 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
LlamaRL: A Distributed Asynchronous Reinforcement Learning Framework for Efficient Large-scale LLM Trainin
May 29, 2025Reinforcement Learning (RL) has become the most effective post-training approach for improving the capabilities of Large Language Models (LLMs). In practice, because of the high demands on latency and memory, it is particularly challenging to develop an efficient RL framework that reliably manages policy models with hundreds to thousands of billions of parameters. In this paper, we present LlamaRL, a fully distributed, asynchronous RL framework optimized for efficient training of large-scale LLMs with various model sizes (8B, 70B, and 405B parameters) on GPU clusters ranging from a handful to thousands of devices. LlamaRL introduces a streamlined, single-controller architecture built entirely on native PyTorch, enabling modularity, ease of use, and seamless scalability to thousands of GPUs. We also provide a theoretical analysis of LlamaRL's efficiency, including a formal proof that its asynchronous design leads to strict RL speed-up. Empirically, by leveraging best practices such as colocated model offloading, asynchronous off-policy training, and distributed direct memory access for weight synchronization, LlamaRL achieves significant efficiency gains -- up to 10.7x speed-up compared to DeepSpeed-Chat-like systems on a 405B-parameter policy model. Furthermore, the efficiency advantage continues to grow with increasing model scale, demonstrating the framework's suitability for future large-scale RL training.
Implementation and (Inverse Modified) Error Analysis for implicitly-templated ODE-nets
Apr 10, 2023We focus on learning unknown dynamics from data using ODE-nets templated on implicit numerical initial value problem solvers. First, we perform Inverse Modified error analysis of the ODE-nets using unrolled implicit schemes for ease of interpretation. It is shown that training an ODE-net using an unrolled implicit scheme returns a close approximation of an Inverse Modified Differential Equation (IMDE). In addition, we establish a theoretical basis for hyper-parameter selection when training such ODE-nets, whereas current strategies usually treat numerical integration of ODE-nets as a black box. We thus formulate an adaptive algorithm which monitors the level of error and adapts the number of (unrolled) implicit solution iterations during the training process, so that the error of the unrolled approximation is less than the current learning loss. This helps accelerate training, while maintaining accuracy. Several numerical experiments are performed to demonstrate the advantages of the proposed algorithm compared to nonadaptive unrollings, and validate the theoretical analysis. We also note that this approach naturally allows for incorporating partially known physical terms in the equations, giving rise to what is termed ``gray box" identification.
On Numerical Integration in Neural Ordinary Differential Equations
Jun 15, 2022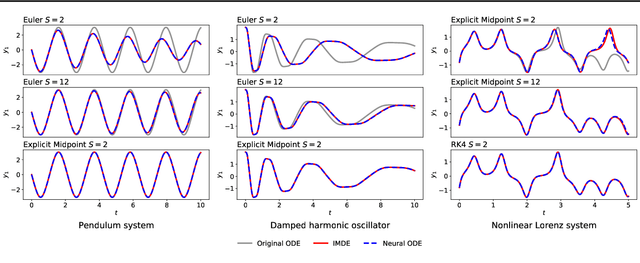
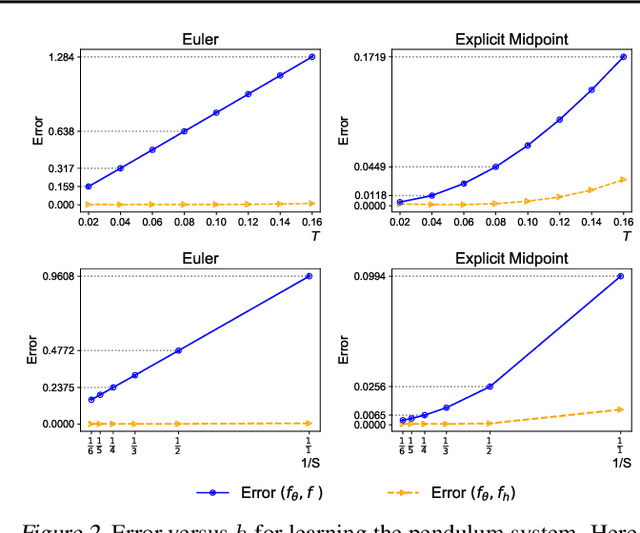
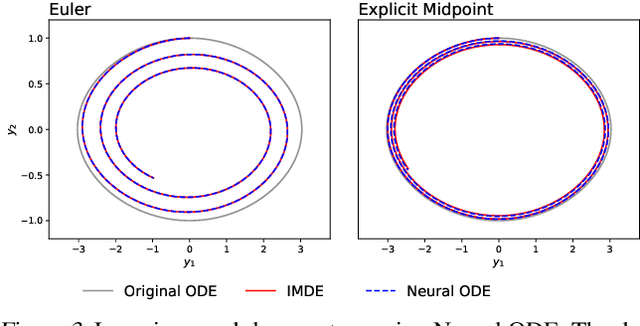
The combination of ordinary differential equations and neural networks, i.e., neural ordinary differential equations (Neural ODE), has been widely studied from various angles. However, deciphering the numerical integration in Neural ODE is still an open challenge, as many researches demonstrated that numerical integration significantly affects the performance of the model. In this paper, we propose the inverse modified differential equations (IMDE) to clarify the influence of numerical integration on training Neural ODE models. IMDE is determined by the learning task and the employed ODE solver. It is shown that training a Neural ODE model actually returns a close approximation of the IMDE, rather than the true ODE. With the help of IMDE, we deduce that (i) the discrepancy between the learned model and the true ODE is bounded by the sum of discretization error and learning loss; (ii) Neural ODE using non-symplectic numerical integration fail to learn conservation laws theoretically. Several experiments are performed to numerically verify our theoretical analysis.
VPNets: Volume-preserving neural networks for learning source-free dynamics
Apr 29, 2022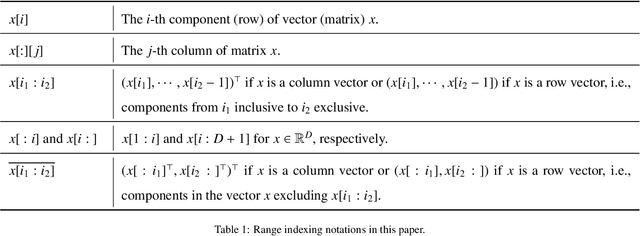
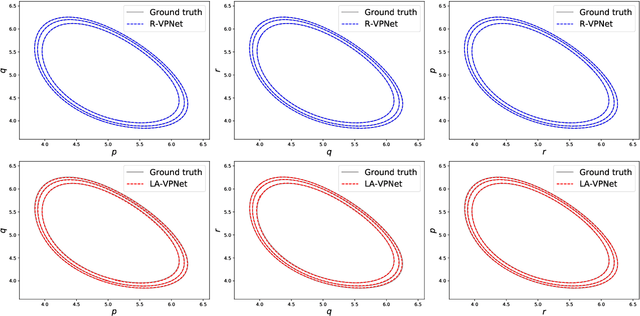
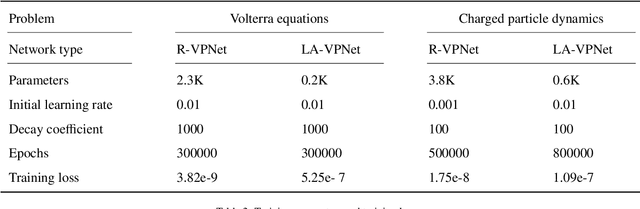
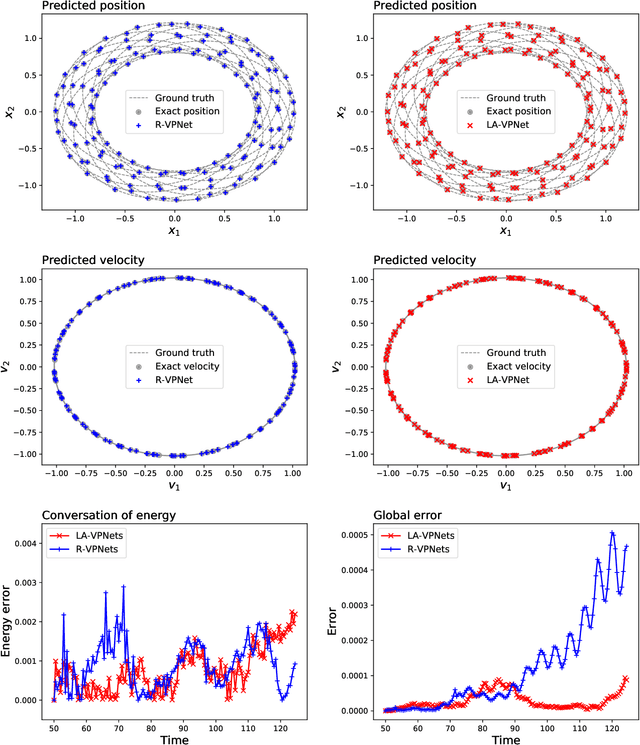
We propose volume-preserving networks (VPNets) for learning unknown source-free dynamical systems using trajectory data. We propose three modules and combine them to obtain two network architectures, coined R-VPNet and LA-VPNet. The distinct feature of the proposed models is that they are intrinsic volume-preserving. In addition, the corresponding approximation theorems are proved, which theoretically guarantee the expressivity of the proposed VPNets to learn source-free dynamics. The effectiveness, generalization ability and structure-preserving property of the VP-Nets are demonstrated by numerical experiments.