 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiple target tracking with interaction using an MCMC MRF Particle Filter
Nov 25, 2021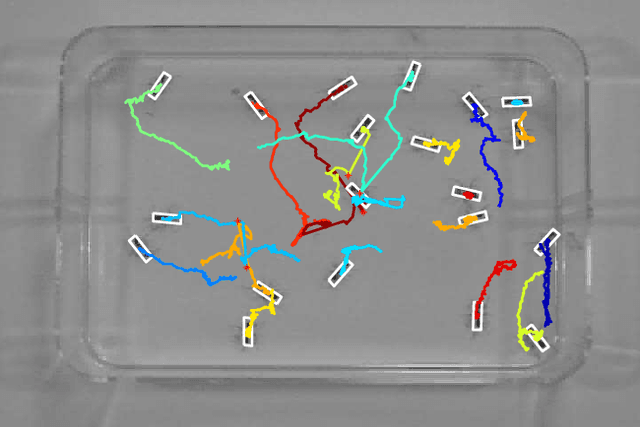
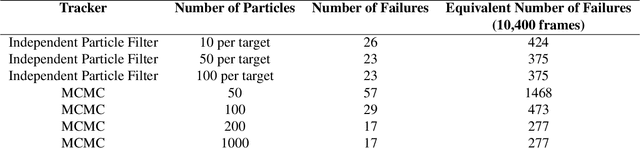

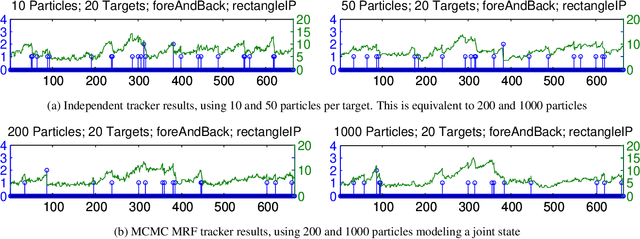
This paper presents and discusses an implementation of a multiple target tracking method, which is able to deal with target interactions and prevent tracker failures due to hijacking. The referenced approach uses a Markov Chain Monte Carlo (MCMC) sampling step to evaluate the filter and constructs an efficient proposal density to generate new samples. This density integrates target interaction terms based on Markov Random Fields (MRFs) generated per time step. The MRFs model the interactions between targets in an attempt to reduce tracking ambiguity that typical particle filters suffer from when tracking multiple targets. A test sequence of 662 grayscale frames containing 20 interacting ants in a confined space was used to test both the proposed approach and a set of importance sampling based independent particle filters, to establish a performance comparison. It is shown that the implemented approach of modeling target interactions using MRF successfully corrects many of the tracking errors made by the independent, interaction unaware, particle filters.