 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Activity Recognition with a 6.5 GHz Reconfigurable Intelligent Surface for Wi-Fi 6E
Jan 24, 2025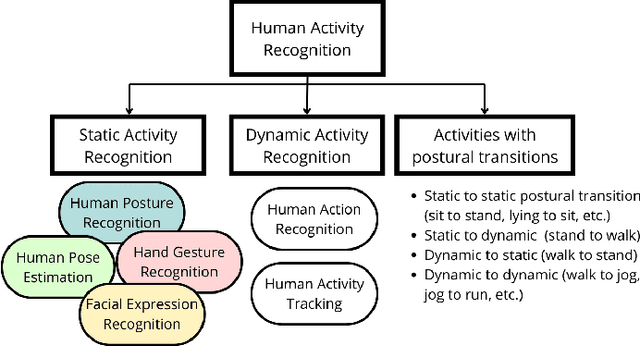
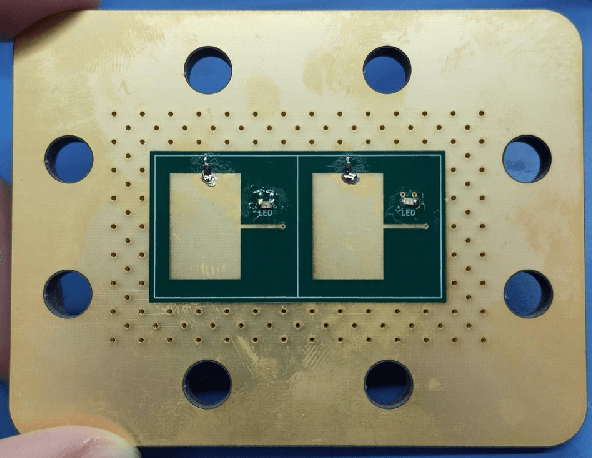
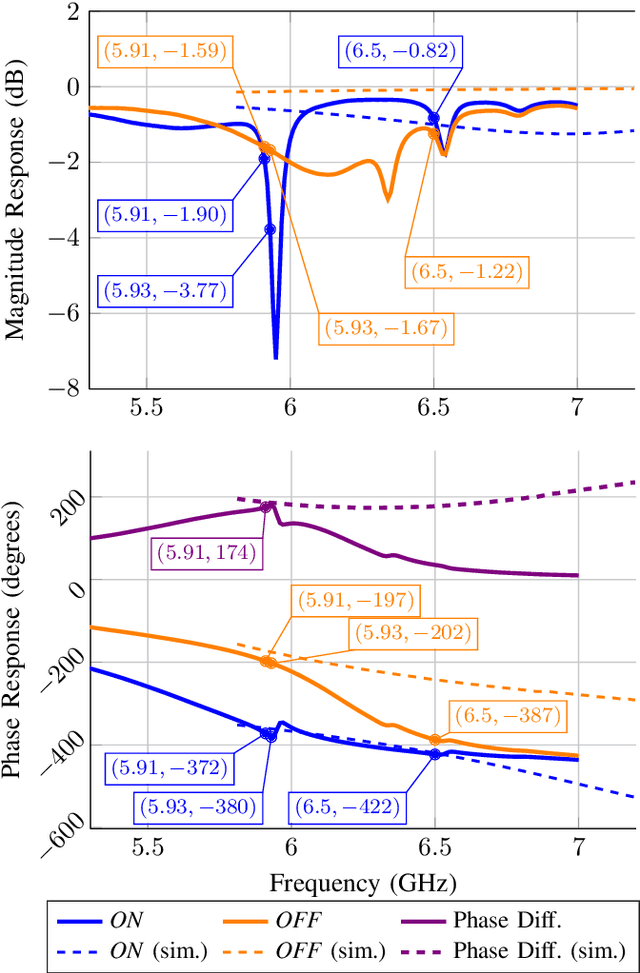
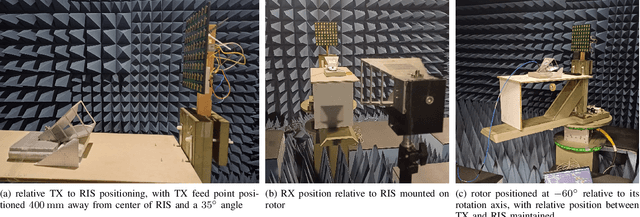
Human Activity Recognition (HAR) is the identification and classification of static and dynamic human activities, which find applicability in domains like healthcare, entertainment, security, and cyber-physical systems. Traditional HAR approaches rely on wearable sensors, vision-based systems, or ambient sensing, each with inherent limitations such as privacy concerns or restricted sensing conditions. Recently, Radio Frequency (RF)-based HAR has emerged, relying on the interaction of RF signals with people to infer activities. Reconfigurable Intelligent Surfaces (RISs) offers significant potential in this domain by enabling dynamic control over the wireless environment, thus enhancing the information extracted from RF signals. We present an Hand Gesture Recognition (HGR) approach that employs our own 6.5 GHz RIS design to manipulate the RF medium in an area of interest. We validate the capability of our RIS to control the medium by characterizing its steering response, and further we gather and publish a dataset for HGR classification for three different hand gestures. By employing two Convolutional Neural Networks (CNNs) models trained on data gathered under random and optimized RIS configuration sequences, we achieved classification accuracies exceeding 90%.
Enhancing NLoS RIS-Aided Localization with Optimization and Machine Learning
May 03, 2024This paper introduces two machine learning optimization algorithms to significantly enhance position estimation in Reconfigurable Intelligent Surface (RIS) aided localization for mobile user equipment in Non-Line-of-Sight conditions. Leveraging the strengths of these algorithms, we present two methods capable of achieving extremely high accuracy, reaching sub-centimeter or even sub-millimeter levels at 3.5 GHz. The simulation results highlight the potential of these approaches, showing significant improvements in indoor mobile localization. The demonstrated precision and reliability of the proposed methods offer new opportunities for practical applications in real-world scenarios, particularly in Non-Line-of-Sight indoor localization. By evaluating four optimization techniques, we determine that a combination of a Genetic Algorithm (GA) and Particle Swarm Optimization (PSO) results in localization errors under 30 cm in 90 % of the cases, and under 5 mm for close to 85 % of cases when considering a simulated room of 10 m by 10 m where two of the walls are equipped with RIS tiles.
A Deep Learning Approach in RIS-based Indoor Localization
May 03, 2024In the domain of RIS-based indoor localization, our work introduces two distinct approaches to address real-world challenges. The first method is based on deep learning, employing a Long Short-Term Memory (LSTM) network. The second, a novel LSTM-PSO hybrid, strategically takes advantage of deep learning and optimization techniques. Our simulations encompass practical scenarios, including variations in RIS placement and the intricate dynamics of multipath effects, all in Non-Line-of-Sight conditions. Our methods can achieve very high reliability, obtaining centimeter-level accuracy for the 98th percentile (worst case) in a different set of conditions, including the presence of the multipath effect. Furthermore, our hybrid approach showcases remarkable resolution, achieving sub-millimeter-level accuracy in numerous scenarios.
Vision-Radio Experimental Infrastructure Architecture Towards 6G
Feb 29, 2024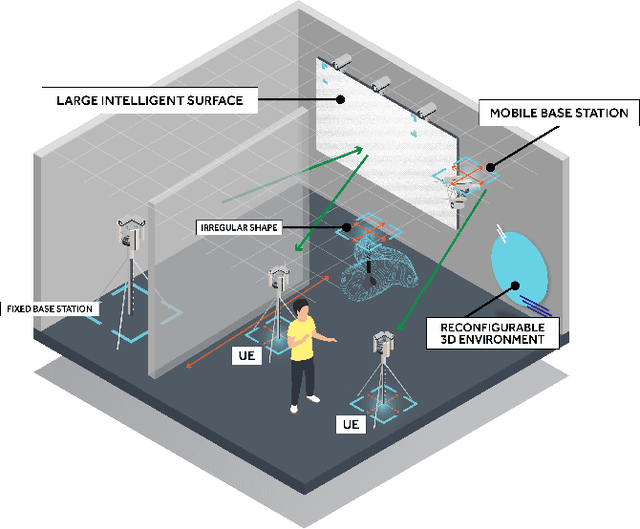
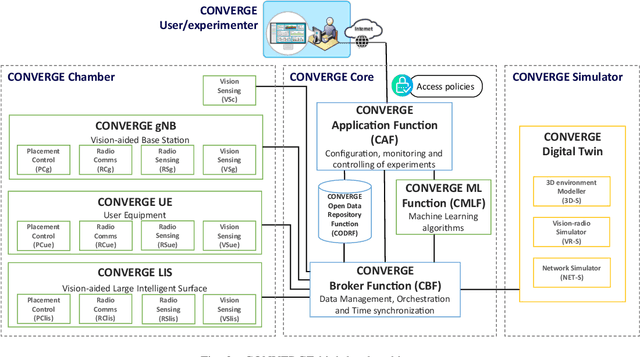
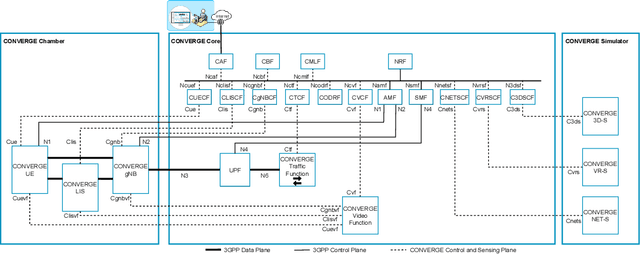
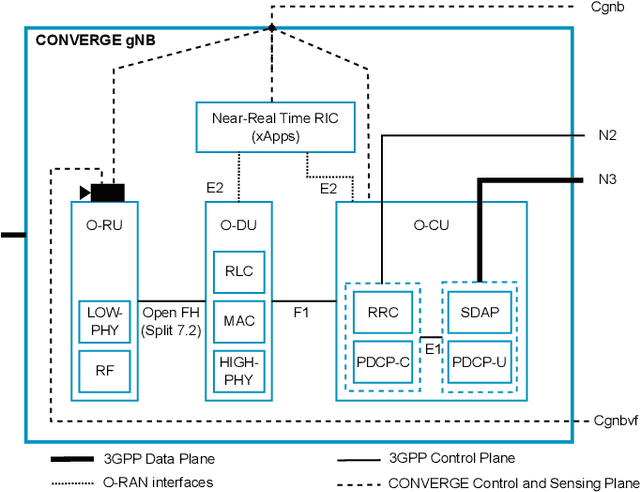
Telecommunications and computer vision have evolved separately so far. Yet, with the shift to sub-terahertz (sub-THz) and terahertz (THz) radio communications, there is an opportunity to explore computer vision technologies together with radio communications, considering the dependency of both technologies on Line of Sight. The combination of radio sensing and computer vision can address challenges such as obstructions and poor lighting. Also, machine learning algorithms, capable of processing multimodal data, play a crucial role in deriving insights from raw and low-level sensing data, offering a new level of abstraction that can enhance various applications and use cases such as beamforming and terminal handovers. This paper introduces CONVERGE, a pioneering vision-radio paradigm that bridges this gap by leveraging Integrated Sensing and Communication (ISAC) to facilitate a dual "View-to-Communicate, Communicate-to-View" approach. CONVERGE offers tools that merge wireless communications and computer vision, establishing a novel Research Infrastructure (RI) that will be open to the scientific community and capable of providing open datasets. This new infrastructure will support future research in 6G and beyond concerning multiple verticals, such as telecommunications, automotive, manufacturing, media, and health.
Design and Experimental Evaluation of a Bluetooth 5.1 Antenna Array for Angle-of-Arrival Estimation
Apr 26, 2022



On the of the applications in the realm of the Internet-of-Things (IoT) is real-time localization of assets in specific application environments where satellite based global positioning is unviable. Numerous approaches for localization relying on wireless sensor mesh systems have been evaluated, but the recent Bluetooth Low Energy (BLE) 5.1 direction finding features based on Angle-of-Arrival (AoA) promise a low-cost solution for this application. In this paper, we present an implementation of a BLE 5.1 based circular antenna array, and perform two experimental evaluations over the quality of the retrieved data sampled from the array: in an anechoic chamber, and in a real-world environment using a setup composed of four BLE beacons.
A Flexible HLS Hoeffding Tree Implementation for Runtime Learning on FPGA
Dec 03, 2021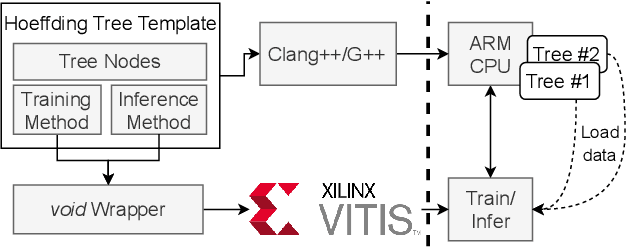
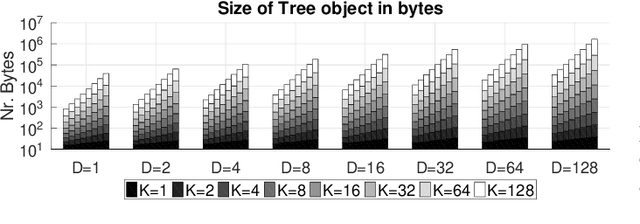
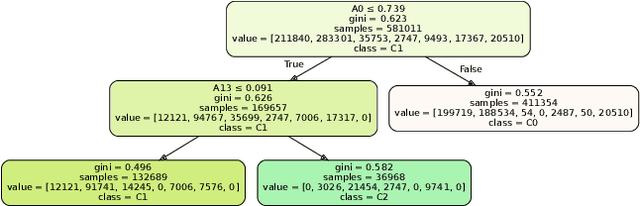
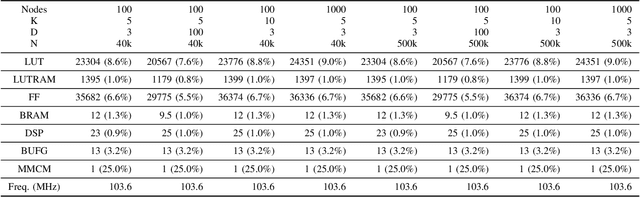
Decision trees are often preferred when implementing Machine Learning in embedded systems for their simplicity and scalability. Hoeffding Trees are a type of Decision Trees that take advantage of the Hoeffding Bound to allow them to learn patterns in data without having to continuously store the data samples for future reprocessing. This makes them especially suitable for deployment on embedded devices. In this work we highlight the features of an HLS implementation of the Hoeffding Tree. The implementation parameters include the feature size of the samples (D), the number of output classes (K), and the maximum number of nodes to which the tree is allowed to grow (Nd). We target a Xilinx MPSoC ZCU102, and evaluate: the design's resource requirements and clock frequency for different numbers of classes and feature size, the execution time on several synthetic datasets of varying sample sizes (N), number of output classes and the execution time and accuracy for two datasets from UCI. For a problem size of D3, K5, and N40000, a single decision tree operating at 103MHz is capable of 8.3x faster inference than the 1.2GHz ARM Cortex-A53 core. Compared to a reference implementation of the Hoeffding tree, we achieve comparable classification accuracy for the UCI datasets.
Multiple target tracking with interaction using an MCMC MRF Particle Filter
Nov 25, 2021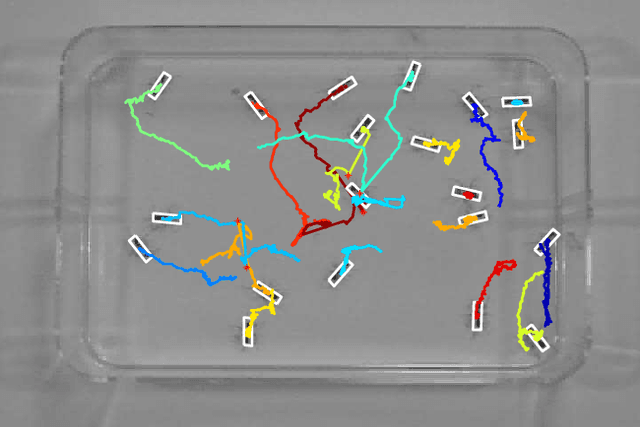
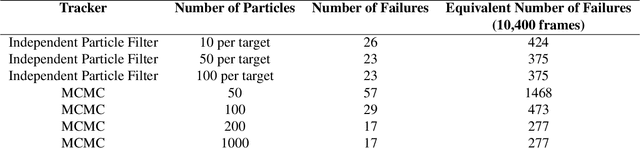

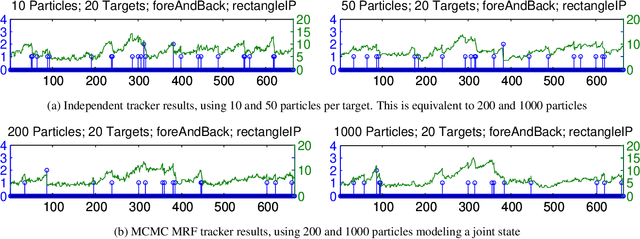
This paper presents and discusses an implementation of a multiple target tracking method, which is able to deal with target interactions and prevent tracker failures due to hijacking. The referenced approach uses a Markov Chain Monte Carlo (MCMC) sampling step to evaluate the filter and constructs an efficient proposal density to generate new samples. This density integrates target interaction terms based on Markov Random Fields (MRFs) generated per time step. The MRFs model the interactions between targets in an attempt to reduce tracking ambiguity that typical particle filters suffer from when tracking multiple targets. A test sequence of 662 grayscale frames containing 20 interacting ants in a confined space was used to test both the proposed approach and a set of importance sampling based independent particle filters, to establish a performance comparison. It is shown that the implemented approach of modeling target interactions using MRF successfully corrects many of the tracking errors made by the independent, interaction unaware, particle filters.
Augmentation of base classifier performance via HMMs on a handwritten character data set
Nov 17, 2021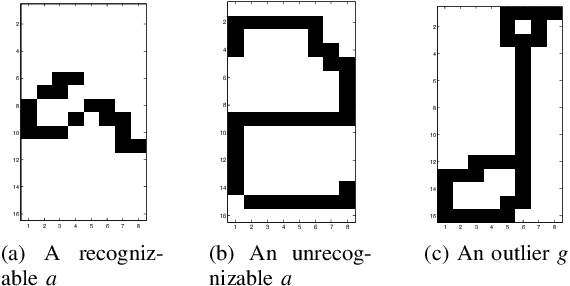
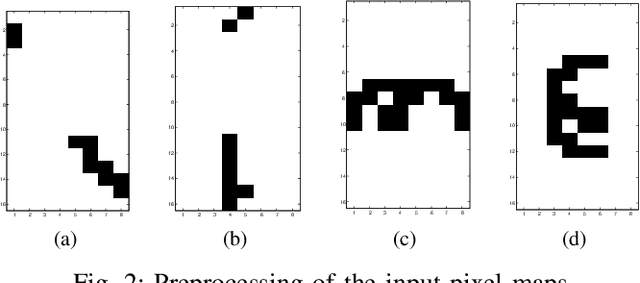
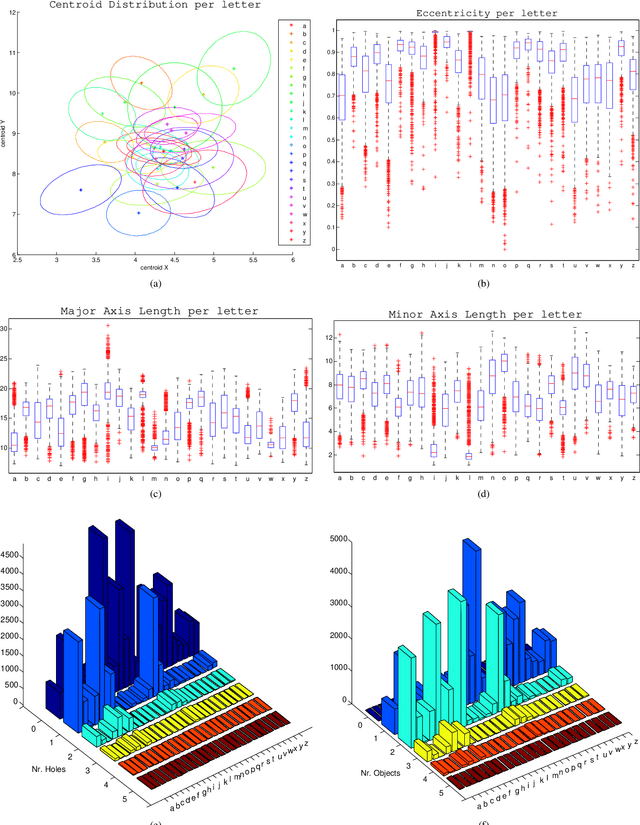
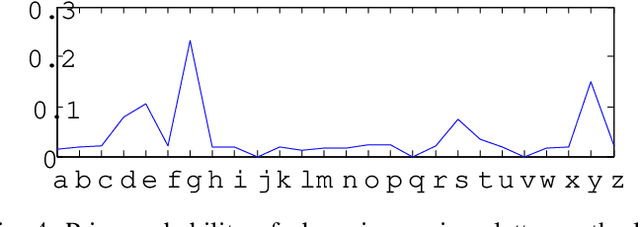
This paper presents results of a study of the performance of several base classifiers for recognition of handwritten characters of the modern Latin alphabet. Base classification performance is further enhanced by utilizing Viterbi error correction by determining the Viterbi sequence. Hidden Markov Models (HMMs) models exploit relationships between letters within a word to determine the most likely sequence of characters. Four base classifiers are studied along with eight feature sets extracted from the handwritten dataset. The best classification performance after correction was 89.8%, and the average was 68.1%
Design of a SOIMUMPs Inertial Sensor and readout Charge Amplifier
Nov 11, 2021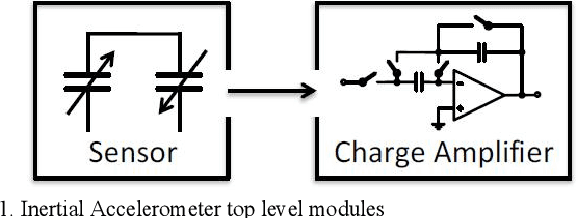
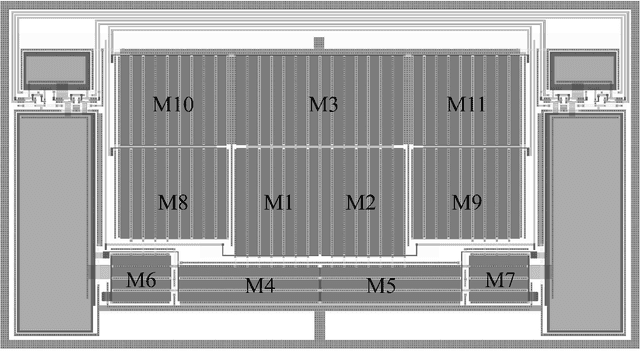
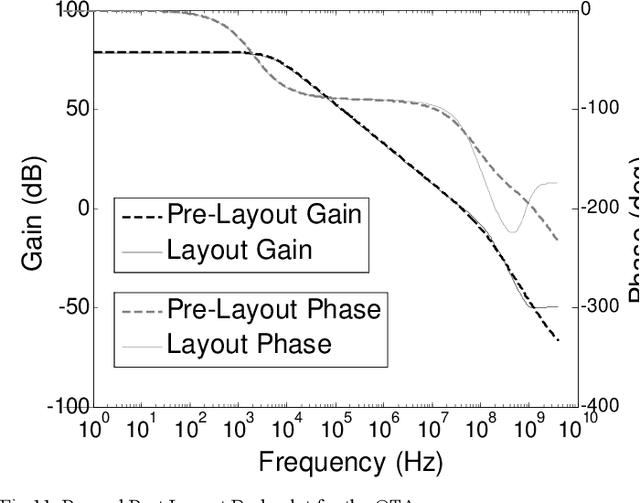
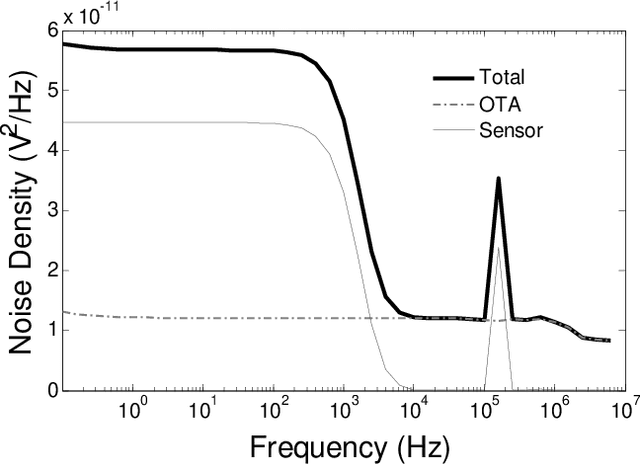
This paper presents the design and post-layout characteristics of a differential capacitance based inertial accelerometer This includes a MEMS based mechanical sensing element and a CMOS charge amplifier, which is the first stage of a readout circuit. The mechanical sensor is designed according to the SOIMUMPs fabrication process technology, and the readout circuit targeted AMS 0.35um technology. Post layout simulations indicated a +/-5G dynamic range, a maximum bandwidth of 1.58 kHz, non-linearity of 0.077% and a resolution of 10.5 uG/Hz^0.5. The readout circuit charge amplifier is fully differential and incorporated in a switched capacitor (SC) topology with CDS.