 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning Approaches to Grasp Synthesis: A Review
Jul 06, 2022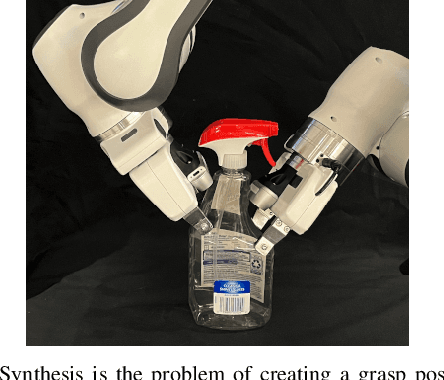
Grasping is the process of picking an object by applying forces and torques at a set of contacts. Recent advances in deep-learning methods have allowed rapid progress in robotic object grasping. We systematically surveyed the publications over the last decade, with a particular interest in grasping an object using all 6 degrees of freedom of the end-effector pose. Our review found four common methodologies for robotic grasping: sampling-based approaches, direct regression, reinforcement learning, and exemplar approaches. Furthermore, we found two 'supporting methods' around grasping that use deep-learning to support the grasping process, shape approximation, and affordances. We have distilled the publications found in this systematic review (85 papers) into ten key takeaways we consider crucial for future robotic grasping and manipulation research. An online version of the survey is available at https://rhys-newbury.github.io/projects/6dof/
Integrating High-Resolution Tactile Sensing into Grasp Stability Prediction
Jun 12, 2022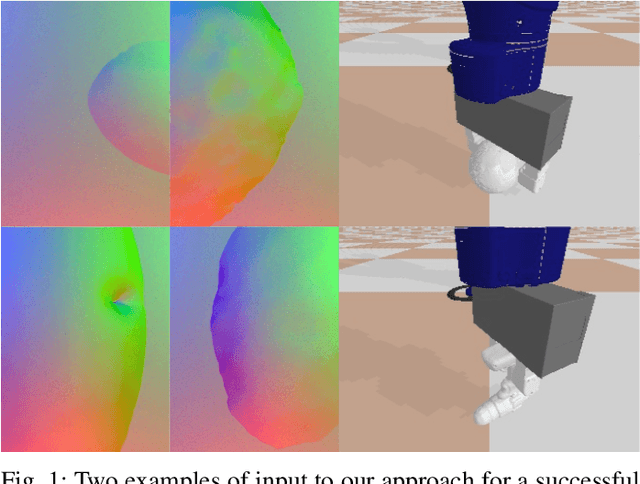
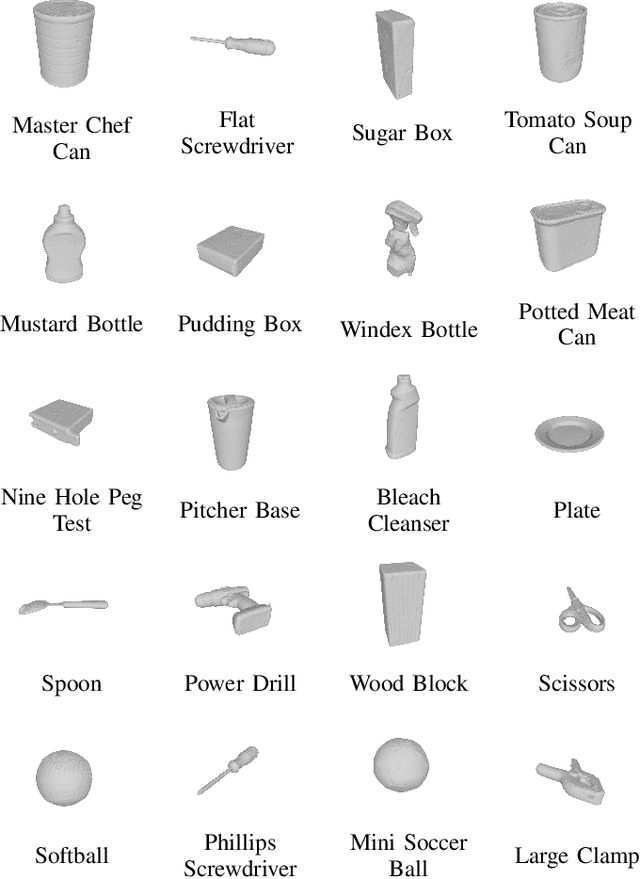
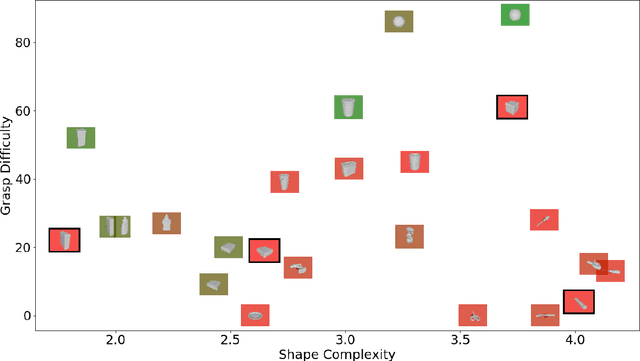
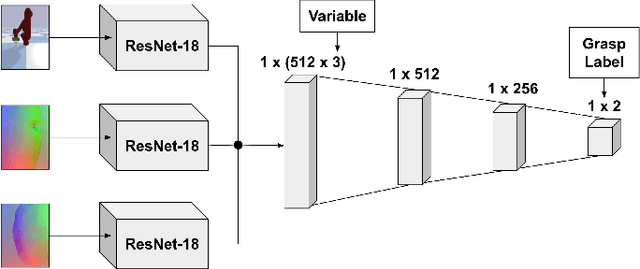
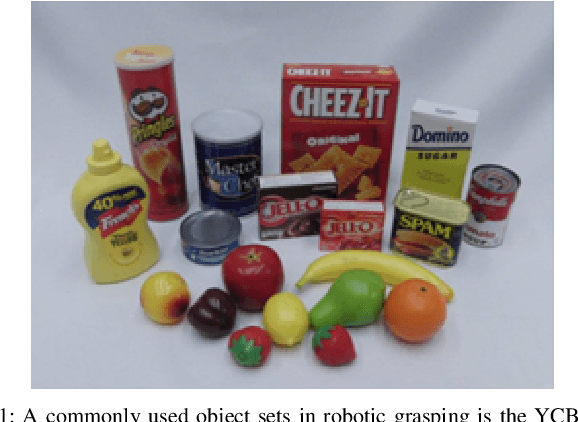
We investigate how high-resolution tactile sensors can be utilized in combination with vision and depth sensing, to improve grasp stability prediction. Recent advances in simulating high-resolution tactile sensing, in particular the TACTO simulator, enabled us to evaluate how neural networks can be trained with a combination of sensing modalities. With the large amounts of data needed to train large neural networks, robotic simulators provide a fast way to automate the data collection process. We expand on the existing work through an ablation study and an increased set of objects taken from the YCB benchmark set. Our results indicate that while the combination of vision, depth, and tactile sensing provides the best prediction results on known objects, the network fails to generalize to unknown objects. Our work also addresses existing issues with robotic grasping in tactile simulation and how to overcome them.