 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoice-Driven Semantic Perception for UAV-Assisted Emergency Networks
Feb 19, 2026Unmanned Aerial Vehicle (UAV)-assisted networks are increasingly foreseen as a promising approach for emergency response, providing rapid, flexible, and resilient communications in environments where terrestrial infrastructure is degraded or unavailable. In such scenarios, voice radio communications remain essential for first responders due to their robustness; however, their unstructured nature prevents direct integration with automated UAV-assisted network management. This paper proposes SIREN, an AI-driven framework that enables voice-driven perception for UAV-assisted networks. By integrating Automatic Speech Recognition (ASR) with Large Language Model (LLM)-based semantic extraction and Natural Language Processing (NLP) validation, SIREN converts emergency voice traffic into structured, machine-readable information, including responding units, location references, emergency severity, and Quality-of-Service (QoS) requirements. SIREN is evaluated using synthetic emergency scenarios with controlled variations in language, speaker count, background noise, and message complexity. The results demonstrate robust transcription and reliable semantic extraction across diverse operating conditions, while highlighting speaker diarization and geographic ambiguity as the main limiting factors. These findings establish the feasibility of voice-driven situational awareness for UAV-assisted networks and show a practical foundation for human-in-the-loop decision support and adaptive network management in emergency response operations.
CONVERGE: A Multi-Agent Vision-Radio Architecture for xApps
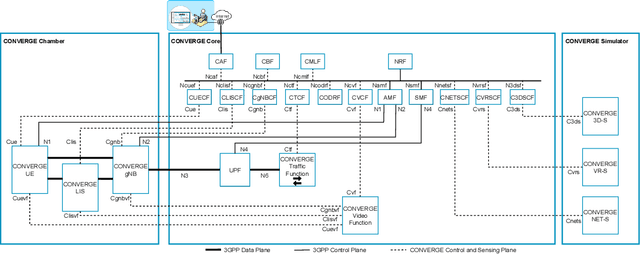
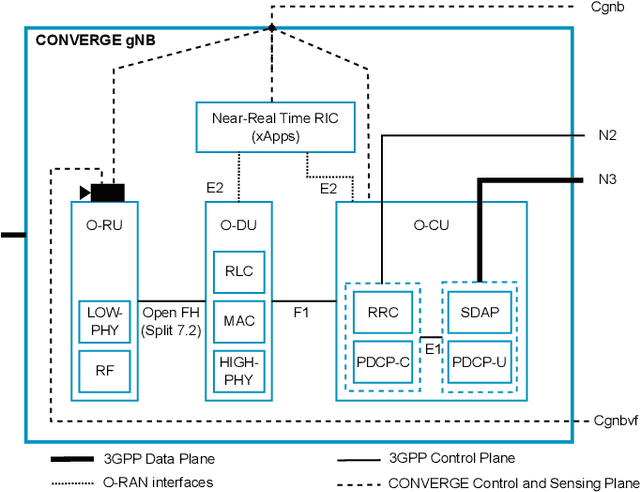
Aug 06, 2025Telecommunications and computer vision have evolved independently. With the emergence of high-frequency wireless links operating mostly in line-of-sight, visual data can help predict the channel dynamics by detecting obstacles and help overcoming them through beamforming or handover techniques. This paper proposes a novel architecture for delivering real-time radio and video sensing information to O-RAN xApps through a multi-agent approach, and introduces a new video function capable of generating blockage information for xApps, enabling Integrated Sensing and Communications. Experimental results show that the delay of sensing information remains under 1\,ms and that an xApp can successfully use radio and video sensing information to control the 5G/6G RAN in real-time.
A Framework Leveraging Large Language Models for Autonomous UAV Control in Flying Networks
Jun 04, 2025

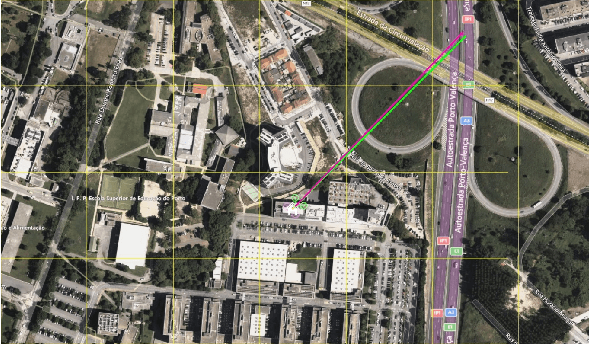
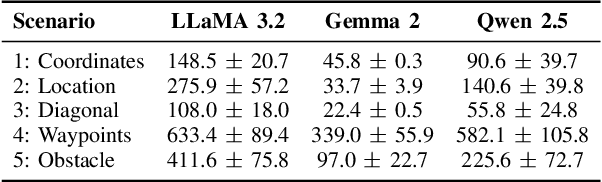
This paper proposes FLUC, a modular framework that integrates open-source Large Language Models (LLMs) with Unmanned Aerial Vehicle (UAV) autopilot systems to enable autonomous control in Flying Networks (FNs). FLUC translates high-level natural language commands into executable UAV mission code, bridging the gap between operator intent and UAV behaviour. FLUC is evaluated using three open-source LLMs - Qwen 2.5, Gemma 2, and LLaMA 3.2 - across scenarios involving code generation and mission planning. Results show that Qwen 2.5 excels in multi-step reasoning, Gemma 2 balances accuracy and latency, and LLaMA 3.2 offers faster responses with lower logical coherence. A case study on energy-aware UAV positioning confirms FLUC's ability to interpret structured prompts and autonomously execute domain-specific logic, showing its effectiveness in real-time, mission-driven control.
On the Energy Consumption of Rotary Wing and Fixed Wing UAVs in Flying Networks
Jun 27, 2024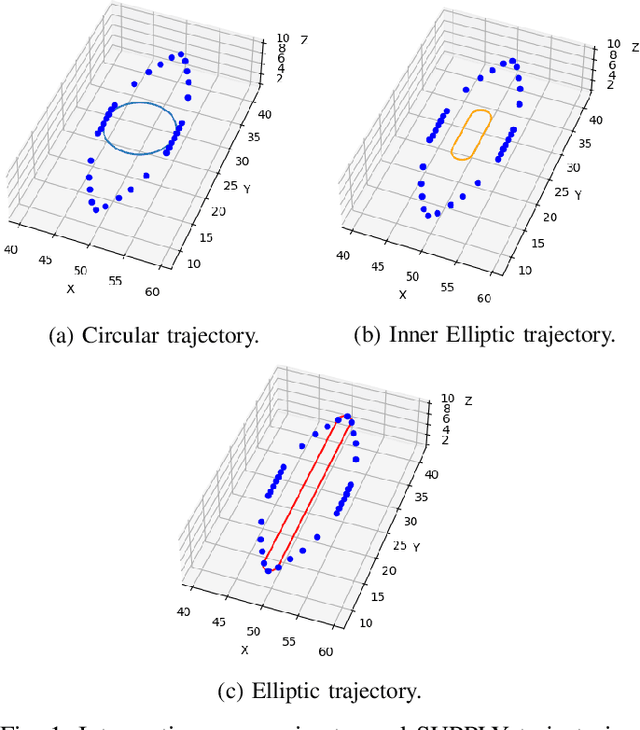
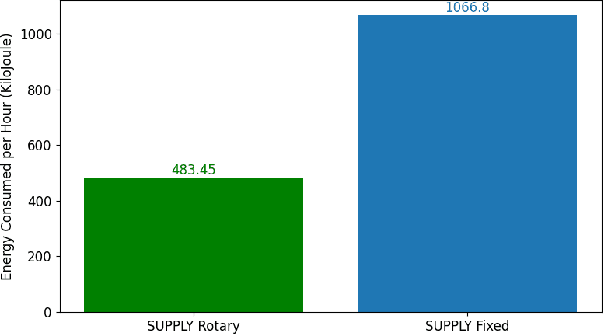
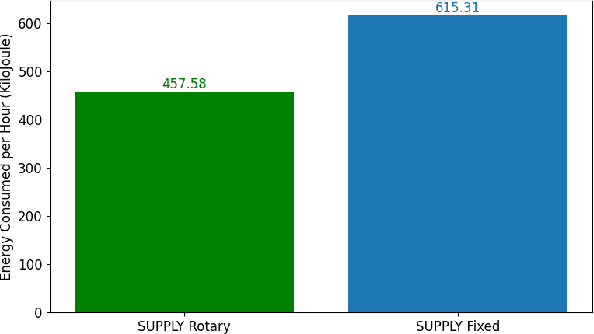
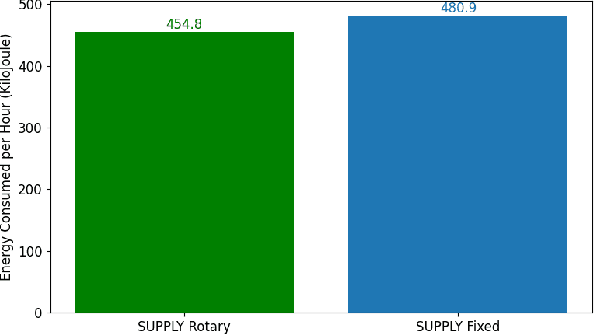
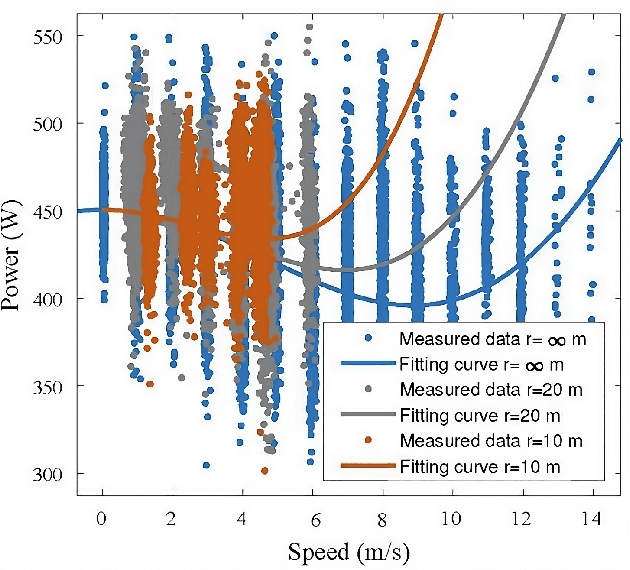
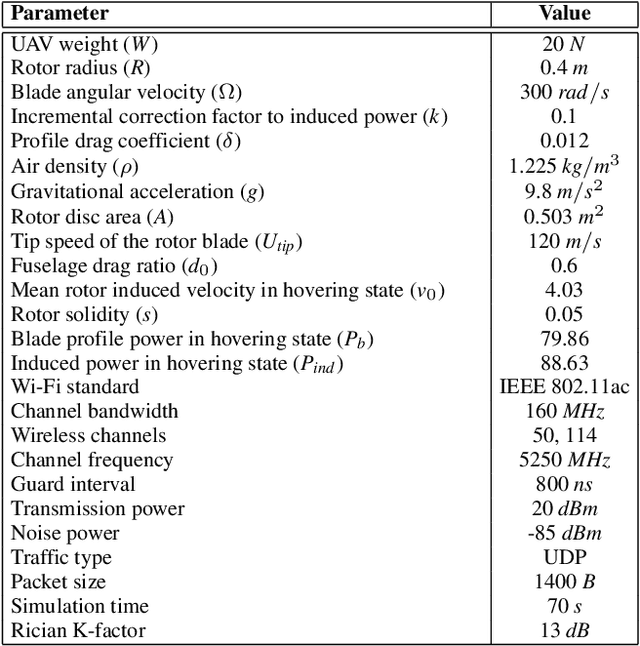
Unmanned Aerial Vehicles (UAVs) are increasingly used to enable wireless communications. Due to their characteristics, such as the ability to hover and carry cargo, UAVs can serve as communications nodes, including Wi-Fi Access Points and Cellular Base Stations. In previous work, we proposed the Sustainable multi-UAV Performance-aware Placement (SUPPLY) algorithm, which focuses on the energy-efficient placement of multiple UAVs acting as Flying Access Points (FAPs). Additionally, we developed the Multi-UAV Energy Consumption (MUAVE) simulator to evaluate the UAV energy consumption, specifically when using the SUPPLY algorithm. However, MUAVE was initially designed to compute the energy consumption for rotary-wing UAVs only. In this paper, we propose eMUAVE, an enhanced version of the MUAVE simulator that allows the evaluation of the energy consumption for both rotary-wing and fixed-wing UAVs. Our energy consumption evaluation using eMUAVE considers reference and random networking scenarios. The results show that fixed-wing UAVs can be employed in the majority of networking scenarios. However, rotary-wing UAVs are typically more energy-efficient than fixed-wing UAVs when following the trajectories defined by SUPPLY.
TS40K: a 3D Point Cloud Dataset of Rural Terrain and Electrical Transmission System
May 22, 2024



Research on supervised learning algorithms in 3D scene understanding has risen in prominence and witness great increases in performance across several datasets. The leading force of this research is the problem of autonomous driving followed by indoor scene segmentation. However, openly available 3D data on these tasks mainly focuses on urban scenarios. In this paper, we propose TS40K, a 3D point cloud dataset that encompasses more than 40,000 Km on electrical transmission systems situated in European rural terrain. This is not only a novel problem for the research community that can aid in the high-risk mission of power-grid inspection, but it also offers 3D point clouds with distinct characteristics from those in self-driving and indoor 3D data, such as high point-density and no occlusion. In our dataset, each 3D point is labeled with 1 out of 22 annotated classes. We evaluate the performance of state-of-the-art methods on our dataset concerning 3D semantic segmentation and 3D object detection. Finally, we provide a comprehensive analysis of the results along with key challenges such as using labels that were not originally intended for learning tasks.
SUPPLY: Sustainable multi-UAV Performance-aware Placement Algorithm for Flying Networks
Apr 09, 2024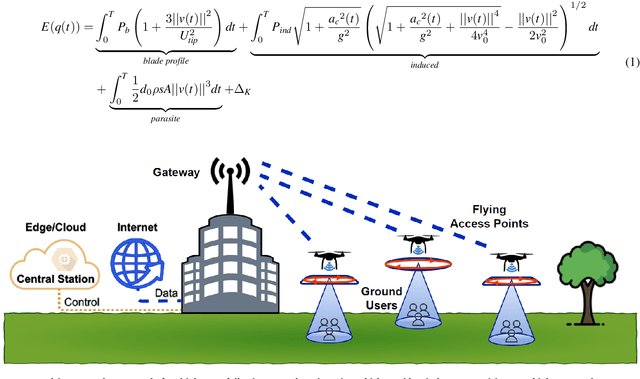
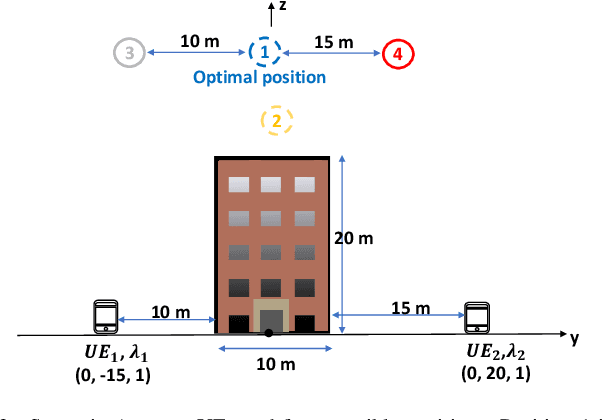
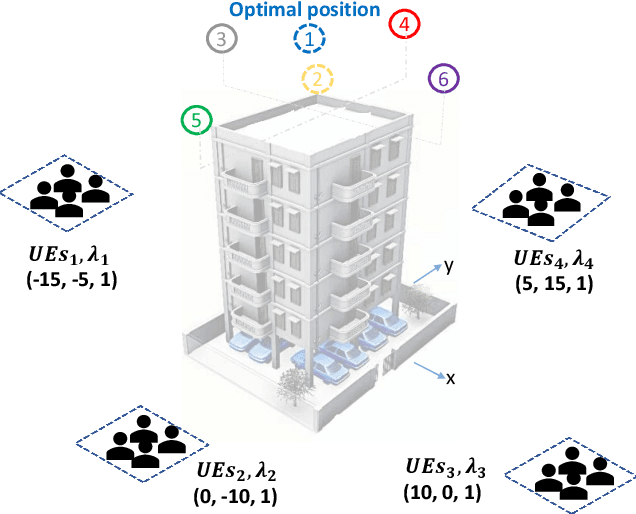
Unmanned Aerial Vehicles (UAVs) are used for a wide range of applications. Due to characteristics such as the ability to hover and carry cargo on-board, rotary-wing UAVs have been considered suitable platforms for carrying communications nodes, including Wi-Fi Access Points and cellular Base Stations. This gave rise to the concept of Flying Networks (FNs), now making part of the so-called Non-Terrestrial Networks (NTNs) defined in 3GPP. In scenarios where the deployment of terrestrial networks is not feasible, the use of FNs has emerged as a solution to provide wireless connectivity. However, the management of the communications resources in FNs imposes significant challenges, especially regarding the positioning of the UAVs so that the Quality of Service (QoS) offered to the Ground Users (GUs) and devices is maximized. Moreover, unlike terrestrial networks that are directly connected to the power grid, UAVs typically rely on on-board batteries that need to be recharged. In order to maximize the UAVs' flying time, the energy consumed by the UAVs needs to be minimized. When it comes to multi-UAV placement, most state-of-the-art solutions focus on maximizing the coverage area and assume that the UAVs keep hovering in a fixed position while serving GUs. Also, they do not address the energy-aware multi-UAV placement problem in networking scenarios where the GUs may have different QoS requirements and may not be uniformly distributed across the area of interest. In this work, we propose the Sustainable multi-UAV Performance-aware Placement (SUPPLY) algorithm. SUPPLY defines the energy and performance-aware positioning of multiple UAVs in an FN. To accomplish this, SUPPLY defines trajectories that minimize UAVs' energy consumption, while ensuring the targeted QoS levels. The obtained results show up to 25% energy consumption reduction with minimal impact on throughput and delay.
Vision-Radio Experimental Infrastructure Architecture Towards 6G
Feb 29, 2024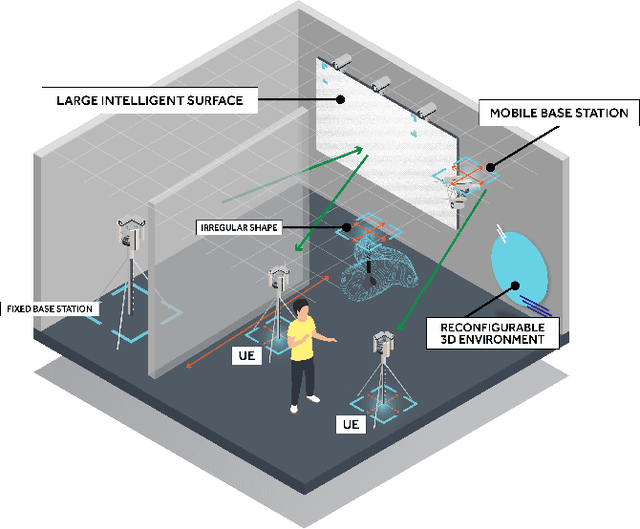
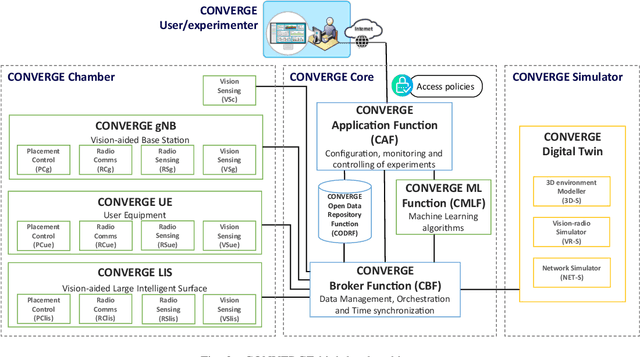
Telecommunications and computer vision have evolved separately so far. Yet, with the shift to sub-terahertz (sub-THz) and terahertz (THz) radio communications, there is an opportunity to explore computer vision technologies together with radio communications, considering the dependency of both technologies on Line of Sight. The combination of radio sensing and computer vision can address challenges such as obstructions and poor lighting. Also, machine learning algorithms, capable of processing multimodal data, play a crucial role in deriving insights from raw and low-level sensing data, offering a new level of abstraction that can enhance various applications and use cases such as beamforming and terminal handovers. This paper introduces CONVERGE, a pioneering vision-radio paradigm that bridges this gap by leveraging Integrated Sensing and Communication (ISAC) to facilitate a dual "View-to-Communicate, Communicate-to-View" approach. CONVERGE offers tools that merge wireless communications and computer vision, establishing a novel Research Infrastructure (RI) that will be open to the scientific community and capable of providing open datasets. This new infrastructure will support future research in 6G and beyond concerning multiple verticals, such as telecommunications, automotive, manufacturing, media, and health.
Joint Traffic and Obstacle-aware UAV Positioning Algorithm for Aerial Networks
Jul 31, 2023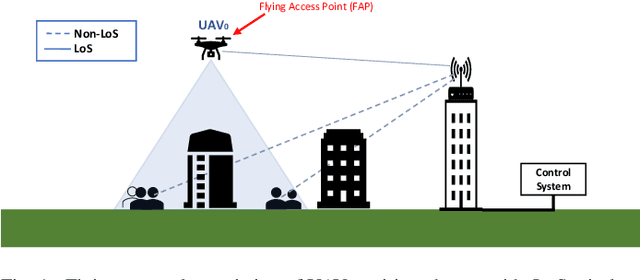
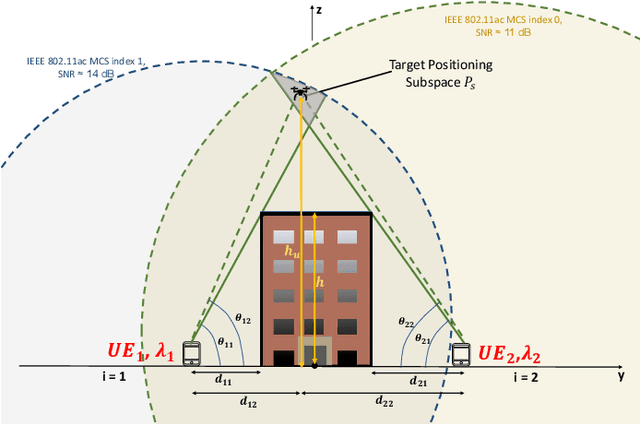
Unmanned Aerial Vehicles (UAVs) are increasingly used as cost-effective and flexible Wi-Fi Access Points (APs) and cellular Base Stations (BSs) to enhance Quality of Service (QoS). In disaster management scenarios, UAV-based networks provide on-demand wireless connectivity when traditional infrastructures fail. In obstacle-rich environments like urban areas, reliable high-capacity communications links depend on Line-of-Sight (LoS) availability, especially at higher frequencies. Positioning UAVs to consider obstacles and enable LoS communications represents a promising solution that requires further exploration and development. The main contribution of this paper is the Traffic- and Obstacle-aware UAV Positioning Algorithm (TOPA). TOPA takes into account the users' traffic demand and the need for LoS between the UAV and the ground users in the presence of obstacles. The network performance achieved when using TOPA was evaluated through ns-3 simulations. The results show up to 100% improvement in the aggregate throughput without compromising fairness.
UAV-Assisted Wireless Communications: An Experimental Analysis of Air-to-Ground and Ground-to-Air Channels in Open Environments
Mar 29, 2023

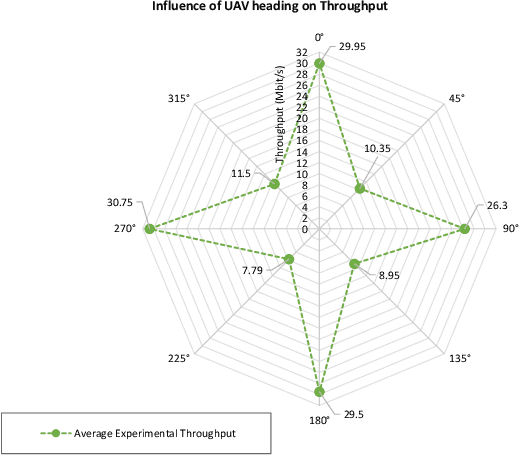
Unmanned Aerial Vehicles (UAVs) offer promising potential as communications node carriers, providing on-demand wireless connectivity to users. While existing literature presents various channel models, they often overlook the impact of UAV heading. This paper experimentally characterizes Air-to-Ground (A2G) and Ground-to-Air (G2A) wireless channels in obstacle-free, interference-free open environments, accounting for distance and UAV heading. We analyze the Received Signal Strength Indicator (RSSI) and TCP throughput between ground users and UAVs, covering distances between 50 m and 500 m, and considering different UAV headings. Our study offers a more accurate channel model characterization compared to deterministic models such as Friis and two-ray. Additionally, we characterize the antenna's radiation pattern based on UAV headings.