 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning symplectic model reduction based on a approximation theorem of symplectic embeddings
Jun 03, 2026High-dimensional Hamiltonian systems play a central role in many scientific and engineering disciplines, with dynamics evolving on symplectic manifolds. Although deep learning provides powerful tools for constructing low-dimensional surrogates from data, the intrinsic symplectic structure is easily destroyed during model reduction. As a result, a standard autoencoder may produce latent coordinates that do not support a Hamiltonian flow, leading to unstable long-time prediction. In this paper, we first establish a universal approximation theorem for symplectic embeddings. Based on this theory, we propose symplecticity-preserving autoencoders (SpAE), in which the decoder is parameterized as a symplectic embedding and the encoder is constructed as the corresponding symplectic projection. This architecture is expressive enough to approximate nonlinear symplectic embeddings and the associated symplectic projections, preserves the symplectic structure exactly by construction, and can be trained by standard unconstrained optimization, thereby improving both reconstruction and prediction accuracy. Extensive experiments on high-dimensional lattice and particle systems demonstrate the effectiveness of the proposed method.
Continuity-Preserving Convolutional Autoencoders for Learning Continuous Latent Dynamical Models from Images
Feb 02, 2025



Continuous dynamical systems are cornerstones of many scientific and engineering disciplines. While machine learning offers powerful tools to model these systems from trajectory data, challenges arise when these trajectories are captured as images, resulting in pixel-level observations that are discrete in nature. Consequently, a naive application of a convolutional autoencoder can result in latent coordinates that are discontinuous in time. To resolve this, we propose continuity-preserving convolutional autoencoders (CpAEs) to learn continuous latent states and their corresponding continuous latent dynamical models from discrete image frames. We present a mathematical formulation for learning dynamics from image frames, which illustrates issues with previous approaches and motivates our methodology based on promoting the continuity of convolution filters, thereby preserving the continuity of the latent states. This approach enables CpAEs to produce latent states that evolve continuously with the underlying dynamics, leading to more accurate latent dynamical models. Extensive experiments across various scenarios demonstrate the effectiveness of CpAEs.
DynGMA: a robust approach for learning stochastic differential equations from data
Feb 22, 2024



Learning unknown stochastic differential equations (SDEs) from observed data is a significant and challenging task with applications in various fields. Current approaches often use neural networks to represent drift and diffusion functions, and construct likelihood-based loss by approximating the transition density to train these networks. However, these methods often rely on one-step stochastic numerical schemes, necessitating data with sufficiently high time resolution. In this paper, we introduce novel approximations to the transition density of the parameterized SDE: a Gaussian density approximation inspired by the random perturbation theory of dynamical systems, and its extension, the dynamical Gaussian mixture approximation (DynGMA). Benefiting from the robust density approximation, our method exhibits superior accuracy compared to baseline methods in learning the fully unknown drift and diffusion functions and computing the invariant distribution from trajectory data. And it is capable of handling trajectory data with low time resolution and variable, even uncontrollable, time step sizes, such as data generated from Gillespie's stochastic simulations. We then conduct several experiments across various scenarios to verify the advantages and robustness of the proposed method.
Implementation and (Inverse Modified) Error Analysis for implicitly-templated ODE-nets
Apr 10, 2023We focus on learning unknown dynamics from data using ODE-nets templated on implicit numerical initial value problem solvers. First, we perform Inverse Modified error analysis of the ODE-nets using unrolled implicit schemes for ease of interpretation. It is shown that training an ODE-net using an unrolled implicit scheme returns a close approximation of an Inverse Modified Differential Equation (IMDE). In addition, we establish a theoretical basis for hyper-parameter selection when training such ODE-nets, whereas current strategies usually treat numerical integration of ODE-nets as a black box. We thus formulate an adaptive algorithm which monitors the level of error and adapts the number of (unrolled) implicit solution iterations during the training process, so that the error of the unrolled approximation is less than the current learning loss. This helps accelerate training, while maintaining accuracy. Several numerical experiments are performed to demonstrate the advantages of the proposed algorithm compared to nonadaptive unrollings, and validate the theoretical analysis. We also note that this approach naturally allows for incorporating partially known physical terms in the equations, giving rise to what is termed ``gray box" identification.
On Numerical Integration in Neural Ordinary Differential Equations
Jun 15, 2022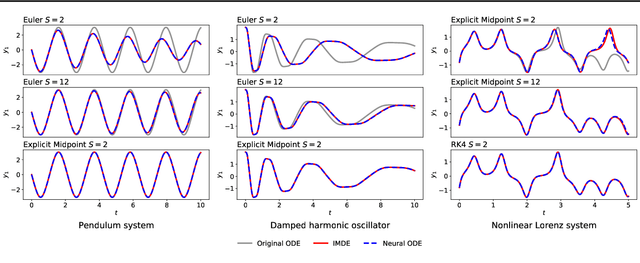
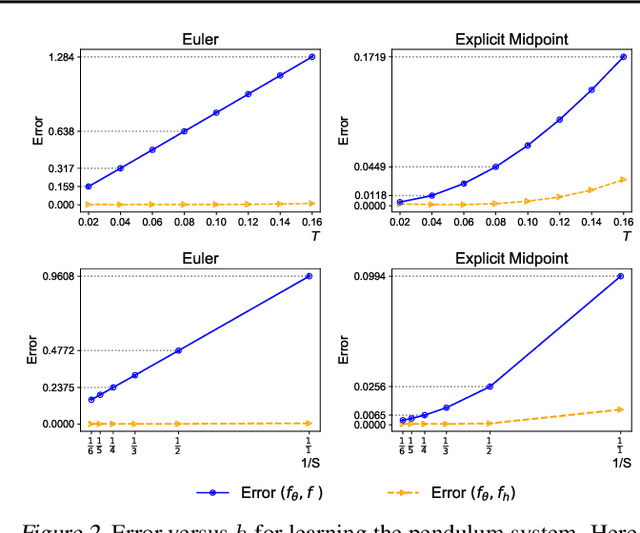
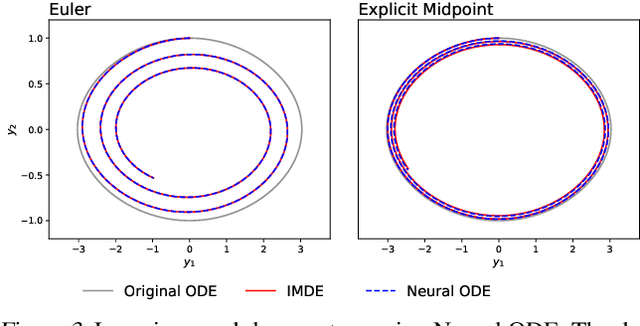
The combination of ordinary differential equations and neural networks, i.e., neural ordinary differential equations (Neural ODE), has been widely studied from various angles. However, deciphering the numerical integration in Neural ODE is still an open challenge, as many researches demonstrated that numerical integration significantly affects the performance of the model. In this paper, we propose the inverse modified differential equations (IMDE) to clarify the influence of numerical integration on training Neural ODE models. IMDE is determined by the learning task and the employed ODE solver. It is shown that training a Neural ODE model actually returns a close approximation of the IMDE, rather than the true ODE. With the help of IMDE, we deduce that (i) the discrepancy between the learned model and the true ODE is bounded by the sum of discretization error and learning loss; (ii) Neural ODE using non-symplectic numerical integration fail to learn conservation laws theoretically. Several experiments are performed to numerically verify our theoretical analysis.
VPNets: Volume-preserving neural networks for learning source-free dynamics
Apr 29, 2022
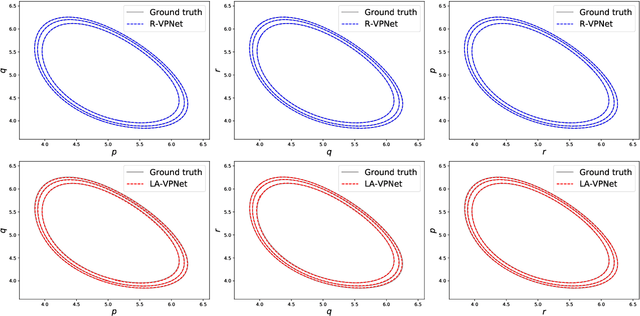
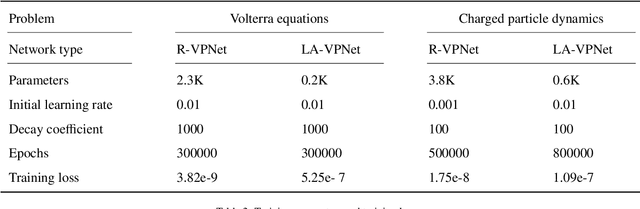
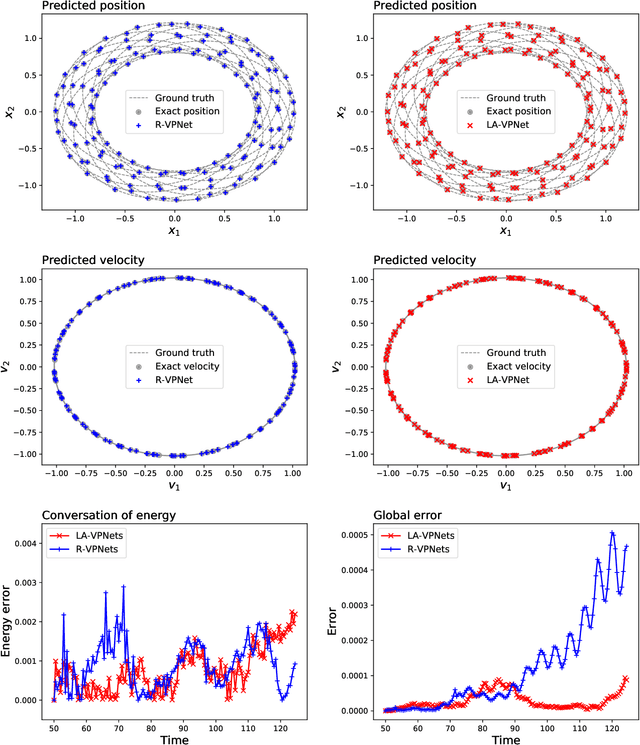
We propose volume-preserving networks (VPNets) for learning unknown source-free dynamical systems using trajectory data. We propose three modules and combine them to obtain two network architectures, coined R-VPNet and LA-VPNet. The distinct feature of the proposed models is that they are intrinsic volume-preserving. In addition, the corresponding approximation theorems are proved, which theoretically guarantee the expressivity of the proposed VPNets to learn source-free dynamics. The effectiveness, generalization ability and structure-preserving property of the VP-Nets are demonstrated by numerical experiments.
Approximation capabilities of measure-preserving neural networks
Jun 21, 2021
Measure-preserving neural networks are well-developed invertible models, however, the approximation capabilities remain unexplored. This paper rigorously establishes the general sufficient conditions for approximating measure-preserving maps using measure-preserving neural networks. It is shown that for compact $U \subset \R^D$ with $D\geq 2$, every measure-preserving map $\psi: U\to \R^D$ which is injective and bounded can be approximated in the $L^p$-norm by measure-preserving neural networks. Specifically, the differentiable maps with $\pm 1$ determinants of Jacobians are measure-preserving, injective and bounded on $U$, thus hold the approximation property.
Symplectic networks: Intrinsic structure-preserving networks for identifying Hamiltonian systems
Jan 11, 2020
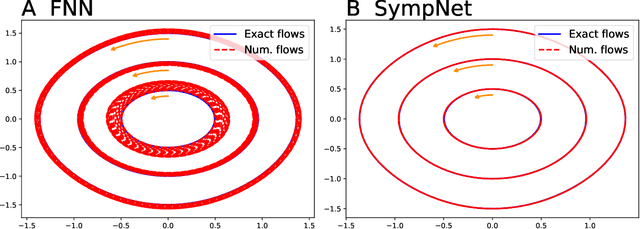

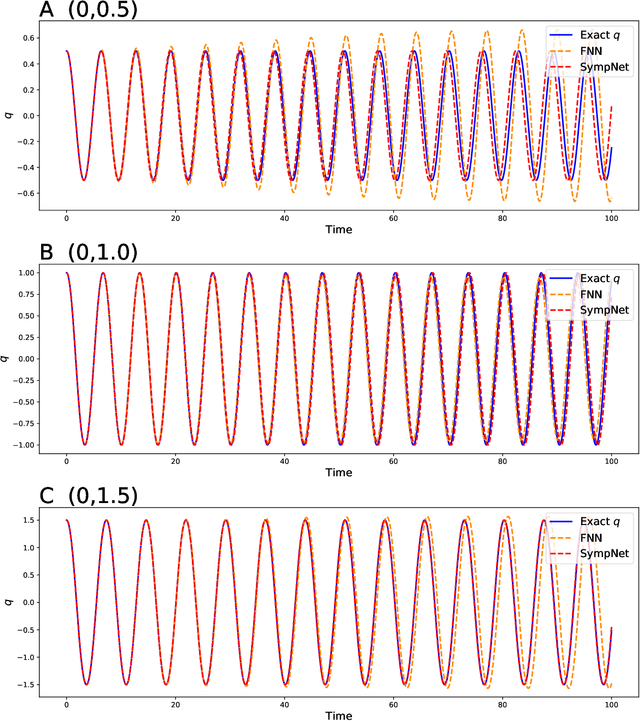
This work presents a framework of constructing the neural networks preserving the symplectic structure, so-called symplectic networks (SympNets). With the symplectic networks, we show some numerical results about (\romannumeral1) solving the Hamiltonian systems by learning abundant data points over the phase space, and (\romannumeral2) predicting the phase flows by learning a series of points depending on time. All the experiments point out that the symplectic networks perform much more better than the fully-connected networks that without any prior information, especially in the task of predicting which is unable to do within the conventional numerical methods.