 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGreener Deep Reinforcement Learning: Analysis of Energy and Carbon Efficiency Across Atari Benchmarks
Sep 05, 2025The growing computational demands of deep reinforcement learning (DRL) have raised concerns about the environmental and economic costs of training large-scale models. While algorithmic efficiency in terms of learning performance has been extensively studied, the energy requirements, greenhouse gas emissions, and monetary costs of DRL algorithms remain largely unexplored. In this work, we present a systematic benchmarking study of the energy consumption of seven state-of-the-art DRL algorithms, namely DQN, TRPO, A2C, ARS, PPO, RecurrentPPO, and QR-DQN, implemented using Stable Baselines. Each algorithm was trained for one million steps each on ten Atari 2600 games, and power consumption was measured in real-time to estimate total energy usage, CO2-Equivalent emissions, and electricity cost based on the U.S. national average electricity price. Our results reveal substantial variation in energy efficiency and training cost across algorithms, with some achieving comparable performance while consuming up to 24% less energy (ARS vs. DQN), emitting nearly 68% less CO2, and incurring almost 68% lower monetary cost (QR-DQN vs. RecurrentPPO) than less efficient counterparts. We further analyze the trade-offs between learning performance, training time, energy use, and financial cost, highlighting cases where algorithmic choices can mitigate environmental and economic impact without sacrificing learning performance. This study provides actionable insights for developing energy-aware and cost-efficient DRL practices and establishes a foundation for incorporating sustainability considerations into future algorithmic design and evaluation.
Bounomodes: the grazing ox algorithm for exploration of clustered anomalies
Jul 09, 2025A common class of algorithms for informative path planning (IPP) follows boustrophedon ("as the ox turns") patterns, which aim to achieve uniform area coverage. However, IPP is often applied in scenarios where anomalies, such as plant diseases, pollution, or hurricane damage, appear in clusters. In such cases, prioritizing the exploration of anomalous regions over uniform coverage is beneficial. This work introduces a class of algorithms referred to as bounom\=odes ("as the ox grazes"), which alternates between uniform boustrophedon sampling and targeted exploration of detected anomaly clusters. While uniform sampling can be designed using geometric principles, close exploration of clusters depends on the spatial distribution of anomalies and must be learned. In our implementation, the close exploration behavior is learned using deep reinforcement learning algorithms. Experimental evaluations demonstrate that the proposed approach outperforms several established baselines.
Generative Nowcasting of Marine Fog Visibility in the Grand Banks area and Sable Island in Canada
Feb 09, 2024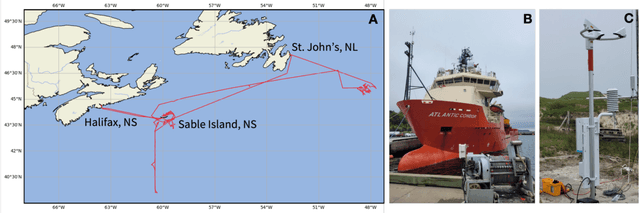
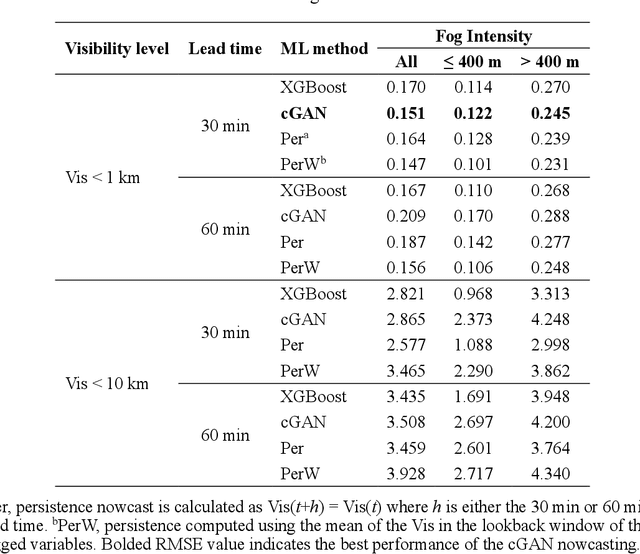
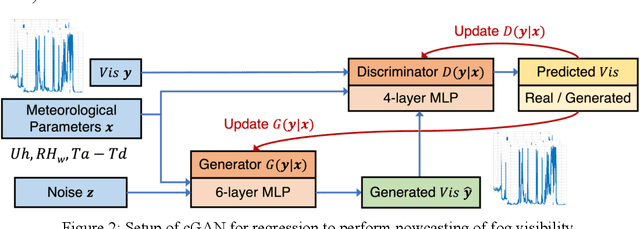
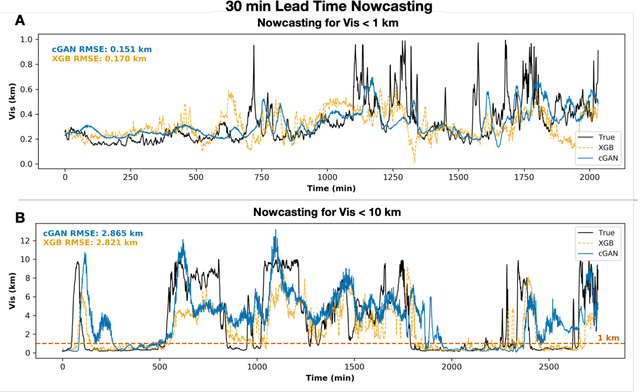
This study presents the application of generative deep learning techniques to evaluate marine fog visibility nowcasting using the FATIMA (Fog and turbulence interactions in the marine atmosphere) campaign observations collected during July 2022 in the North Atlantic in the Grand Banks area and vicinity of Sable Island (SI), northeast of Canada. The measurements were collected using the Vaisala Forward Scatter Sensor model FD70 and Weather Transmitter model WXT50, and Gill R3A ultrasonic anemometer mounted on the Research Vessel Atlantic Condor. To perform nowcasting, the time series of fog visibility (Vis), wind speed, dew point depression, and relative humidity with respect to water were preprocessed to have lagged time step features. Generative nowcasting of Vis time series for lead times of 30 and 60 minutes were performed using conditional generative adversarial networks (cGAN) regression at visibility thresholds of Vis < 1 km and < 10 km. Extreme gradient boosting (XGBoost) was used as a baseline method for comparison against cGAN. At the 30 min lead time, Vis was best predicted with cGAN at Vis < 1 km (RMSE = 0.151 km) and with XGBoost at Vis < 10 km (RMSE = 2.821 km). At the 60 min lead time, Vis was best predicted with XGBoost at Vis < 1 km (RMSE = 0.167 km) and Vis < 10 km (RMSE = 3.508 km), but the cGAN RMSE was similar to XGBoost. Despite nowcasting Vis at 30 min being quite difficult, the ability of the cGAN model to track the variation in Vis at 1 km suggests that there is potential for generative analysis of marine fog visibility using observational meteorological parameters.
Waterberry Farms: A Novel Benchmark For Informative Path Planning
May 10, 2023Recent developments in robotic and sensor hardware make data collection with mobile robots (ground or aerial) feasible and affordable to a wide population of users. The newly emergent applications, such as precision agriculture, weather damage assessment, or personal home security often do not satisfy the simplifying assumptions made by previous research: the explored areas have complex shapes and obstacles, multiple phenomena need to be sensed and estimated simultaneously and the measured quantities might change during observations. The future progress of path planning and estimation algorithms requires a new generation of benchmarks that provide representative environments and scoring methods that capture the demands of these applications. This paper describes the Waterberry Farms benchmark (WBF) that models a precision agriculture application at a Florida farm growing multiple crop types. The benchmark captures the dynamic nature of the spread of plant diseases and variations of soil humidity while the scoring system measures the performance of a given combination of a movement policy and an information model estimator. By benchmarking several examples of representative path planning and estimator algorithms, we demonstrate WBF's ability to provide insight into their properties and quantify future progress.