 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopo-ADV: Generating Topology-Driven Imperceptible Adversarial Point Clouds
Apr 10, 2026Deep neural networks for 3D point cloud understanding have achieved remarkable success in object classification and recognition, yet recent work shows that these models remain highly vulnerable to adversarial perturbations. Existing 3D attacks predominantly manipulate geometric properties such as point locations, curvature, or surface structure, implicitly assuming that preserving global shape fidelity preserves semantic content. In this work, we challenge this assumption and introduce the first topology-driven adversarial attack for point cloud deep learning. Our key insight is that the homological structure of a 3D object constitutes a previously unexplored vulnerability surface. We propose Topo-ADV, an end-to-end differentiable framework that incorporates persistent homology as an explicit optimization objective, enabling gradient-based manipulation of topological features during adversarial example generation. By embedding persistence diagrams through differentiable topological representations, our method jointly optimizes (i) a topology divergence loss that alters persistence, (ii) a misclassification objective, and (iii) geometric imperceptibility constraints that preserve visual plausibility. Experiments demonstrate that subtle topology-driven perturbations consistently achieve up to 100% attack success rates on benchmark datasets such as ModelNet40, ShapeNet Part, and ScanObjectNN using PointNet and DGCNN classifiers, while remaining geometrically indistinguishable from the original point clouds, beating state-of-the-art methods on various perceptibility metrics.
Greener Deep Reinforcement Learning: Analysis of Energy and Carbon Efficiency Across Atari Benchmarks
Sep 05, 2025The growing computational demands of deep reinforcement learning (DRL) have raised concerns about the environmental and economic costs of training large-scale models. While algorithmic efficiency in terms of learning performance has been extensively studied, the energy requirements, greenhouse gas emissions, and monetary costs of DRL algorithms remain largely unexplored. In this work, we present a systematic benchmarking study of the energy consumption of seven state-of-the-art DRL algorithms, namely DQN, TRPO, A2C, ARS, PPO, RecurrentPPO, and QR-DQN, implemented using Stable Baselines. Each algorithm was trained for one million steps each on ten Atari 2600 games, and power consumption was measured in real-time to estimate total energy usage, CO2-Equivalent emissions, and electricity cost based on the U.S. national average electricity price. Our results reveal substantial variation in energy efficiency and training cost across algorithms, with some achieving comparable performance while consuming up to 24% less energy (ARS vs. DQN), emitting nearly 68% less CO2, and incurring almost 68% lower monetary cost (QR-DQN vs. RecurrentPPO) than less efficient counterparts. We further analyze the trade-offs between learning performance, training time, energy use, and financial cost, highlighting cases where algorithmic choices can mitigate environmental and economic impact without sacrificing learning performance. This study provides actionable insights for developing energy-aware and cost-efficient DRL practices and establishes a foundation for incorporating sustainability considerations into future algorithmic design and evaluation.
Bounomodes: the grazing ox algorithm for exploration of clustered anomalies
Jul 09, 2025A common class of algorithms for informative path planning (IPP) follows boustrophedon ("as the ox turns") patterns, which aim to achieve uniform area coverage. However, IPP is often applied in scenarios where anomalies, such as plant diseases, pollution, or hurricane damage, appear in clusters. In such cases, prioritizing the exploration of anomalous regions over uniform coverage is beneficial. This work introduces a class of algorithms referred to as bounom\=odes ("as the ox grazes"), which alternates between uniform boustrophedon sampling and targeted exploration of detected anomaly clusters. While uniform sampling can be designed using geometric principles, close exploration of clusters depends on the spatial distribution of anomalies and must be learned. In our implementation, the close exploration behavior is learned using deep reinforcement learning algorithms. Experimental evaluations demonstrate that the proposed approach outperforms several established baselines.
A Language-Driven Framework for Improving Personalized Recommendations: Merging LLMs with Traditional Algorithms
Jul 09, 2025Traditional recommendation algorithms are not designed to provide personalized recommendations based on user preferences provided through text, e.g., "I enjoy light-hearted comedies with a lot of humor". Large Language Models (LLMs) have emerged as one of the most promising tools for natural language processing in recent years. This research proposes a novel framework that mimics how a close friend would recommend items based on their knowledge of an individual's tastes. We leverage LLMs to enhance movie recommendation systems by refining traditional algorithm outputs and integrating them with language-based user preference inputs. We employ Singular Value Decomposition (SVD) or SVD++ algorithms to generate initial movie recommendations, implemented using the Surprise Python library and trained on the MovieLens-Latest-Small dataset. We compare the performance of the base algorithms with our LLM-enhanced versions using leave-one-out validation hit rates and cumulative hit rates. Additionally, to compare the performance of our framework against the current state-of-the-art recommendation systems, we use rating and ranking metrics with an item-based stratified 0.75 train, 0.25 test split. Our framework can generate preference profiles automatically based on users' favorite movies or allow manual preference specification for more personalized results. Using an automated approach, our framework overwhelmingly surpassed SVD and SVD++ on every evaluation metric used (e.g., improvements of up to ~6x in cumulative hit rate, ~3.7x in NDCG, etc.), albeit at the cost of a slight increase in computational overhead.
Energy-Aware Coverage Planning for Heterogeneous Multi-Robot System
Nov 04, 2024



We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy characteristics, such as capacity and depletion rates, due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws consider capacity differences but assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots; for instance, UAVs hover at different altitudes, and these changes could be dynamically updated based on their assigned tasks. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy dynamics and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations and real-world demonstrations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy.
Waterberry Farms: A Novel Benchmark For Informative Path Planning
May 10, 2023Recent developments in robotic and sensor hardware make data collection with mobile robots (ground or aerial) feasible and affordable to a wide population of users. The newly emergent applications, such as precision agriculture, weather damage assessment, or personal home security often do not satisfy the simplifying assumptions made by previous research: the explored areas have complex shapes and obstacles, multiple phenomena need to be sensed and estimated simultaneously and the measured quantities might change during observations. The future progress of path planning and estimation algorithms requires a new generation of benchmarks that provide representative environments and scoring methods that capture the demands of these applications. This paper describes the Waterberry Farms benchmark (WBF) that models a precision agriculture application at a Florida farm growing multiple crop types. The benchmark captures the dynamic nature of the spread of plant diseases and variations of soil humidity while the scoring system measures the performance of a given combination of a movement policy and an information model estimator. By benchmarking several examples of representative path planning and estimator algorithms, we demonstrate WBF's ability to provide insight into their properties and quantify future progress.
Deep Recurrent Q-learning for Energy-constrained Coverage with a Mobile Robot
Oct 01, 2022



In this paper, we study the problem of coverage of an environment with an energy-constrained robot in the presence of multiple charging stations. As the robot's on-board power supply is limited, it might not have enough energy to cover all the points in the environment with a single charge. Instead, it will need to stop at one or more charging stations to recharge its battery intermittently. The robot cannot violate the energy constraint, i.e., visit a location with negative available energy. To solve this problem, we propose a deep Q-learning framework that produces a policy to maximize the coverage and minimize the budget violations. Our proposed framework also leverages the memory of a recurrent neural network (RNN) to better suit this multi-objective optimization problem. We have tested the presented framework within a 16 x 16 grid environment having charging stations and various obstacle configurations. Results show that our proposed method finds feasible solutions and outperforms a comparable existing technique.
Uniform Circle Formation By Oblivious Swarm Robots
Dec 13, 2020



In this paper, we study the circle formation problem by multiple autonomous and homogeneous disc-shaped robots (also known as fat robots). The goal of the robots is to place themselves on the periphery of a circle. Circle formation has many real-world applications, such as boundary surveillance. This paper addresses one variant of such problem { uniform circle formation, where the robots have to be equidistant apart. The robots operate by executing cycles of the states wait-look-compute-move. They are oblivious, indistinguishable, anonymous, and do not communicate via message passing. First, we solve the uniform circle formation problem while assuming the robots to be transparent. Next, we address an even weaker model, where the robots are non-transparent and have limited visibility. We propose novel distributed algorithms to solve these variants. Our presented algorithms in this paper are proved to be correct and guarantee to prevent collision and deadlock among the swarm of robots.
A Constant-Factor Approximation Algorithm for Online Coverage Path Planning with Energy Constraint
Jun 27, 2019



In this paper, we study the problem of coverage planning by a mobile robot with a limited energy budget. The objective of the robot is to cover every point in the environment while minimizing the traveled path length. The environment is initially unknown to the robot. Therefore, it needs to avoid the obstacles in the environment on-the-fly during the exploration. As the robot has a specific energy budget, it might not be able to cover the complete environment in one traversal. Instead, it will need to visit a static charging station periodically in order to recharge its energy. To solve the stated problem, we propose a budgeted depth-first search (DFS)-based exploration strategy that helps the robot to cover any unknown planar environment while bounding the maximum path length to a constant-factor of the shortest-possible path length. Our $O(1)$-approximation guarantee advances the state-of-the-art of log-approximation for this problem. Simulation results show that our proposed algorithm outperforms the current state-of-the-art algorithm both in terms of the traveled path length and run time in all the tested environments with concave and convex obstacles.
Fault Area Detection in Leaf Diseases using k-means Clustering
Oct 24, 2018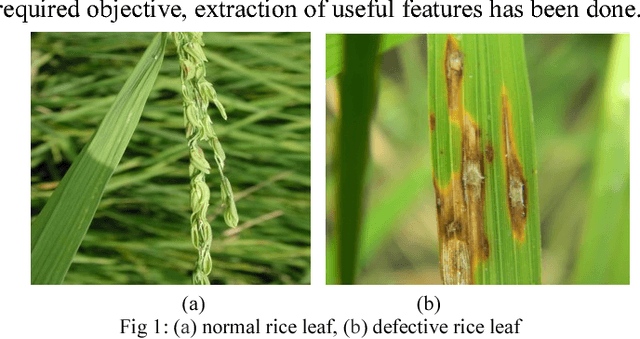
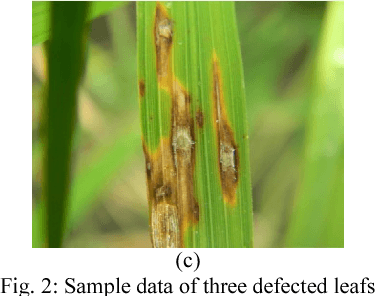
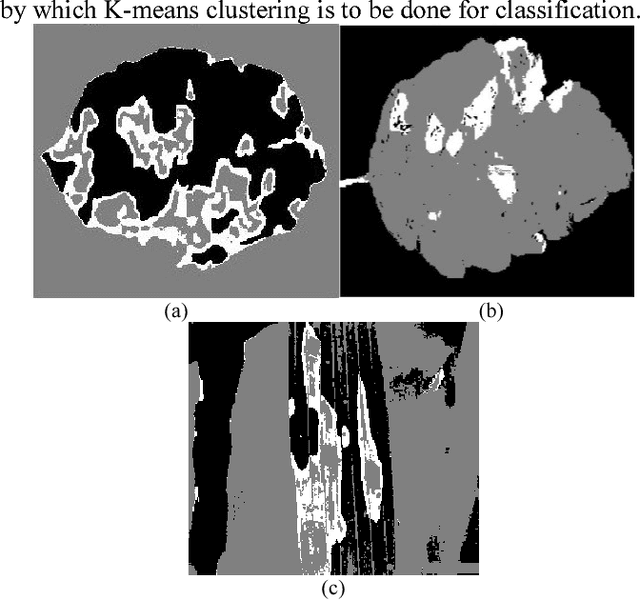
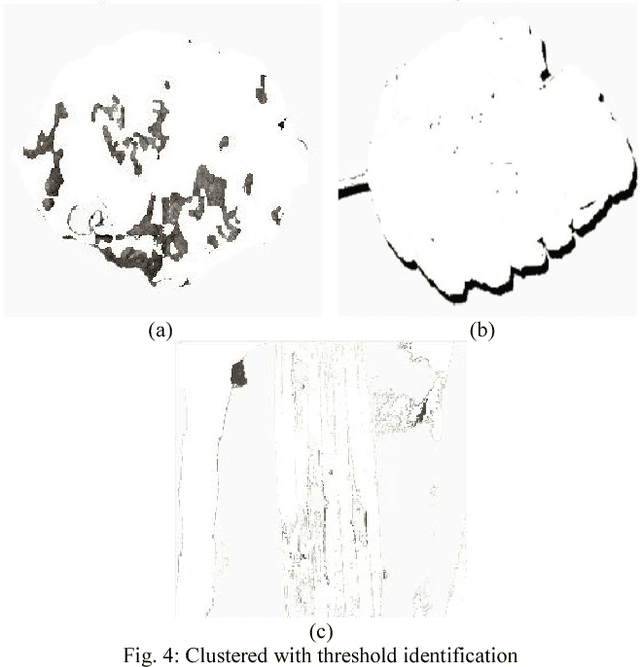
With increasing population the crisis of food is getting bigger day by day.In this time of crisis,the leaf disease of crops is the biggest problem in the food industry.In this paper, we have addressed that problem and proposed an efficient method to detect leaf disease.Leaf diseases can be detected from sample images of the leaf with the help of image processing and segmentation.Using k-means clustering and Otsu's method the faulty region in a leaf is detected which helps to determine proper course of action to be taken.Further the ratio of normal and faulty region if calculated would be able to predict if the leaf can be cured at all.