 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Graph Isomorphism-based Decentralized Algorithm for Modular Robot Configuration Formation
Feb 09, 2016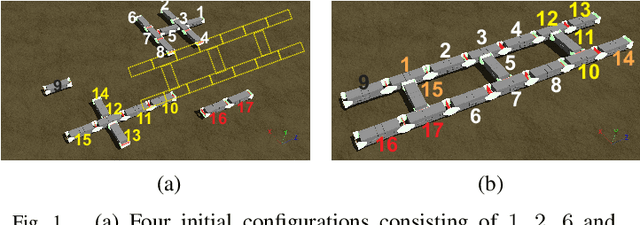
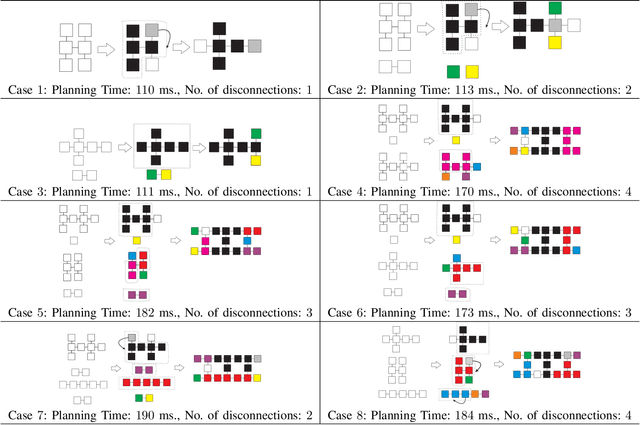
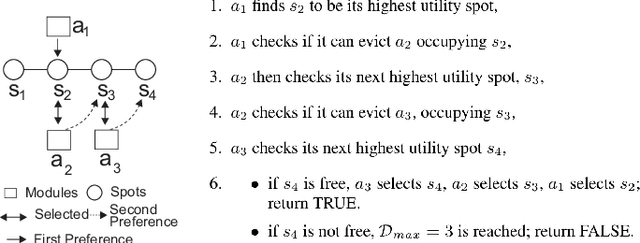
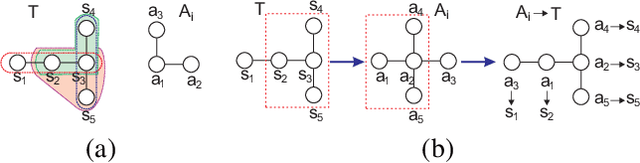
We consider the problem of configuration formation in modular robot systems where a set of modules that are initially in different configurations and located at different locations are required to assume appropriate positions so that they can get into a new, user-specified, target configuration. We propose a novel algorithm based on graph isomorphism, where the modules select locations or spots in the target configuration using a utility-based framework, while retaining their original configuration to the greatest extent possible, to reduce the time and energy required by the modules to assume the target configuration. We have shown analytically that our proposed algorithm is complete and guarantees a Pareto-optimal allocation. Experimental simulations of our algorithm with different number of modules in different initial configurations and located initially at different locations, show that the planning time of our algorithm is nominal (order of msec. for 100 modules). We have also compared our algorithm against a market-based allocation algorithm and shown that our proposed algorithm performs better in terms of time and number of messages exchanged.