 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBistable SMA-driven engine for pulse-jet locomotion in soft aquatic robots
Apr 04, 2025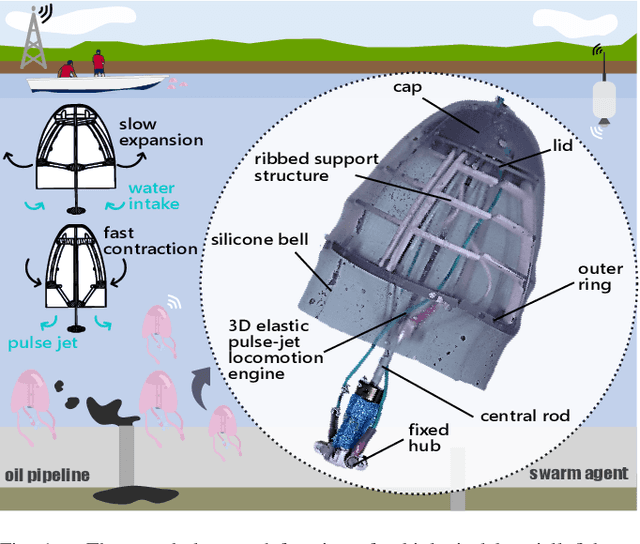
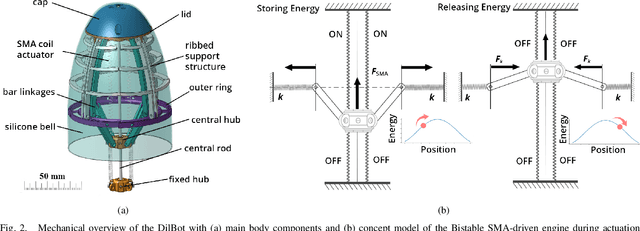
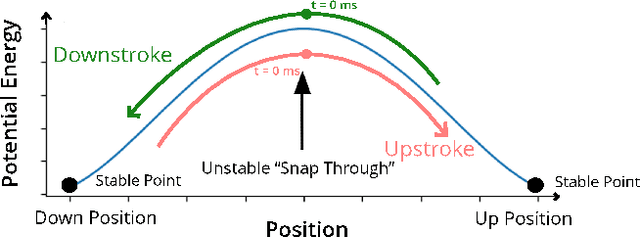
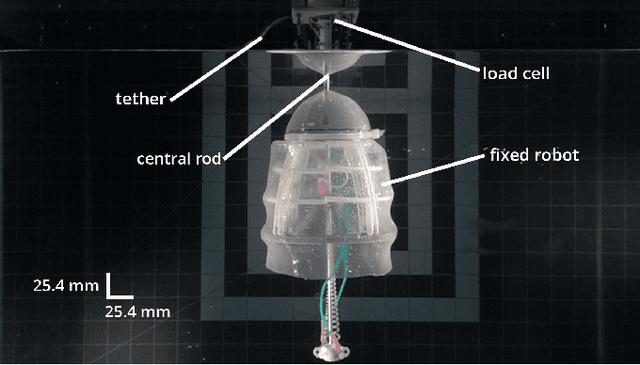
This paper presents the design and experimental validation of a bio-inspired soft aquatic robot, the DilBot, which uses a bistable shape memory alloy-driven engine for pulse-jet locomotion. Drawing inspiration from the efficient swimming mechanisms of box jellyfish, the DilBot incorporates antagonistic shape memory alloy springs encapsulated in silicone insulation to achieve high-power propulsion. The innovative bistable mechanism allows continuous swimming cycles by storing and releasing energy in a controlled manner. Through free-swimming experiments and force characterization tests, we evaluated the DilBot's performance, achieving a peak speed of 158 mm/s and generating a maximum thrust of 5.59 N. This work demonstrates a novel approach to enhancing the efficiency of shape memory alloy actuators in aquatic environments. It presents a promising pathway for future applications in underwater environmental monitoring using robotic swarms.
Deep Learning Approaches to Grasp Synthesis: A Review
Jul 06, 2022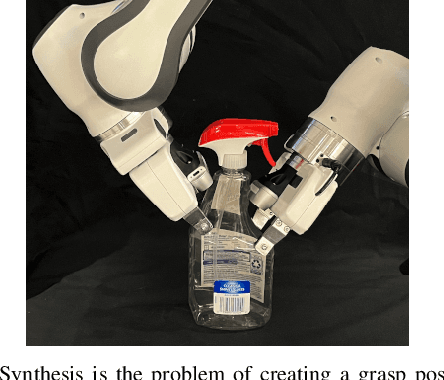
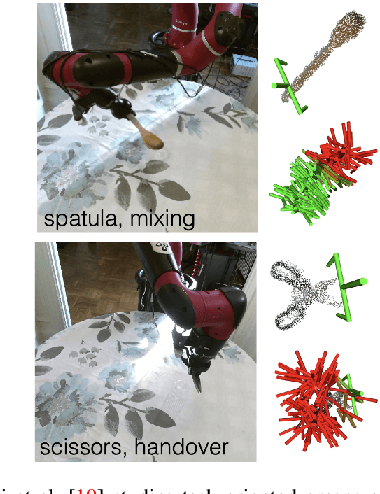
Grasping is the process of picking an object by applying forces and torques at a set of contacts. Recent advances in deep-learning methods have allowed rapid progress in robotic object grasping. We systematically surveyed the publications over the last decade, with a particular interest in grasping an object using all 6 degrees of freedom of the end-effector pose. Our review found four common methodologies for robotic grasping: sampling-based approaches, direct regression, reinforcement learning, and exemplar approaches. Furthermore, we found two 'supporting methods' around grasping that use deep-learning to support the grasping process, shape approximation, and affordances. We have distilled the publications found in this systematic review (85 papers) into ten key takeaways we consider crucial for future robotic grasping and manipulation research. An online version of the survey is available at https://rhys-newbury.github.io/projects/6dof/
Grasp success prediction with quality metrics
Sep 10, 2018
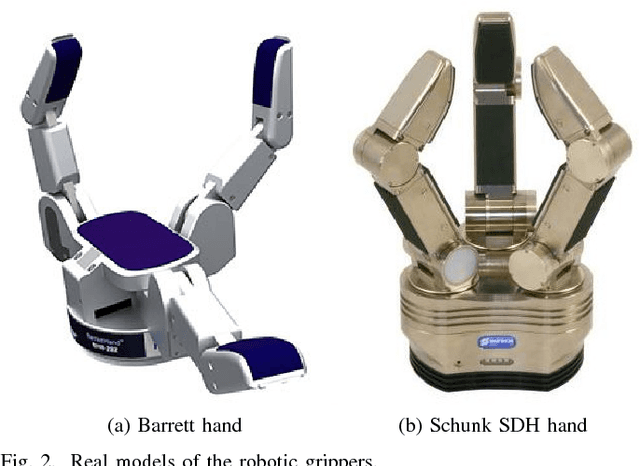
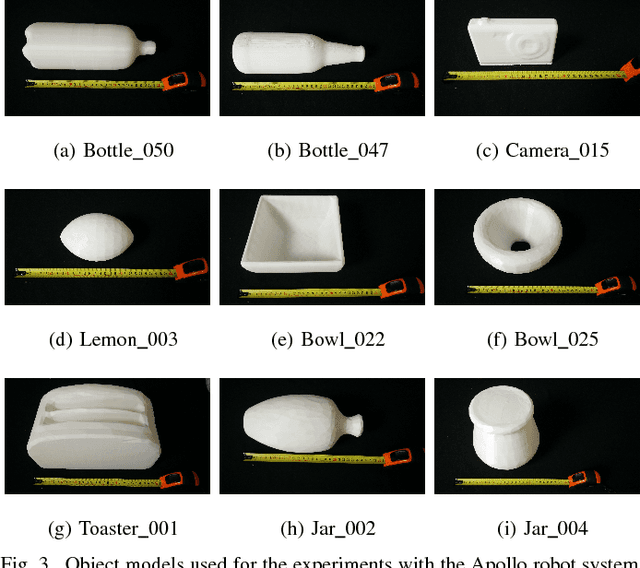

Current robotic manipulation requires reliable methods to predict whether a certain grasp on an object will be successful or not prior to its execution. Different methods and metrics have been developed for this purpose but there is still work to do to provide a robust solution. In this article we combine different metrics to evaluate real grasp executions. We use different machine learning algorithms to train a classifier able to predict the success of candidate grasps. Our experiments are performed with two different robotic grippers and different objects. Grasp candidates are evaluated in both simulation and real world. We consider 3 different categories to label grasp executions: robust, fragile and futile. Our results shows the proposed prediction model has success rate of 76\%.
Data-Driven Grasp Synthesis - A Survey
Apr 14, 2016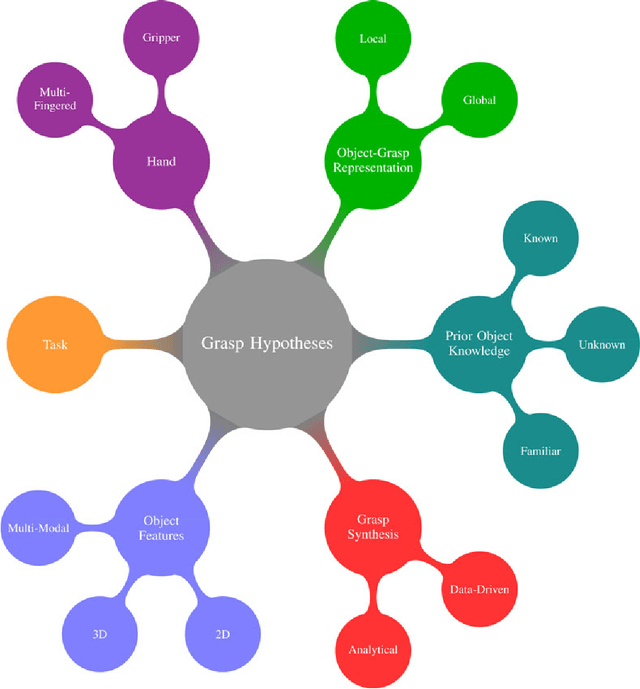

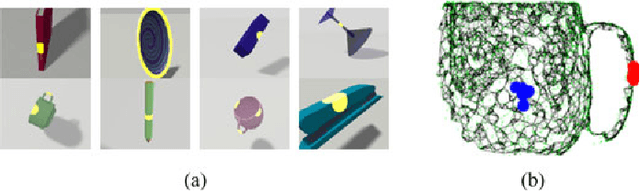
We review the work on data-driven grasp synthesis and the methodologies for sampling and ranking candidate grasps. We divide the approaches into three groups based on whether they synthesize grasps for known, familiar or unknown objects. This structure allows us to identify common object representations and perceptual processes that facilitate the employed data-driven grasp synthesis technique. In the case of known objects, we concentrate on the approaches that are based on object recognition and pose estimation. In the case of familiar objects, the techniques use some form of a similarity matching to a set of previously encountered objects. Finally for the approaches dealing with unknown objects, the core part is the extraction of specific features that are indicative of good grasps. Our survey provides an overview of the different methodologies and discusses open problems in the area of robot grasping. We also draw a parallel to the classical approaches that rely on analytic formulations.
* 20 pages, 30 Figures, submitted to IEEE Transactions on Robotics