 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Grasp Synthesis - A Survey
Paper and Code
Apr 14, 2016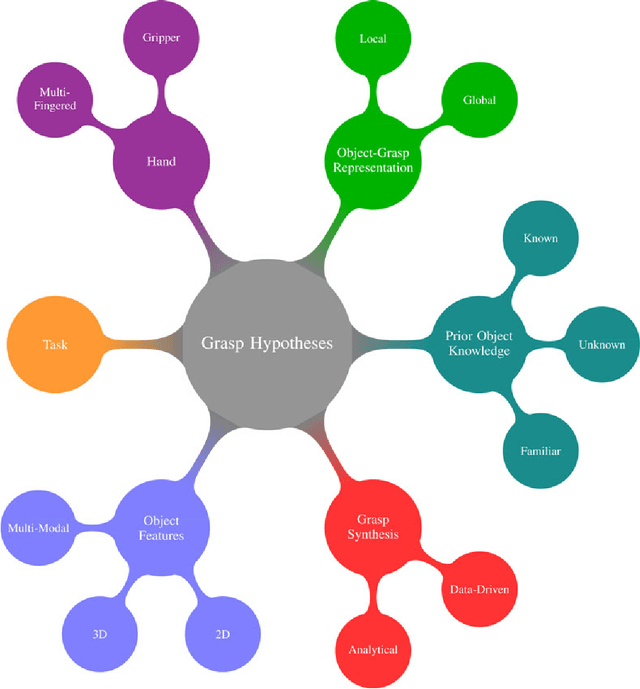

We review the work on data-driven grasp synthesis and the methodologies for sampling and ranking candidate grasps. We divide the approaches into three groups based on whether they synthesize grasps for known, familiar or unknown objects. This structure allows us to identify common object representations and perceptual processes that facilitate the employed data-driven grasp synthesis technique. In the case of known objects, we concentrate on the approaches that are based on object recognition and pose estimation. In the case of familiar objects, the techniques use some form of a similarity matching to a set of previously encountered objects. Finally for the approaches dealing with unknown objects, the core part is the extraction of specific features that are indicative of good grasps. Our survey provides an overview of the different methodologies and discusses open problems in the area of robot grasping. We also draw a parallel to the classical approaches that rely on analytic formulations.