 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
Reactive Base Control for On-The-Move Mobile Manipulation in Dynamic Environments
Sep 17, 2023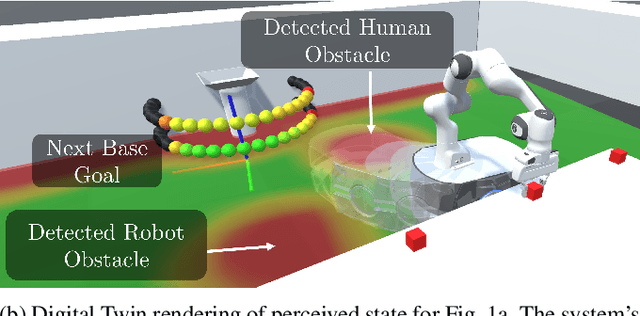
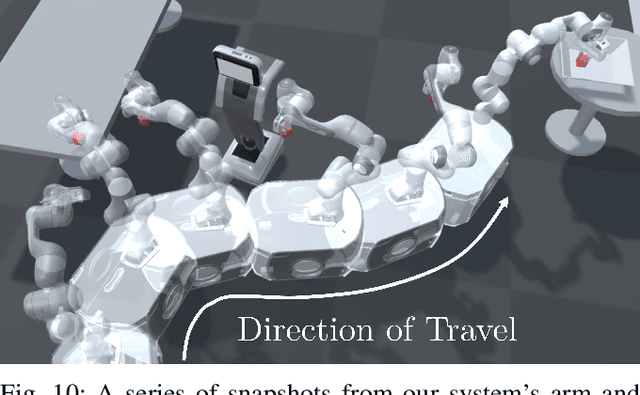
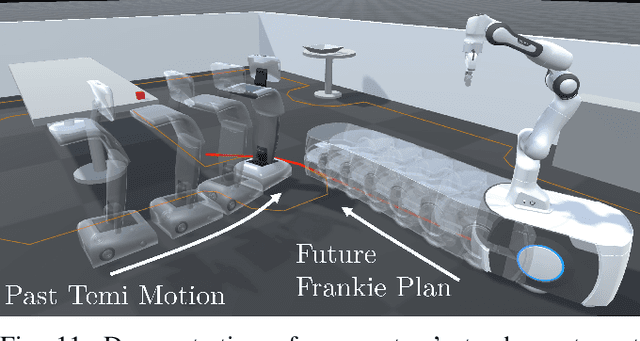
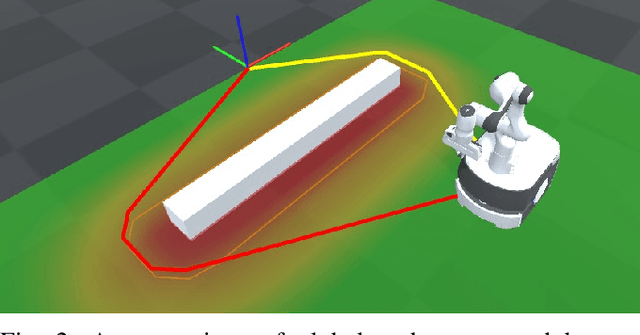
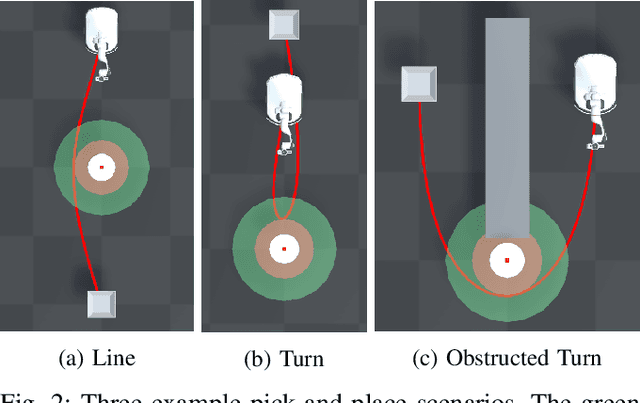
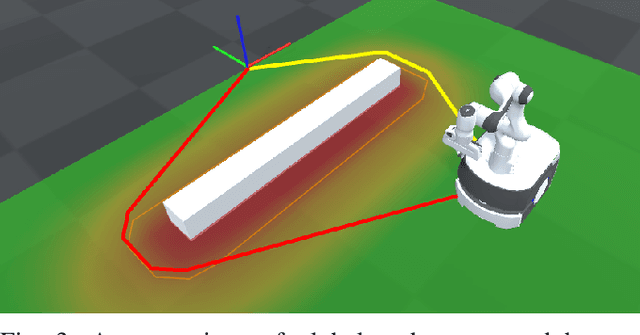
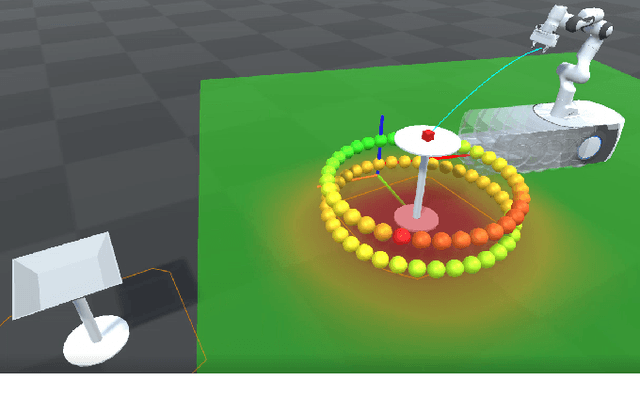
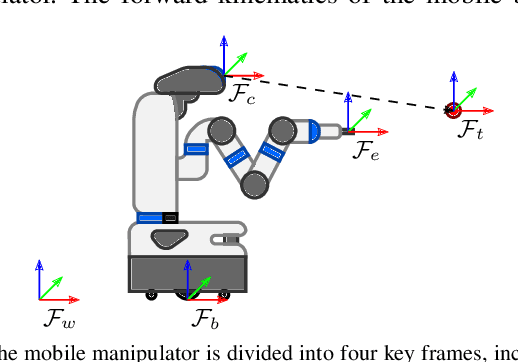
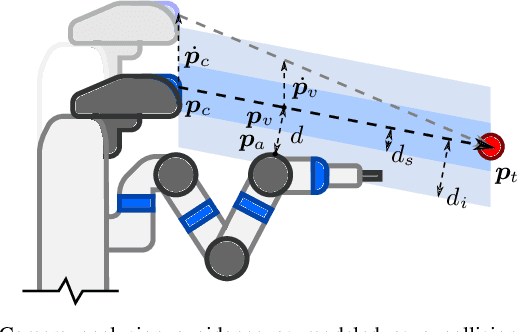
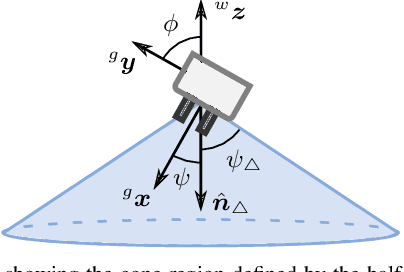
We present a reactive base control method that enables high performance mobile manipulation on-the-move in environments with static and dynamic obstacles. Performing manipulation tasks while the mobile base remains in motion can significantly decrease the time required to perform multi-step tasks, as well as improve the gracefulness of the robot's motion. Existing approaches to manipulation on-the-move either ignore the obstacle avoidance problem or rely on the execution of planned trajectories, which is not suitable in environments with dynamic objects and obstacles. The presented controller addresses both of these deficiencies and demonstrates robust performance of pick-and-place tasks in dynamic environments. The performance is evaluated on several simulated and real-world tasks. On a real-world task with static obstacles, we outperform an existing method by 48\% in terms of total task time. Further, we present real-world examples of our robot performing manipulation tasks on-the-move while avoiding a second autonomous robot in the workspace. See https://benburgesslimerick.github.io/MotM-BaseControl for supplementary materials.
Enabling Failure Recovery for On-The-Move Mobile Manipulation
May 15, 2023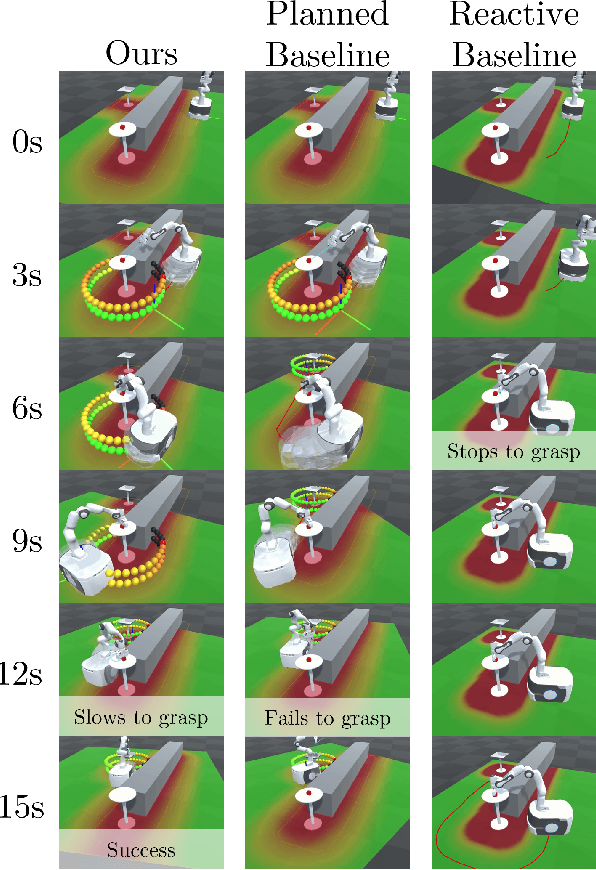
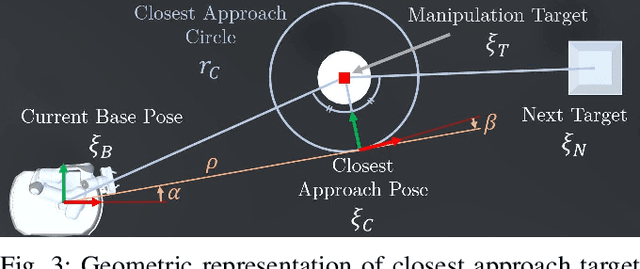
We present a robot base placement and control method that enables a mobile manipulator to gracefully recover from manipulation failures while performing tasks on-the-move. A mobile manipulator in motion has a limited window to complete a task, unlike when stationary where it can make repeated attempts until successful. Existing approaches to manipulation on-the-move are typically based on open-loop execution of planned trajectories which does not allow the base controller to react to manipulation failures, slowing down or stopping as required. To overcome this limitation, we present a reactive base control method that repeatedly evaluates the best base placement given the robot's current state, the immediate manipulation task, as well as the next part of a multi-step task. The result is a system that retains the reliability of traditional mobile manipulation approaches where the base comes to a stop, but leverages the performance gains available by performing manipulation on-the-move. The controller keeps the base in range of the target for as long as required to recover from manipulation failures while making as much progress as possible toward the next objective. See https://benburgesslimerick.github.io/MotM-FailureRecovery for videos of experiments.
An Architecture for Reactive Mobile Manipulation On-The-Move
Dec 14, 2022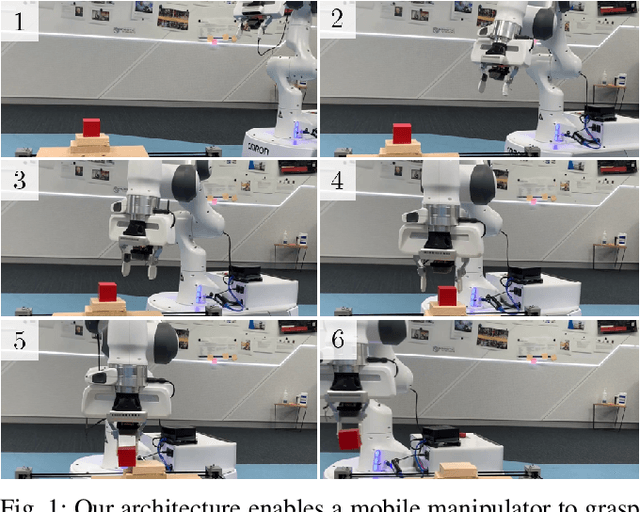
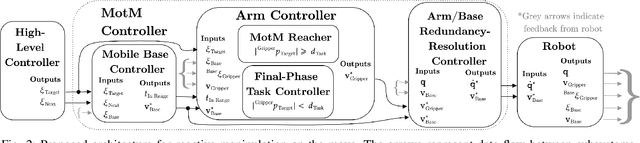
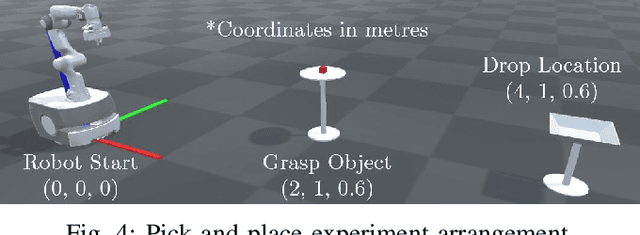
We present a generalised architecture for reactive mobile manipulation while a robot's base is in motion toward the next objective in a high-level task. By performing tasks on-the-move, overall cycle time is reduced compared to methods where the base pauses during manipulation. Reactive control of the manipulator enables grasping objects with unpredictable motion while improving robustness against perception errors, environmental disturbances, and inaccurate robot control compared to open-loop, trajectory-based planning approaches. We present an example implementation of the architecture and investigate the performance on a series of pick and place tasks with both static and dynamic objects and compare the performance to baseline methods. Our method demonstrated a real-world success rate of over 99%, failing in only a single trial from 120 attempts with a physical robot system. The architecture is further demonstrated on other mobile manipulator platforms in simulation. Our approach reduces task time by up to 48%, while also improving reliability, gracefulness, and predictability compared to existing architectures for mobile manipulation. See https://benburgesslimerick.github.io/ManipulationOnTheMove for supplementary materials.
Eyes on the Prize: Improved Perception for Robust Dynamic Grasping
Apr 29, 2022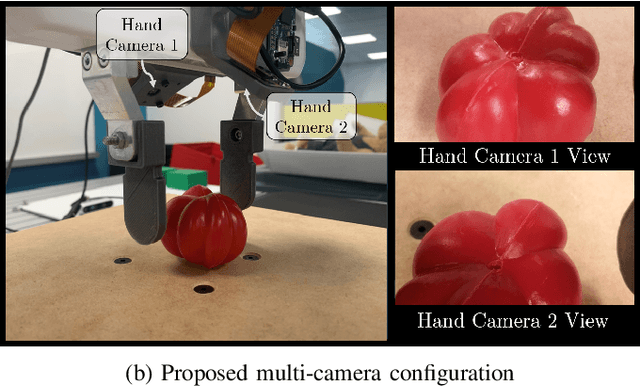

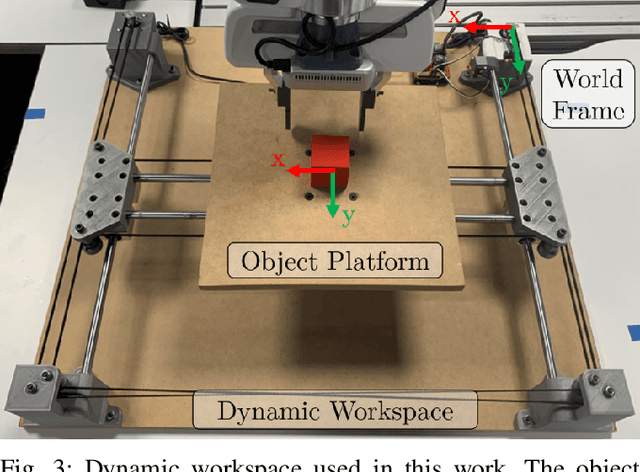
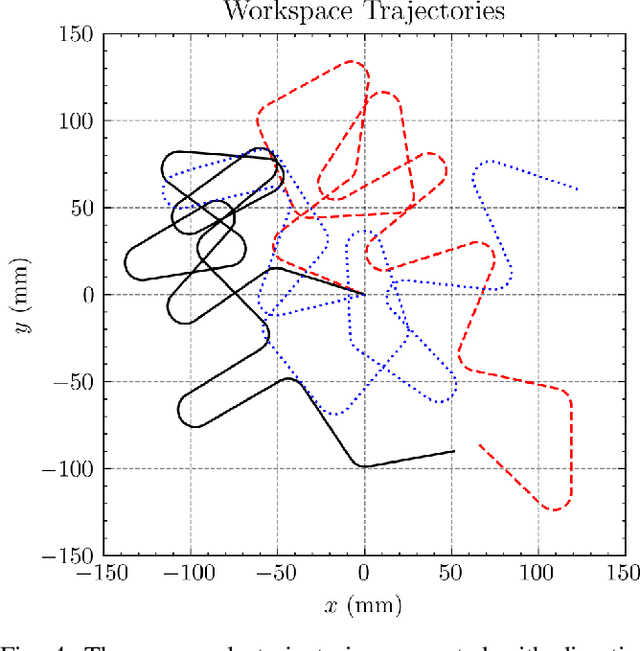
This paper is concerned with perception challenges for robust grasping in the presence of clutter and unpredictable relative motion between robot and object. Traditional perception systems developed for static grasping are unable to provide feedback during the final phase of a grasp due to sensor minimum range, occlusion, and a limited field of view. A multi-camera eye-in-hand perception system is presented that has advantages over commonly used camera configurations. We quantitatively evaluate the performance on a real robot with an image-based visual servoing grasp controller and show a significantly improved success rate on a dynamic grasping task. A fully reproducible open-source testing system is described to encourage benchmarking of dynamic grasping system performance.
Visibility Maximization Controller for Robotic Manipulation
Feb 25, 2022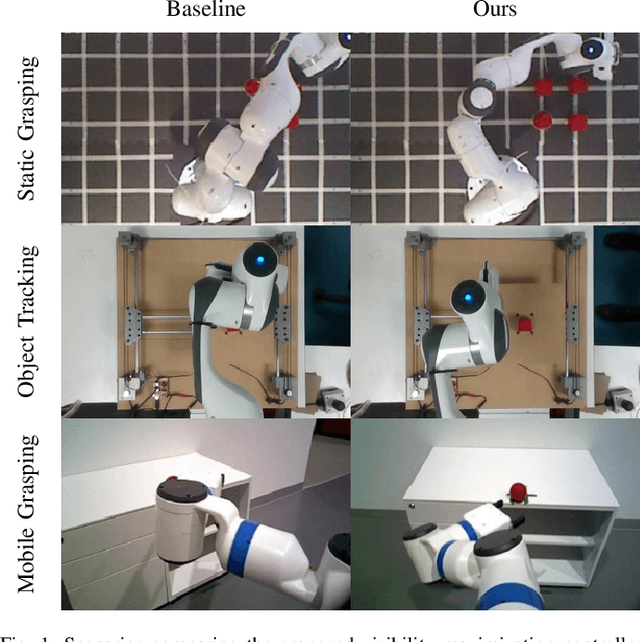
Occlusions caused by a robot's own body is a common problem for closed-loop control methods employed in eye-to-hand camera setups. We propose an optimization-based reactive controller that minimizes self-occlusions while achieving a desired goal pose. The approach allows coordinated control between the robot's base, arm and head by encoding the line-of-sight visibility to the target as a soft constraint along with other task-related constraints, and solving for feasible joint and base velocities. The generalizability of the approach is demonstrated in simulated and real-world experiments, on robots with fixed or mobile bases, with moving or fixed objects, and multiple objects. The experiments revealed a trade-off between occlusion rates and other task metrics. While a planning-based baseline achieved lower occlusion rates than the proposed controller, it came at the expense of highly inefficient paths and a significant drop in the task success. On the other hand, the proposed controller is shown to improve visibility to the line target object(s) without sacrificing too much from the task success and efficiency. Videos and code can be found at: rhys-newbury.github.io/projects/vmc/.