and 90.6 in reactive traffic on the Val14 benchmark while being an order of magnitude faster than prior work.
Hidden Biases of End-to-End Driving Datasets
Dec 12, 2024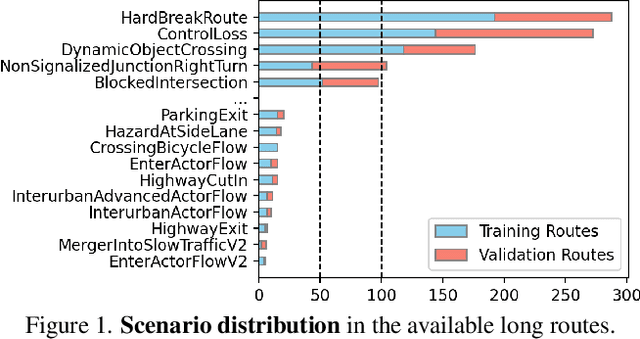
End-to-end driving systems have made rapid progress, but have so far not been applied to the challenging new CARLA Leaderboard 2.0. Further, while there is a large body of literature on end-to-end architectures and training strategies, the impact of the training dataset is often overlooked. In this work, we make a first attempt at end-to-end driving for Leaderboard 2.0. Instead of investigating architectures, we systematically analyze the training dataset, leading to new insights: (1) Expert style significantly affects downstream policy performance. (2) In complex data sets, the frames should not be weighted on the basis of simplistic criteria such as class frequencies. (3) Instead, estimating whether a frame changes the target labels compared to previous frames can reduce the size of the dataset without removing important information. By incorporating these findings, our model ranks first and second respectively on the map and sensors tracks of the 2024 CARLA Challenge, and sets a new state-of-the-art on the Bench2Drive test routes. Finally, we uncover a design flaw in the current evaluation metrics and propose a modification for future challenges. Our dataset, code, and pre-trained models are publicly available at https://github.com/autonomousvision/carla_garage.
An Invitation to Deep Reinforcement Learning
Dec 13, 2023Training a deep neural network to maximize a target objective has become the standard recipe for successful machine learning over the last decade. These networks can be optimized with supervised learning, if the target objective is differentiable. For many interesting problems, this is however not the case. Common objectives like intersection over union (IoU), bilingual evaluation understudy (BLEU) score or rewards cannot be optimized with supervised learning. A common workaround is to define differentiable surrogate losses, leading to suboptimal solutions with respect to the actual objective. Reinforcement learning (RL) has emerged as a promising alternative for optimizing deep neural networks to maximize non-differentiable objectives in recent years. Examples include aligning large language models via human feedback, code generation, object detection or control problems. This makes RL techniques relevant to the larger machine learning audience. The subject is, however, time intensive to approach due to the large range of methods, as well as the often very theoretical presentation. In this introduction, we take an alternative approach, different from classic reinforcement learning textbooks. Rather than focusing on tabular problems, we introduce reinforcement learning as a generalization of supervised learning, which we first apply to non-differentiable objectives and later to temporal problems. Assuming only basic knowledge of supervised learning, the reader will be able to understand state-of-the-art deep RL algorithms like proximal policy optimization (PPO) after reading this tutorial.
GTA: A Geometry-Aware Attention Mechanism for Multi-View Transformers
Oct 16, 2023As transformers are equivariant to the permutation of input tokens, encoding the positional information of tokens is necessary for many tasks. However, since existing positional encoding schemes have been initially designed for NLP tasks, their suitability for vision tasks, which typically exhibit different structural properties in their data, is questionable. We argue that existing positional encoding schemes are suboptimal for 3D vision tasks, as they do not respect their underlying 3D geometric structure. Based on this hypothesis, we propose a geometry-aware attention mechanism that encodes the geometric structure of tokens as relative transformation determined by the geometric relationship between queries and key-value pairs. By evaluating on multiple novel view synthesis (NVS) datasets in the sparse wide-baseline multi-view setting, we show that our attention, called Geometric Transform Attention (GTA), improves learning efficiency and performance of state-of-the-art transformer-based NVS models without any additional learned parameters and only minor computational overhead.
End-to-end Autonomous Driving: Challenges and Frontiers
Jun 29, 2023



The autonomous driving community has witnessed a rapid growth in approaches that embrace an end-to-end algorithm framework, utilizing raw sensor input to generate vehicle motion plans, instead of concentrating on individual tasks such as detection and motion prediction. End-to-end systems, in comparison to modular pipelines, benefit from joint feature optimization for perception and planning. This field has flourished due to the availability of large-scale datasets, closed-loop evaluation, and the increasing need for autonomous driving algorithms to perform effectively in challenging scenarios. In this survey, we provide a comprehensive analysis of more than 250 papers, covering the motivation, roadmap, methodology, challenges, and future trends in end-to-end autonomous driving. We delve into several critical challenges, including multi-modality, interpretability, causal confusion, robustness, and world models, amongst others. Additionally, we discuss current advancements in foundation models and visual pre-training, as well as how to incorporate these techniques within the end-to-end driving framework. To facilitate future research, we maintain an active repository that contains up-to-date links to relevant literature and open-source projects at https://github.com/OpenDriveLab/End-to-end-Autonomous-Driving.
Hidden Biases of End-to-End Driving Models
Jun 13, 2023



End-to-end driving systems have recently made rapid progress, in particular on CARLA. Independent of their major contribution, they introduce changes to minor system components. Consequently, the source of improvements is unclear. We identify two biases that recur in nearly all state-of-the-art methods and are critical for the observed progress on CARLA: (1) lateral recovery via a strong inductive bias towards target point following, and (2) longitudinal averaging of multimodal waypoint predictions for slowing down. We investigate the drawbacks of these biases and identify principled alternatives. By incorporating our insights, we develop TF++, a simple end-to-end method that ranks first on the Longest6 and LAV benchmarks, gaining 14 driving score over the best prior work on Longest6.
TransFuser: Imitation with Transformer-Based Sensor Fusion for Autonomous Driving
May 31, 2022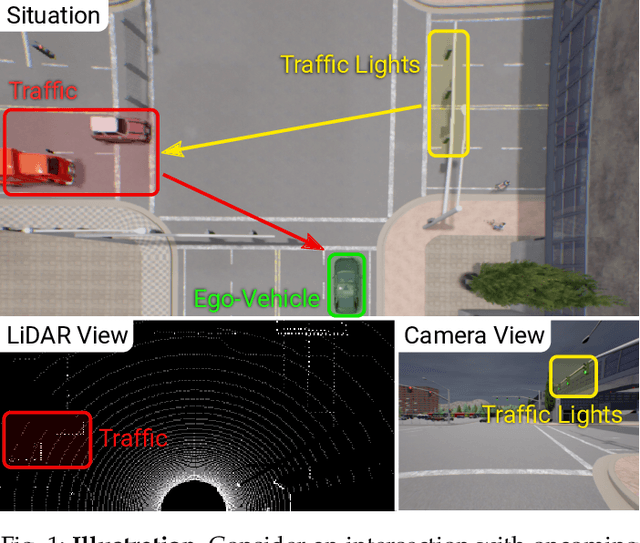
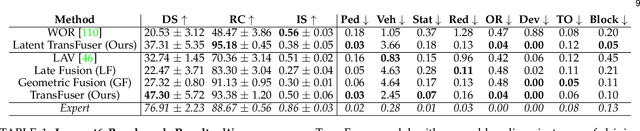
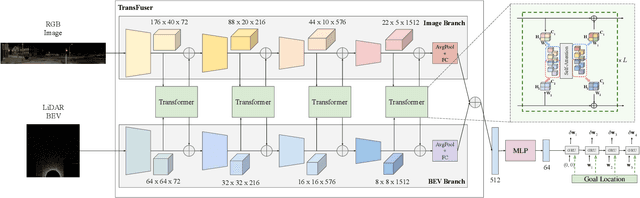
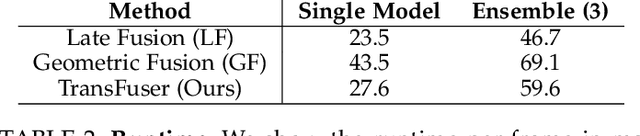
How should we integrate representations from complementary sensors for autonomous driving? Geometry-based fusion has shown promise for perception (e.g. object detection, motion forecasting). However, in the context of end-to-end driving, we find that imitation learning based on existing sensor fusion methods underperforms in complex driving scenarios with a high density of dynamic agents. Therefore, we propose TransFuser, a mechanism to integrate image and LiDAR representations using self-attention. Our approach uses transformer modules at multiple resolutions to fuse perspective view and bird's eye view feature maps. We experimentally validate its efficacy on a challenging new benchmark with long routes and dense traffic, as well as the official leaderboard of the CARLA urban driving simulator. At the time of submission, TransFuser outperforms all prior work on the CARLA leaderboard in terms of driving score by a large margin. Compared to geometry-based fusion, TransFuser reduces the average collisions per kilometer by 48%.