 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDATAMUt: Deterministic Algorithms for Time-Delay Attack Detection in Multi-Hop UAV Networks
May 12, 2025Unmanned Aerial Vehicles (UAVs), also known as drones, have gained popularity in various fields such as agriculture, emergency response, and search and rescue operations. UAV networks are susceptible to several security threats, such as wormhole, jamming, spoofing, and false data injection. Time Delay Attack (TDA) is a unique attack in which malicious UAVs intentionally delay packet forwarding, posing significant threats, especially in time-sensitive applications. It is challenging to distinguish malicious delay from benign network delay due to the dynamic nature of UAV networks, intermittent wireless connectivity, or the Store-Carry-Forward (SCF) mechanism during multi-hop communication. Some existing works propose machine learning-based centralized approaches to detect TDA, which are computationally intensive and have large message overheads. This paper proposes a novel approach DATAMUt, where the temporal dynamics of the network are represented by a weighted time-window graph (TWiG), and then two deterministic polynomial-time algorithms are presented to detect TDA when UAVs have global and local network knowledge. Simulation studies show that the proposed algorithms have reduced message overhead by a factor of five and twelve in global and local knowledge, respectively, compared to existing approaches. Additionally, our approaches achieve approximately 860 and 1050 times less execution time in global and local knowledge, respectively, outperforming the existing methods.
A Novel Multi-Layer Framework for BVLoS Drone Operation: A Preliminary Study
Jan 14, 2023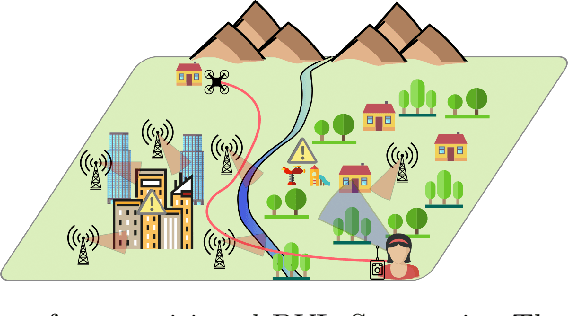
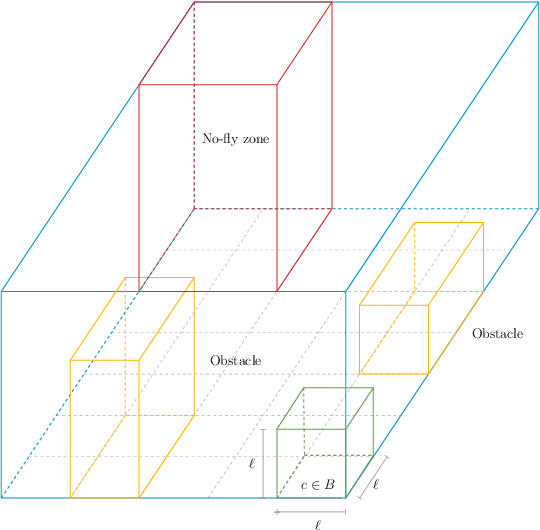
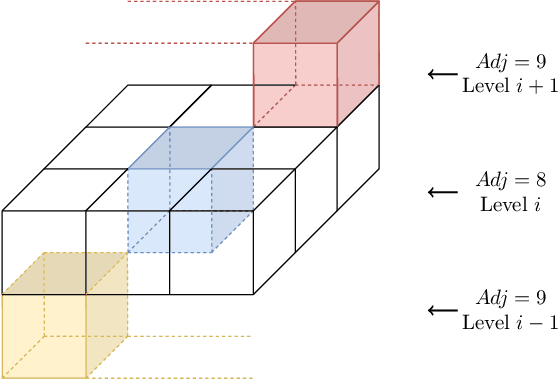
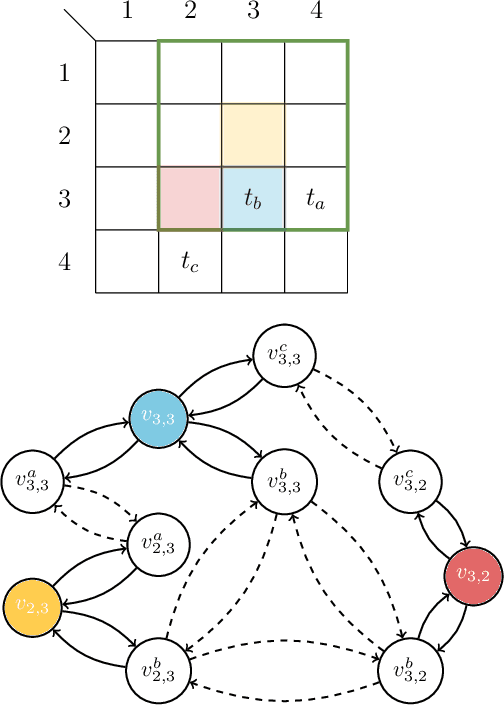
Drones have become increasingly popular in a variety of fields, including agriculture, emergency response, and package delivery. However, most drone operations are currently limited to within Visual Line of Sight (vlos) due to safety concerns. Flying drones Beyond Visual Line of Sight (bvlos) presents new challenges and opportunities, but also requires new technologies and regulatory frameworks, not yet implemented, to ensure that the drone is constantly under the control of a remote operator. In this preliminary study, we assume to remotely control the drone using the available ground cellular network infrastructure. We propose to plan bvlos drone operations using a novel multi-layer framework that includes many layers of constraints that closely resemble real-world scenarios and challenges. These layers include information such as the potential ground risk in the event of a drone failure, the available ground cellular network infrastructure, and the presence of ground obstacles. From the multi-layer framework, a graph is constructed whose edges are weighted with a dependability score that takes into account the information of the multi-layer framework. Then, the planning of bvlos drone missions is equivalent to solving the Maximum Path Dependability Problem on the constructed graph, which turns out to be solvable by applying Dijkstra's algorithm.
Uniform Circle Formation By Oblivious Swarm Robots
Dec 13, 2020



In this paper, we study the circle formation problem by multiple autonomous and homogeneous disc-shaped robots (also known as fat robots). The goal of the robots is to place themselves on the periphery of a circle. Circle formation has many real-world applications, such as boundary surveillance. This paper addresses one variant of such problem { uniform circle formation, where the robots have to be equidistant apart. The robots operate by executing cycles of the states wait-look-compute-move. They are oblivious, indistinguishable, anonymous, and do not communicate via message passing. First, we solve the uniform circle formation problem while assuming the robots to be transparent. Next, we address an even weaker model, where the robots are non-transparent and have limited visibility. We propose novel distributed algorithms to solve these variants. Our presented algorithms in this paper are proved to be correct and guarantee to prevent collision and deadlock among the swarm of robots.
Uniform Scattering of Robots on Alternate Nodes of a Grid
Dec 13, 2020

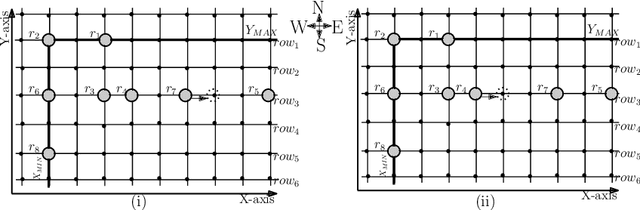

In this paper, we propose a distributed algorithm to uniformly scatter the robots along a grid, with robots on alternate nodes of this grid distribution. These homogeneous, autonomous mobile robots place themselves equidistant apart on the grid, which can be required for guarding or covering a geographical area by the robots. The robots operate by executing cycles of the states "look-compute-move". In the look phase, it looks to see the position of the other robots; in the compute phase, it computes a destination to move to; and then in the move phase, it moves to that computed destination. They do not interact by message passing and can recollect neither the past actions nor the looked data from the previous cycle, i.e., oblivious. The robots are semi-synchronous, anonymous and have unlimited visibility. Eventually, the robots uniformly distribute themselves on alternate nodes of a grid, leaving the adjacent nodes of the grid vacant. The algorithm presented also assures no collision or deadlock among the robots.