 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHUydra: Full-Range Lung CT Synthesis via Multiple HU Interval Generative Modelling
Mar 24, 2026Currently, a central challenge and bottleneck in the deployment and validation of computer-aided diagnosis (CAD) models within the field of medical imaging is data scarcity. For lung cancer, one of the most prevalent types worldwide, limited datasets can delay diagnosis and have an impact on patient outcome. Generative AI offers a promising solution for this issue, but dealing with the complex distribution of full Hounsfield Unit (HU) range lung CT scans is challenging and remains as a highly computationally demanding task. This paper introduces a novel decomposition strategy that synthesizes CT images one HU interval at a time, rather than modelling the entire HU domain at once. This framework focuses on training generative architectures on individual tissue-focused HU windows, then merges their output into a full-range scan via a learned reconstruction network that effectively reverses the HU-windowing process. We further propose multi-head and multi-decoder models to better capture textures while preserving anatomical consistency, with a multi-head VQVAE achieving the best performance for the generative task. Quantitative evaluation shows this approach significantly outperforms conventional 2D full-range baselines, achieving a 6.2% improvement in FID and superior MMD, Precision, and Recall across all HU intervals. The best performance is achieved by a multi-head VQVAE variant, demonstrating that it is possible to enhance visual fidelity and variability while also reducing model complexity and computational cost. This work establishes a new paradigm for structure-aware medical image synthesis, aligning generative modelling with clinical interpretation.
Markerless Multi-view 3D Human Pose Estimation: a survey
Jul 04, 2024



3D human pose estimation aims to reconstruct the human skeleton of all the individuals in a scene by detecting several body joints. The creation of accurate and efficient methods is required for several real-world applications including animation, human-robot interaction, surveillance systems or sports, among many others. However, several obstacles such as occlusions, random camera perspectives, or the scarcity of 3D labelled data, have been hampering the models' performance and limiting their deployment in real-world scenarios. The higher availability of cameras has led researchers to explore multi-view solutions due to the advantage of being able to exploit different perspectives to reconstruct the pose. Thus, the goal of this survey is to present an overview of the methodologies used to estimate the 3D pose in multi-view settings, understand what were the strategies found to address the various challenges and also, identify their limitations. Based on the reviewed articles, it was possible to find that no method is yet capable of solving all the challenges associated with the reconstruction of the 3D pose. Due to the existing trade-off between complexity and performance, the best method depends on the application scenario. Therefore, further research is still required to develop an approach capable of quickly inferring a highly accurate 3D pose with bearable computation cost. To this goal, techniques such as active learning, methods that learn with a low level of supervision, the incorporation of temporal consistency, view selection, estimation of depth information and multi-modal approaches might be interesting strategies to keep in mind when developing a new methodology to solve this task.
Vision-Radio Experimental Infrastructure Architecture Towards 6G
Feb 29, 2024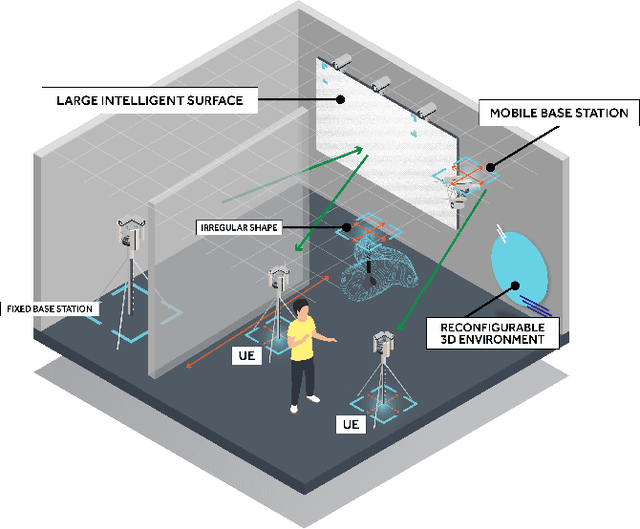
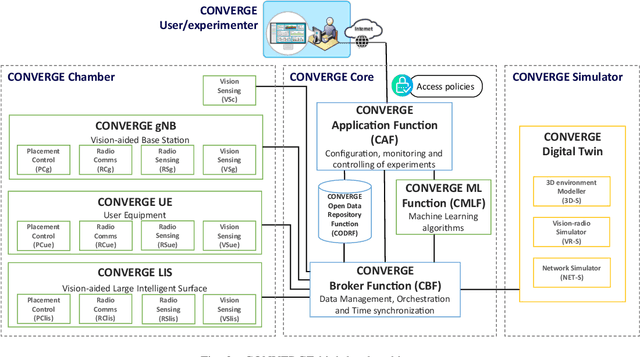
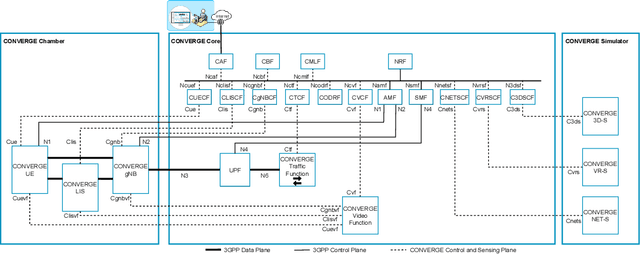
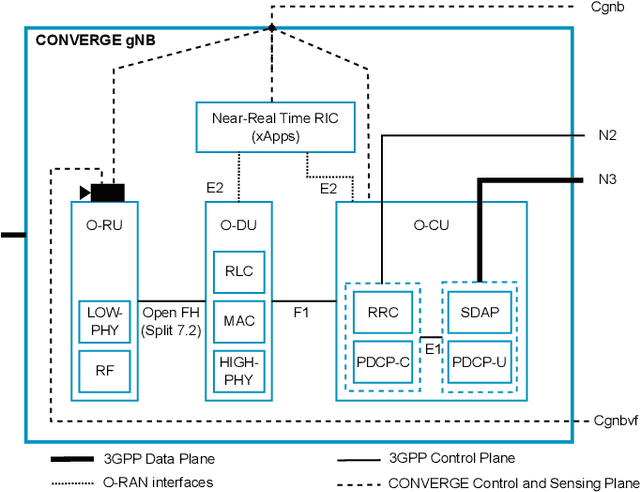
Telecommunications and computer vision have evolved separately so far. Yet, with the shift to sub-terahertz (sub-THz) and terahertz (THz) radio communications, there is an opportunity to explore computer vision technologies together with radio communications, considering the dependency of both technologies on Line of Sight. The combination of radio sensing and computer vision can address challenges such as obstructions and poor lighting. Also, machine learning algorithms, capable of processing multimodal data, play a crucial role in deriving insights from raw and low-level sensing data, offering a new level of abstraction that can enhance various applications and use cases such as beamforming and terminal handovers. This paper introduces CONVERGE, a pioneering vision-radio paradigm that bridges this gap by leveraging Integrated Sensing and Communication (ISAC) to facilitate a dual "View-to-Communicate, Communicate-to-View" approach. CONVERGE offers tools that merge wireless communications and computer vision, establishing a novel Research Infrastructure (RI) that will be open to the scientific community and capable of providing open datasets. This new infrastructure will support future research in 6G and beyond concerning multiple verticals, such as telecommunications, automotive, manufacturing, media, and health.
Computer Aided Detection of Deep Inferior Epigastric Perforators in Computed Tomography Angiography scans
Jul 24, 2019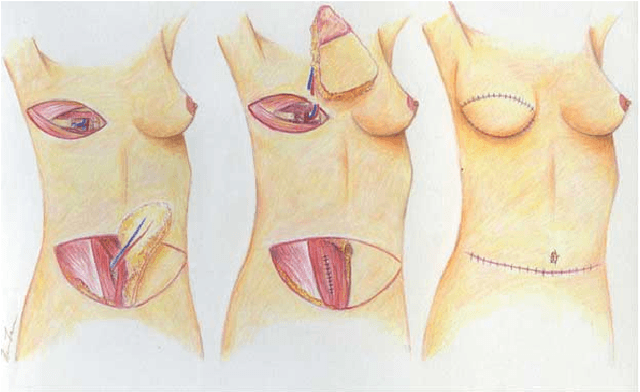
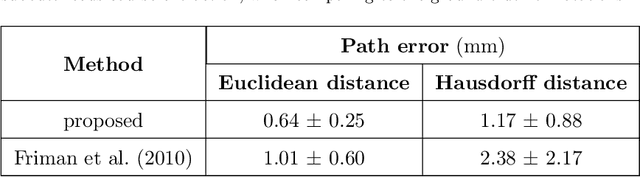
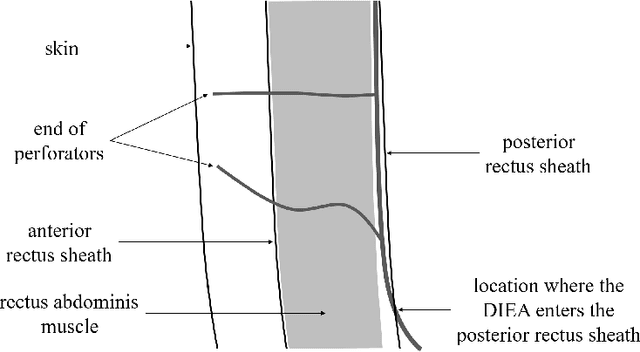
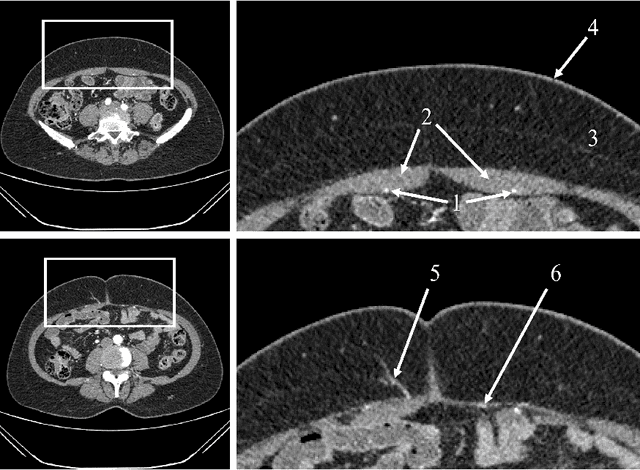
The deep inferior epigastric artery perforator (DIEAP) flap is the most common free flap used for breast reconstruction after a mastectomy. It makes use of the skin and fat of the lower abdomen to build a new breast mound either at the same time of the mastectomy or in a second surgery. This operation requires preoperative imaging studies to evaluate the branches - the perforators - that irrigate the tissue that will be used to reconstruct the breast mound. These branches will support tissue viability after the microsurgical ligation of the inferior epigastric vessels to the receptor vessels in the thorax. Usually through a Computed Tomography Angiography (CTA), each perforator, diameter and direction is manually identified by the imaging team, who will subsequently draw a map for the identification of the best vascular support for the reconstruction. In the current work we propose a semi-automatic methodology that aims at reducing the time and subjectivity inherent to the manual annotation. In 21 CTAs from patients proposed for breast reconstruction with DIEAP flaps, the subcutaneous region of each perforator was extracted, by means of a tracking procedure, whereas the intramuscular portion was detected through a minimum cost approach. Both were subsequently compared with the radiologist manual annotation. Results showed that the semi-automatic procedure was able to correctly detect the course of the DIEAPs with a minimum error (average error of 0.64 mm and 0.50 mm regarding the extraction of subcutaneous and intramuscular paths, respectively). The objective methodology is a promising tool in the automatic detection of perforators in CTA and can contribute to spare human resources and reduce subjectivity in the aforementioned task.