 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Geometry of Representational Failures in Vision Language Models
Feb 02, 2026Vision-Language Models (VLMs) exhibit puzzling failures in multi-object visual tasks, such as hallucinating non-existent elements or failing to identify the most similar objects among distractions. While these errors mirror human cognitive constraints, such as the "Binding Problem", the internal mechanisms driving them in artificial systems remain poorly understood. Here, we propose a mechanistic insight by analyzing the representational geometry of open-weight VLMs (Qwen, InternVL, Gemma), comparing methodologies to distill "concept vectors" - latent directions encoding visual concepts. We validate our concept vectors via steering interventions that reliably manipulate model behavior in both simplified and naturalistic vision tasks (e.g., forcing the model to perceive a red flower as blue). We observe that the geometric overlap between these vectors strongly correlates with specific error patterns, offering a grounded quantitative framework to understand how internal representations shape model behavior and drive visual failures.
Size-adaptive Hypothesis Testing for Fairness
Jun 12, 2025



Determining whether an algorithmic decision-making system discriminates against a specific demographic typically involves comparing a single point estimate of a fairness metric against a predefined threshold. This practice is statistically brittle: it ignores sampling error and treats small demographic subgroups the same as large ones. The problem intensifies in intersectional analyses, where multiple sensitive attributes are considered jointly, giving rise to a larger number of smaller groups. As these groups become more granular, the data representing them becomes too sparse for reliable estimation, and fairness metrics yield excessively wide confidence intervals, precluding meaningful conclusions about potential unfair treatments. In this paper, we introduce a unified, size-adaptive, hypothesis-testing framework that turns fairness assessment into an evidence-based statistical decision. Our contribution is twofold. (i) For sufficiently large subgroups, we prove a Central-Limit result for the statistical parity difference, leading to analytic confidence intervals and a Wald test whose type-I (false positive) error is guaranteed at level $\alpha$. (ii) For the long tail of small intersectional groups, we derive a fully Bayesian Dirichlet-multinomial estimator; Monte-Carlo credible intervals are calibrated for any sample size and naturally converge to Wald intervals as more data becomes available. We validate our approach empirically on benchmark datasets, demonstrating how our tests provide interpretable, statistically rigorous decisions under varying degrees of data availability and intersectionality.
Learning Individual Behavior in Agent-Based Models with Graph Diffusion Networks
May 27, 2025
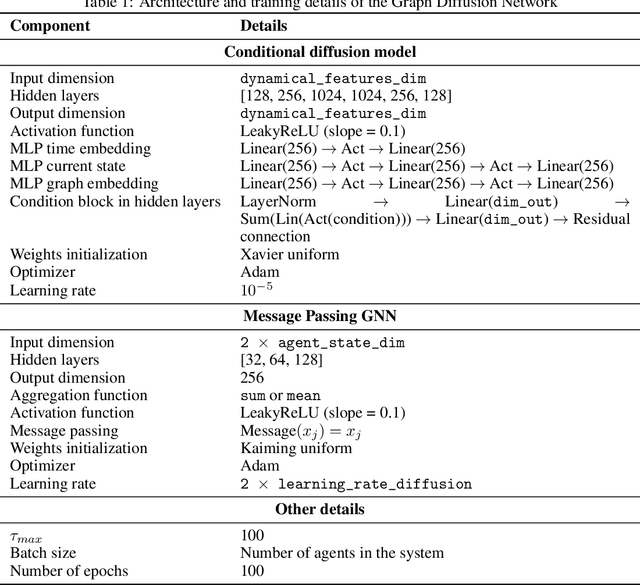

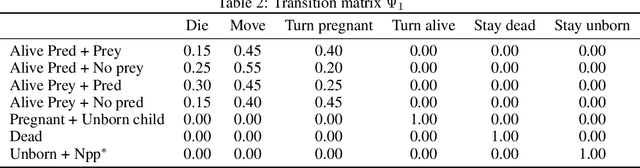
Agent-Based Models (ABMs) are powerful tools for studying emergent properties in complex systems. In ABMs, agent behaviors are governed by local interactions and stochastic rules. However, these rules are, in general, non-differentiable, limiting the use of gradient-based methods for optimization, and thus integration with real-world data. We propose a novel framework to learn a differentiable surrogate of any ABM by observing its generated data. Our method combines diffusion models to capture behavioral stochasticity and graph neural networks to model agent interactions. Distinct from prior surrogate approaches, our method introduces a fundamental shift: rather than approximating system-level outputs, it models individual agent behavior directly, preserving the decentralized, bottom-up dynamics that define ABMs. We validate our approach on two ABMs (Schelling's segregation model and a Predator-Prey ecosystem) showing that it replicates individual-level patterns and accurately forecasts emergent dynamics beyond training. Our results demonstrate the potential of combining diffusion models and graph learning for data-driven ABM simulation.
Multi-Class and Multi-Task Strategies for Neural Directed Link Prediction
Dec 14, 2024Link Prediction is a foundational task in Graph Representation Learning, supporting applications like link recommendation, knowledge graph completion and graph generation. Graph Neural Networks have shown the most promising results in this domain and are currently the de facto standard approach to learning from graph data. However, a key distinction exists between Undirected and Directed Link Prediction: the former just predicts the existence of an edge, while the latter must also account for edge directionality and bidirectionality. This translates to Directed Link Prediction (DLP) having three sub-tasks, each defined by how training, validation and test sets are structured. Most research on DLP overlooks this trichotomy, focusing solely on the "existence" sub-task, where training and test sets are random, uncorrelated samples of positive and negative directed edges. Even in the works that recognize the aforementioned trichotomy, models fail to perform well across all three sub-tasks. In this study, we experimentally demonstrate that training Neural DLP (NDLP) models only on the existence sub-task, using methods adapted from Neural Undirected Link Prediction, results in parameter configurations that fail to capture directionality and bidirectionality, even after rebalancing edge classes. To address this, we propose three strategies that handle the three tasks simultaneously. Our first strategy, the Multi-Class Framework for Neural Directed Link Prediction (MC-NDLP) maps NDLP to a Multi-Class training objective. The second and third approaches adopt a Multi-Task perspective, either with a Multi-Objective (MO-DLP) or a Scalarized (S-DLP) strategy. Our results show that these methods outperform traditional approaches across multiple datasets and models, achieving equivalent or superior performance in addressing the three DLP sub-tasks.
Disentangled and Self-Explainable Node Representation Learning
Oct 28, 2024



Node representations, or embeddings, are low-dimensional vectors that capture node properties, typically learned through unsupervised structural similarity objectives or supervised tasks. While recent efforts have focused on explaining graph model decisions, the interpretability of unsupervised node embeddings remains underexplored. To bridge this gap, we introduce DiSeNE (Disentangled and Self-Explainable Node Embedding), a framework that generates self-explainable embeddings in an unsupervised manner. Our method employs disentangled representation learning to produce dimension-wise interpretable embeddings, where each dimension is aligned with distinct topological structure of the graph. We formalize novel desiderata for disentangled and interpretable embeddings, which drive our new objective functions, optimizing simultaneously for both interpretability and disentanglement. Additionally, we propose several new metrics to evaluate representation quality and human interpretability. Extensive experiments across multiple benchmark datasets demonstrate the effectiveness of our approach.
HOLMES: HOLonym-MEronym based Semantic inspection for Convolutional Image Classifiers
Mar 13, 2024Convolutional Neural Networks (CNNs) are nowadays the model of choice in Computer Vision, thanks to their ability to automatize the feature extraction process in visual tasks. However, the knowledge acquired during training is fully subsymbolic, and hence difficult to understand and explain to end users. In this paper, we propose a new technique called HOLMES (HOLonym-MEronym based Semantic inspection) that decomposes a label into a set of related concepts, and provides component-level explanations for an image classification model. Specifically, HOLMES leverages ontologies, web scraping and transfer learning to automatically construct meronym (parts)-based detectors for a given holonym (class). Then, it produces heatmaps at the meronym level and finally, by probing the holonym CNN with occluded images, it highlights the importance of each part on the classification output. Compared to state-of-the-art saliency methods, HOLMES takes a step further and provides information about both where and what the holonym CNN is looking at, without relying on densely annotated datasets and without forcing concepts to be associated to single computational units. Extensive experimental evaluation on different categories of objects (animals, tools and vehicles) shows the feasibility of our approach. On average, HOLMES explanations include at least two meronyms, and the ablation of a single meronym roughly halves the holonym model confidence. The resulting heatmaps were quantitatively evaluated using the deletion/insertion/preservation curves. All metrics were comparable to those achieved by GradCAM, while offering the advantage of further decomposing the heatmap in human-understandable concepts, thus highlighting both the relevance of meronyms to object classification, as well as HOLMES ability to capture it. The code is available at https://github.com/FrancesC0de/HOLMES.
* This work has been accepted to be presented to The 1st World Conference on eXplainable Artificial Intelligence (xAI 2023), July 26-28, 2023 - Lisboa, Portugal
DINE: Dimensional Interpretability of Node Embeddings
Oct 02, 2023

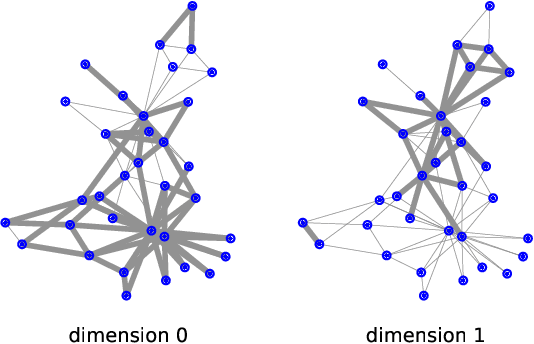

Graphs are ubiquitous due to their flexibility in representing social and technological systems as networks of interacting elements. Graph representation learning methods, such as node embeddings, are powerful approaches to map nodes into a latent vector space, allowing their use for various graph tasks. Despite their success, only few studies have focused on explaining node embeddings locally. Moreover, global explanations of node embeddings remain unexplored, limiting interpretability and debugging potentials. We address this gap by developing human-understandable explanations for dimensions in node embeddings. Towards that, we first develop new metrics that measure the global interpretability of embedding vectors based on the marginal contribution of the embedding dimensions to predicting graph structure. We say that an embedding dimension is more interpretable if it can faithfully map to an understandable sub-structure in the input graph - like community structure. Having observed that standard node embeddings have low interpretability, we then introduce DINE (Dimension-based Interpretable Node Embedding), a novel approach that can retrofit existing node embeddings by making them more interpretable without sacrificing their task performance. We conduct extensive experiments on synthetic and real-world graphs and show that we can simultaneously learn highly interpretable node embeddings with effective performance in link prediction.
Evaluating Link Prediction Explanations for Graph Neural Networks
Aug 03, 2023Graph Machine Learning (GML) has numerous applications, such as node/graph classification and link prediction, in real-world domains. Providing human-understandable explanations for GML models is a challenging yet fundamental task to foster their adoption, but validating explanations for link prediction models has received little attention. In this paper, we provide quantitative metrics to assess the quality of link prediction explanations, with or without ground-truth. State-of-the-art explainability methods for Graph Neural Networks are evaluated using these metrics. We discuss how underlying assumptions and technical details specific to the link prediction task, such as the choice of distance between node embeddings, can influence the quality of the explanations.
Beyond One-Hot-Encoding: Injecting Semantics to Drive Image Classifiers
Aug 01, 2023



Images are loaded with semantic information that pertains to real-world ontologies: dog breeds share mammalian similarities, food pictures are often depicted in domestic environments, and so on. However, when training machine learning models for image classification, the relative similarities amongst object classes are commonly paired with one-hot-encoded labels. According to this logic, if an image is labelled as 'spoon', then 'tea-spoon' and 'shark' are equally wrong in terms of training loss. To overcome this limitation, we explore the integration of additional goals that reflect ontological and semantic knowledge, improving model interpretability and trustworthiness. We suggest a generic approach that allows to derive an additional loss term starting from any kind of semantic information about the classification label. First, we show how to apply our approach to ontologies and word embeddings, and discuss how the resulting information can drive a supervised learning process. Second, we use our semantically enriched loss to train image classifiers, and analyse the trade-offs between accuracy, mistake severity, and learned internal representations. Finally, we discuss how this approach can be further exploited in terms of explainability and adversarial robustness. Code repository: https://github.com/S1M0N38/semantic-encodings
Fast and Effective GNN Training with Linearized Random Spanning Trees
Jun 09, 2023


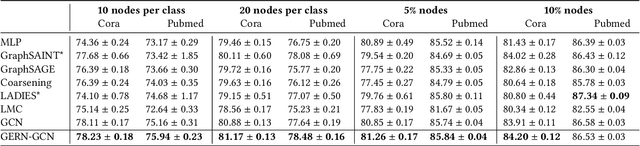
We present a new effective and scalable framework for training GNNs in supervised node classification tasks, given graph-structured data. Our approach increasingly refines the weight update operations on a sequence of path graphs obtained by linearizing random spanning trees extracted from the input network. The path graphs are designed to retain essential topological and node information of the original graph. At the same time, the sparsity of path graphs enables a much lighter GNN training which, besides scalability, helps in mitigating classical training issues, like over-squashing and over-smoothing. We carry out an extensive experimental investigation on a number of real-world graph benchmarks, where we apply our framework to graph convolutional networks, showing simultaneous improvement of both training speed and test accuracy, as compared to well-known baselines.