 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-Aware Coverage Planning for Heterogeneous Multi-Robot System
Nov 04, 2024



We propose a distributed control law for a heterogeneous multi-robot coverage problem, where the robots could have different energy characteristics, such as capacity and depletion rates, due to their varying sizes, speeds, capabilities, and payloads. Existing energy-aware coverage control laws consider capacity differences but assume the battery depletion rate to be the same for all robots. In realistic scenarios, however, some robots can consume energy much faster than other robots; for instance, UAVs hover at different altitudes, and these changes could be dynamically updated based on their assigned tasks. Robots' energy capacities and depletion rates need to be considered to maximize the performance of a multi-robot system. To this end, we propose a new energy-aware controller based on Lloyd's algorithm to adapt the weights of the robots based on their energy dynamics and divide the area of interest among the robots accordingly. The controller is theoretically analyzed and extensively evaluated through simulations and real-world demonstrations in multiple realistic scenarios and compared with three baseline control laws to validate its performance and efficacy.
Anchor-Oriented Localized Voronoi Partitioning for GPS-denied Multi-Robot Coverage
Jul 08, 2024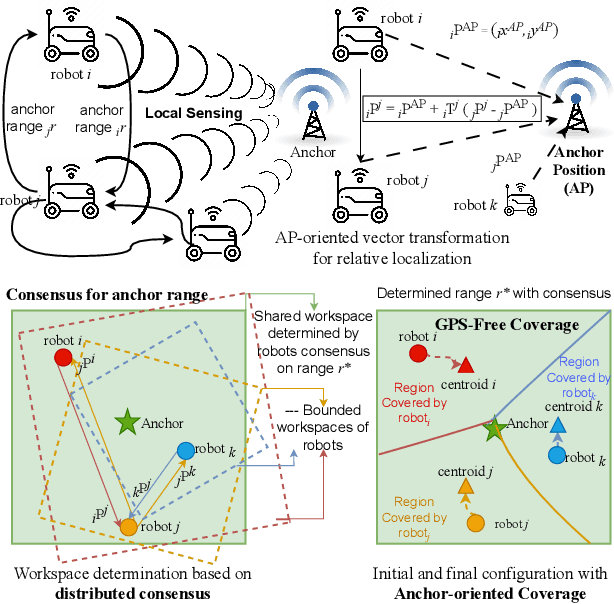
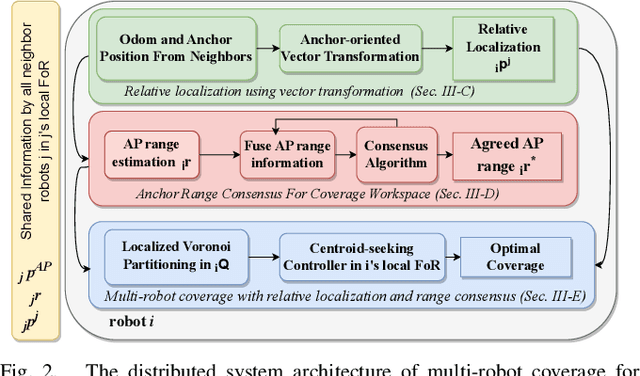


Multi-robot coverage is crucial in numerous applications, including environmental monitoring, search and rescue operations, and precision agriculture. In modern applications, a multi-robot team must collaboratively explore unknown spatial fields in GPS-denied and extreme environments where global localization is unavailable. Coverage algorithms typically assume that the robot positions and the coverage environment are defined in a global reference frame. However, coordinating robot motion and ensuring coverage of the shared convex workspace without global localization is challenging. This paper proposes a novel anchor-oriented coverage (AOC) approach to generate dynamic localized Voronoi partitions based around a common anchor position. We further propose a consensus-based coordination algorithm that achieves agreement on the coverage workspace around the anchor in the robots' relative frames of reference. Through extensive simulations and real-world experiments, we demonstrate that the proposed anchor-oriented approach using localized Voronoi partitioning performs as well as the state-of-the-art coverage controller using GPS.
Energy-Aware Multi-Robot Task Allocation in Persistent Tasks
Dec 31, 2021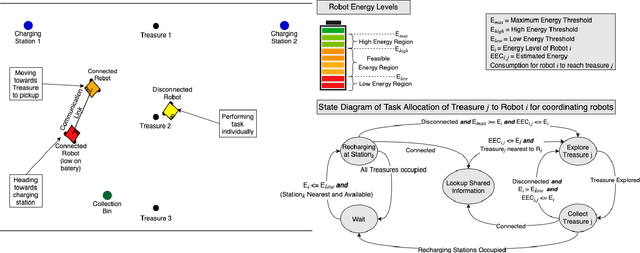
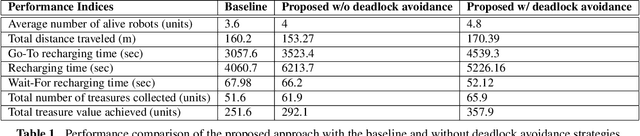
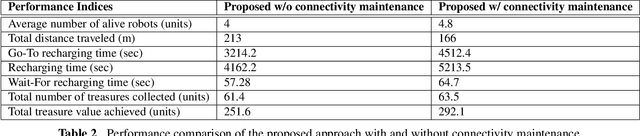
The applicability of the swarm robots to perform foraging tasks is inspired by their compact size and cost. A considerable amount of energy is required to perform such tasks, especially if the tasks are continuous and/or repetitive. Real-world situations in which robots perform tasks continuously while staying alive (survivability) and maximizing production (performance) require energy awareness. This paper proposes an energy-conscious distributed task allocation algorithm to solve continuous tasks (e.g., unlimited foraging) for cooperative robots to achieve highly effective missions. We consider efficiency as a function of the energy consumed by the robot during exploration and collection when food is returned to the collection bin. Finally, the proposed energy-efficient algorithm minimizes the total transit time to the charging station and time consumed while recharging and maximizes the robot's lifetime to perform maximum tasks to enhance the overall efficiency of collaborative robots. We evaluated the proposed solution against a typical greedy benchmarking strategy (assigning the closest collection bin to the available robot and recharging the robot at maximum) for efficiency and performance in various scenarios. The proposed approach significantly improved performance and efficiency over the baseline approach.
Analysis of Exploration vs. Exploitation in Adaptive Information Sampling
Nov 22, 2021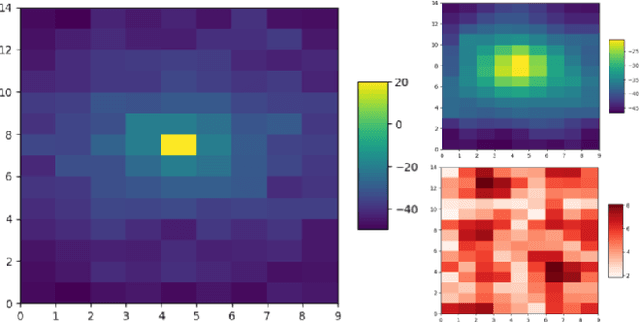
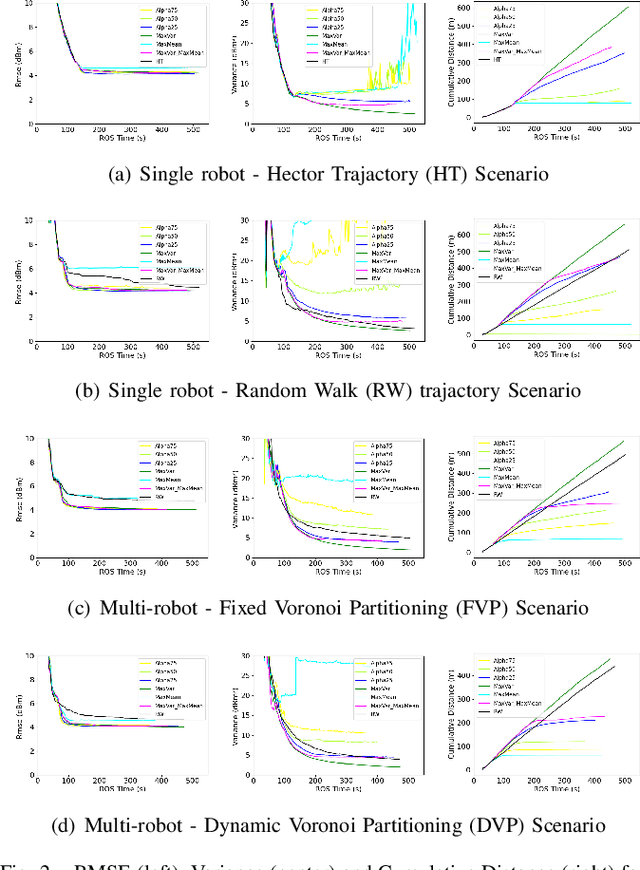
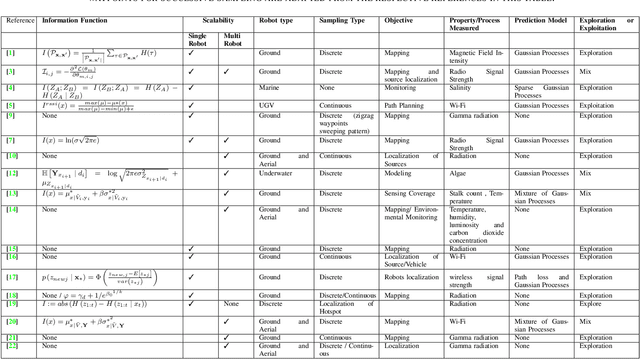
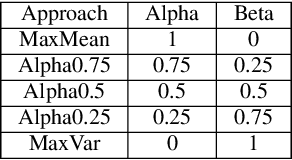
Adaptive information sampling approaches enable efficient selection of mobile robot's waypoints through which accurate sensing and mapping of a physical process, such as the radiation or field intensity, can be obtained. This paper analyzes the role of exploration and exploitation in such information-theoretic spatial sampling of the environmental processes. We use Gaussian processes to predict and estimate predictions with confidence bounds, thereby determining each point's informativeness in terms of exploration and exploitation. Specifically, we use a Gaussian process regression model to sample the Wi-Fi signal strength of the environment. For different variants of the informative function, we extensively analyze and evaluate the effectiveness and efficiency of information mapping through two different initial trajectories in both single robot and multi-robot settings. The results provide meaningful insights in choosing appropriate information function based on sampling objectives.