 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Predictor for Flight Control with Payload
Paper and Code
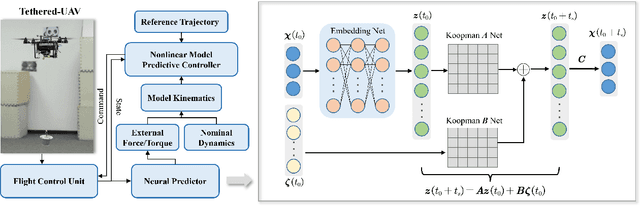
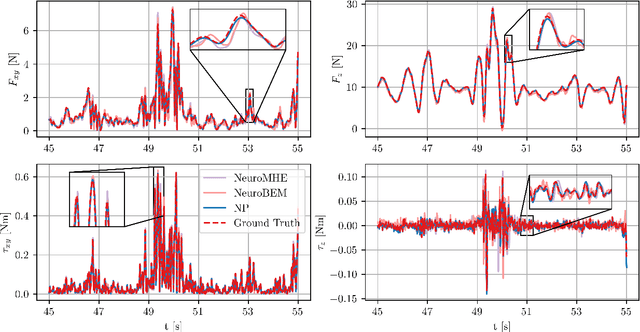

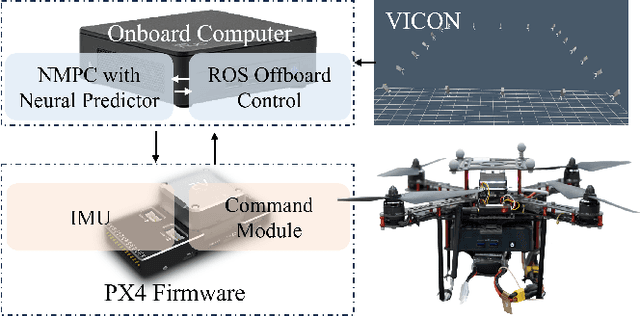
Aerial robotics for transporting suspended payloads as the form of freely-floating manipulator are growing great interest in recent years. However, the prior information of the payload, such as the mass, is always hard to obtain accurately in practice. The force/torque caused by payload and residual dynamics will introduce unmodeled perturbations to the system, which negatively affects the closed-loop performance. Different from estimation-like methods, this paper proposes Neural Predictor, a learning-based approach to model force/torque caused by payload and residual dynamics as a dynamical system. It results a hybrid model including both the first-principles dynamics and the learned dynamics. This hybrid model is then integrated into a MPC framework to improve closed-loop performance. Effectiveness of proposed framework is verified extensively in both numerical simulations and real-world flight experiments. The results indicate that our approach can capture force/torque caused by payload and residual dynamics accurately, respond quickly to the changes of them and improve the closed-loop performance significantly. In particular, Neural Predictor outperforms a state-of-the-art learning-based estimator and has reduced the force and torque estimation errors by up to 66.15% and 33.33% while using less samples.