 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDEKC: Data-Enable Control for Tethered Space Robot Deployment in the Presence of Uncertainty via Koopman Operator Theory
Jun 10, 2025This work focuses the deployment of tethered space robot in the presence of unknown uncertainty. A data-enable framework called DEKC which contains offline training part and online execution part is proposed to deploy tethered space robot in the presence of uncertainty. The main idea of this work is modeling the unknown uncertainty as a dynamical system, which enables high accuracy and convergence of capturing uncertainty. The core part of proposed framework is a proxy model of uncertainty, which is derived from data-driven Koopman theory and is separated with controller design. In the offline stage, the lifting functions associated with Koopman operator are parameterized with deep neural networks. Then by solving an optimization problem, the lifting functions are learned from sampling data. In the online execution stage, the proxy model cooperates the learned lifting functions obtained in the offline phase to capture the unknown uncertainty. Then the output of proxy model is compensated to the baseline controller such that the effect of uncertainty can be attenuated or even eliminated. Furthermore, considering some scenarios in which the performance of proxy model may weaken, a receding-horizon scheme is proposed to update the proxy model online. Finally, the extensive numerical simulations demonstrate the effectiveness of our proposed framework. The implementation of proposed DEKC framework is publicly available at https://github.com/NPU-RCIR/DEKC.git.
Neural Predictor for Flight Control with Payload
Oct 21, 2024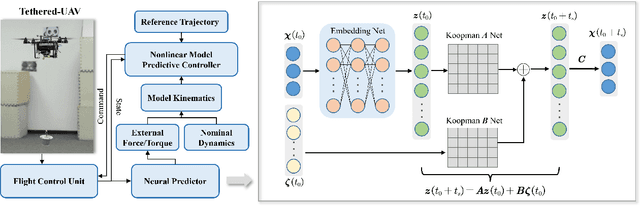
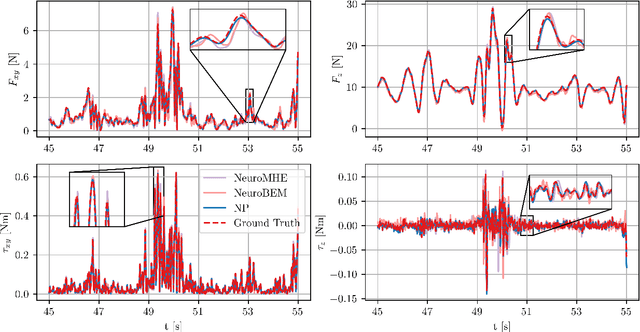

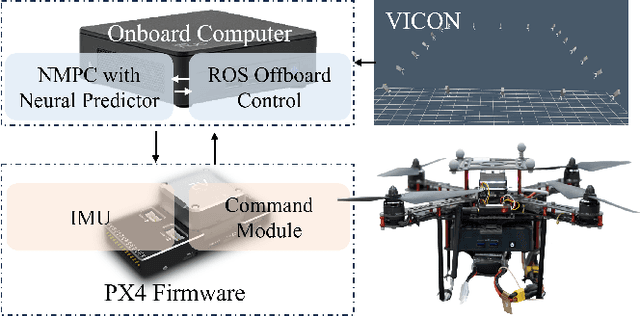
Aerial robotics for transporting suspended payloads as the form of freely-floating manipulator are growing great interest in recent years. However, the prior information of the payload, such as the mass, is always hard to obtain accurately in practice. The force/torque caused by payload and residual dynamics will introduce unmodeled perturbations to the system, which negatively affects the closed-loop performance. Different from estimation-like methods, this paper proposes Neural Predictor, a learning-based approach to model force/torque caused by payload and residual dynamics as a dynamical system. It results a hybrid model including both the first-principles dynamics and the learned dynamics. This hybrid model is then integrated into a MPC framework to improve closed-loop performance. Effectiveness of proposed framework is verified extensively in both numerical simulations and real-world flight experiments. The results indicate that our approach can capture force/torque caused by payload and residual dynamics accurately, respond quickly to the changes of them and improve the closed-loop performance significantly. In particular, Neural Predictor outperforms a state-of-the-art learning-based estimator and has reduced the force and torque estimation errors by up to 66.15% and 33.33% while using less samples.
Exploiting Polarized Material Cues for Robust Car Detection
Jan 05, 2024



Car detection is an important task that serves as a crucial prerequisite for many automated driving functions. The large variations in lighting/weather conditions and vehicle densities of the scenes pose significant challenges to existing car detection algorithms to meet the highly accurate perception demand for safety, due to the unstable/limited color information, which impedes the extraction of meaningful/discriminative features of cars. In this work, we present a novel learning-based car detection method that leverages trichromatic linear polarization as an additional cue to disambiguate such challenging cases. A key observation is that polarization, characteristic of the light wave, can robustly describe intrinsic physical properties of the scene objects in various imaging conditions and is strongly linked to the nature of materials for cars (e.g., metal and glass) and their surrounding environment (e.g., soil and trees), thereby providing reliable and discriminative features for robust car detection in challenging scenes. To exploit polarization cues, we first construct a pixel-aligned RGB-Polarization car detection dataset, which we subsequently employ to train a novel multimodal fusion network. Our car detection network dynamically integrates RGB and polarization features in a request-and-complement manner and can explore the intrinsic material properties of cars across all learning samples. We extensively validate our method and demonstrate that it outperforms state-of-the-art detection methods. Experimental results show that polarization is a powerful cue for car detection.
Data-Driven Optimal Control of Tethered Space Robot Deployment with Learning Based Koopman Operator
Jul 15, 2023To avoid complex constraints of the traditional nonlinear method for tethered space robot (TSR) deployment, this paper proposes a data-driven optimal control framework with an improved deep learning based Koopman operator that could be applied to complex environments. In consideration of TSR's nonlinearity, its finite dimensional lifted representation is derived with the state-dependent only embedding functions in the Koopman framework. A deep learning approach is adopted to approximate the global linear representation of TSR. Deep neural networks (DNN) are developed to parameterize Koopman operator and its embedding functions. An auxiliary neural network is developed to encode the nonlinear control term of finite dimensional lifted system. In addition, the state matrix A and control matrix B of lifted linear system in the embedding space are also estimated during training DNN. Then three loss functions that related to reconstruction and prediction ability of network and controllability of lifted linear system are designed for training the entire network. With the global linear system produced from DNN, Linear Quadratic Regulator (LQR) is applied to derive the optimal control policy for the TSR deployment. Finally, simulation results verify the effectiveness of proposed framework and show that it could deploy tethered space robot more quickly with less swing of in-plane angle.