 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDEKC: Data-Enable Control for Tethered Space Robot Deployment in the Presence of Uncertainty via Koopman Operator Theory
Jun 10, 2025This work focuses the deployment of tethered space robot in the presence of unknown uncertainty. A data-enable framework called DEKC which contains offline training part and online execution part is proposed to deploy tethered space robot in the presence of uncertainty. The main idea of this work is modeling the unknown uncertainty as a dynamical system, which enables high accuracy and convergence of capturing uncertainty. The core part of proposed framework is a proxy model of uncertainty, which is derived from data-driven Koopman theory and is separated with controller design. In the offline stage, the lifting functions associated with Koopman operator are parameterized with deep neural networks. Then by solving an optimization problem, the lifting functions are learned from sampling data. In the online execution stage, the proxy model cooperates the learned lifting functions obtained in the offline phase to capture the unknown uncertainty. Then the output of proxy model is compensated to the baseline controller such that the effect of uncertainty can be attenuated or even eliminated. Furthermore, considering some scenarios in which the performance of proxy model may weaken, a receding-horizon scheme is proposed to update the proxy model online. Finally, the extensive numerical simulations demonstrate the effectiveness of our proposed framework. The implementation of proposed DEKC framework is publicly available at https://github.com/NPU-RCIR/DEKC.git.
Neural Predictor for Flight Control with Payload
Oct 21, 2024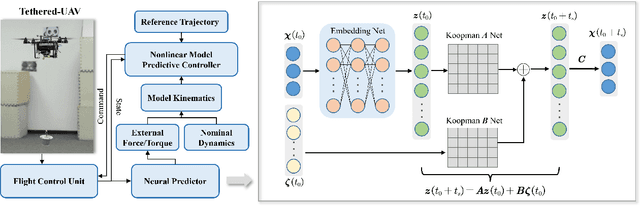
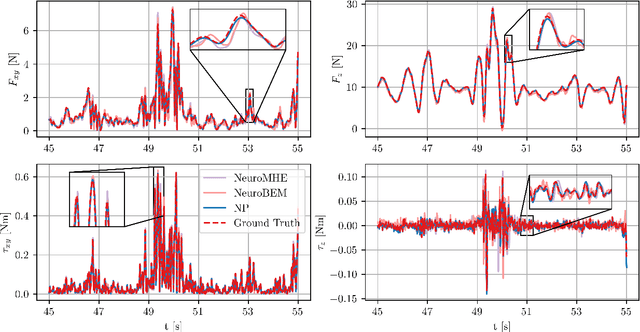

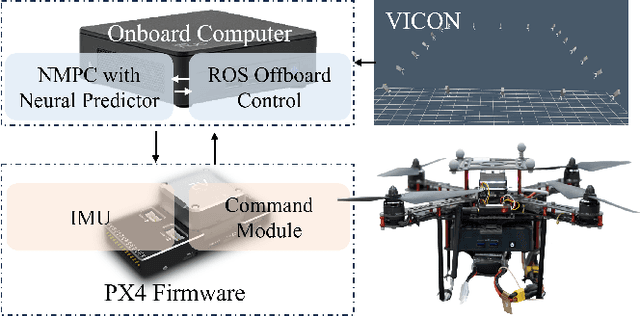
Aerial robotics for transporting suspended payloads as the form of freely-floating manipulator are growing great interest in recent years. However, the prior information of the payload, such as the mass, is always hard to obtain accurately in practice. The force/torque caused by payload and residual dynamics will introduce unmodeled perturbations to the system, which negatively affects the closed-loop performance. Different from estimation-like methods, this paper proposes Neural Predictor, a learning-based approach to model force/torque caused by payload and residual dynamics as a dynamical system. It results a hybrid model including both the first-principles dynamics and the learned dynamics. This hybrid model is then integrated into a MPC framework to improve closed-loop performance. Effectiveness of proposed framework is verified extensively in both numerical simulations and real-world flight experiments. The results indicate that our approach can capture force/torque caused by payload and residual dynamics accurately, respond quickly to the changes of them and improve the closed-loop performance significantly. In particular, Neural Predictor outperforms a state-of-the-art learning-based estimator and has reduced the force and torque estimation errors by up to 66.15% and 33.33% while using less samples.
Code-Switching Detection Using ASR-Generated Language Posteriors
Jun 19, 2019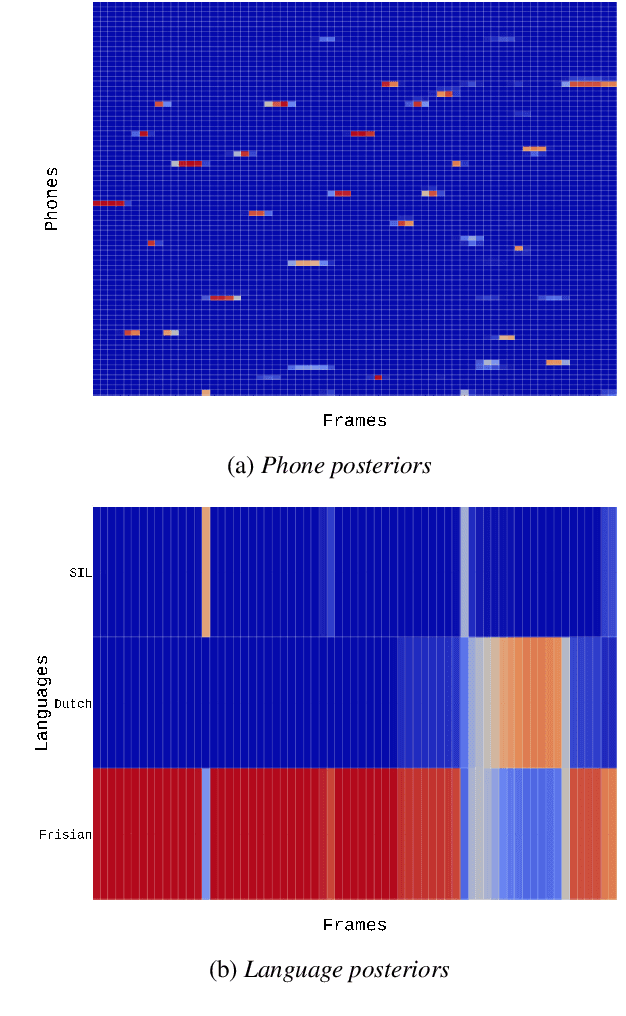
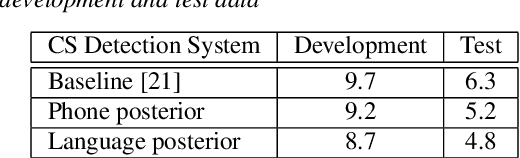
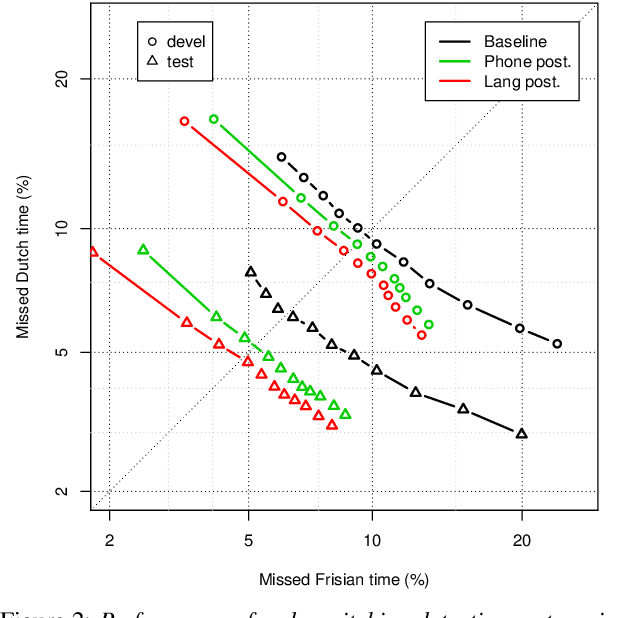
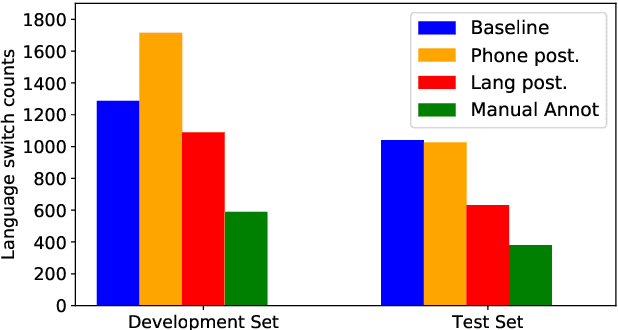
Code-switching (CS) detection refers to the automatic detection of language switches in code-mixed utterances. This task can be achieved by using a CS automatic speech recognition (ASR) system that can handle such language switches. In our previous work, we have investigated the code-switching detection performance of the Frisian-Dutch CS ASR system by using the time alignment of the most likely hypothesis and found that this technique suffers from over-switching due to numerous very short spurious language switches. In this paper, we propose a novel method for CS detection aiming to remedy this shortcoming by using the language posteriors which are the sum of the frame-level posteriors of phones belonging to the same language. The CS ASR-generated language posteriors contain more complete language-specific information on frame level compared to the time alignment of the ASR output. Hence, it is expected to yield more accurate and robust CS detection. The CS detection experiments demonstrate that the proposed language posterior-based approach provides higher detection accuracy than the baseline system in terms of equal error rate. Moreover, a detailed CS detection error analysis reveals that using language posteriors reduces the false alarms and results in more robust CS detection.