 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCONVERGE: A Multi-Agent Vision-Radio Architecture for xApps
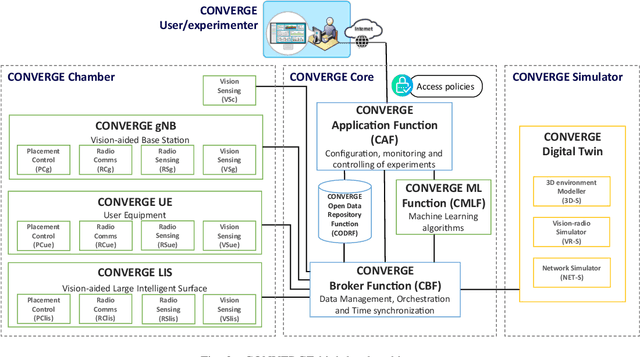
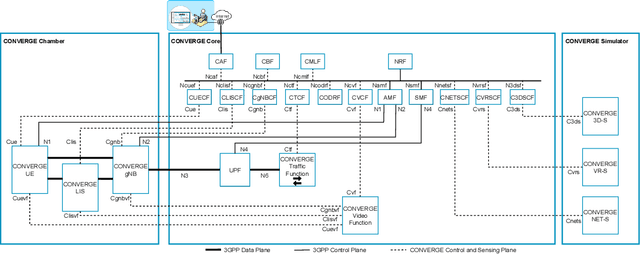
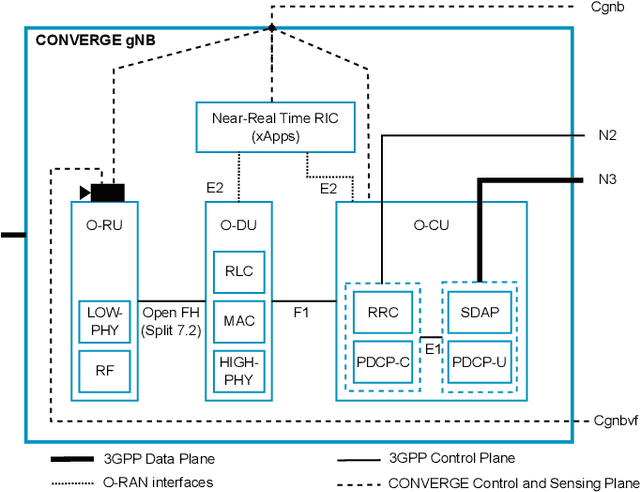
Aug 06, 2025Telecommunications and computer vision have evolved independently. With the emergence of high-frequency wireless links operating mostly in line-of-sight, visual data can help predict the channel dynamics by detecting obstacles and help overcoming them through beamforming or handover techniques. This paper proposes a novel architecture for delivering real-time radio and video sensing information to O-RAN xApps through a multi-agent approach, and introduces a new video function capable of generating blockage information for xApps, enabling Integrated Sensing and Communications. Experimental results show that the delay of sensing information remains under 1\,ms and that an xApp can successfully use radio and video sensing information to control the 5G/6G RAN in real-time.
Joint Optimization of Multi-UAV Deployment and 3D Positioning in Traffic-Aware Aerial Networks
Jun 16, 2025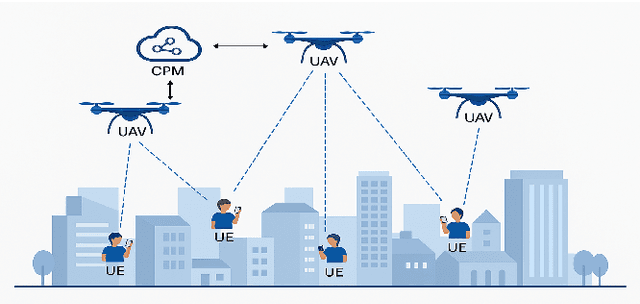
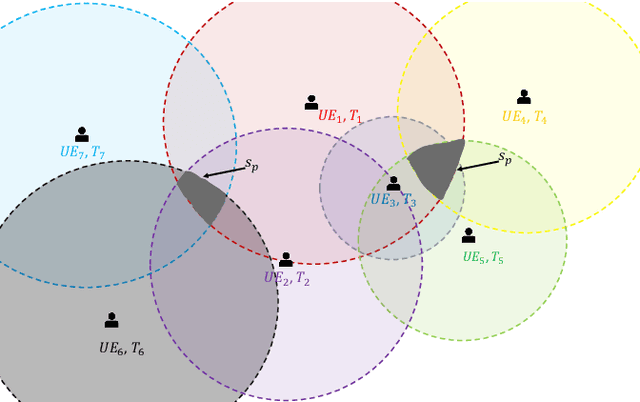
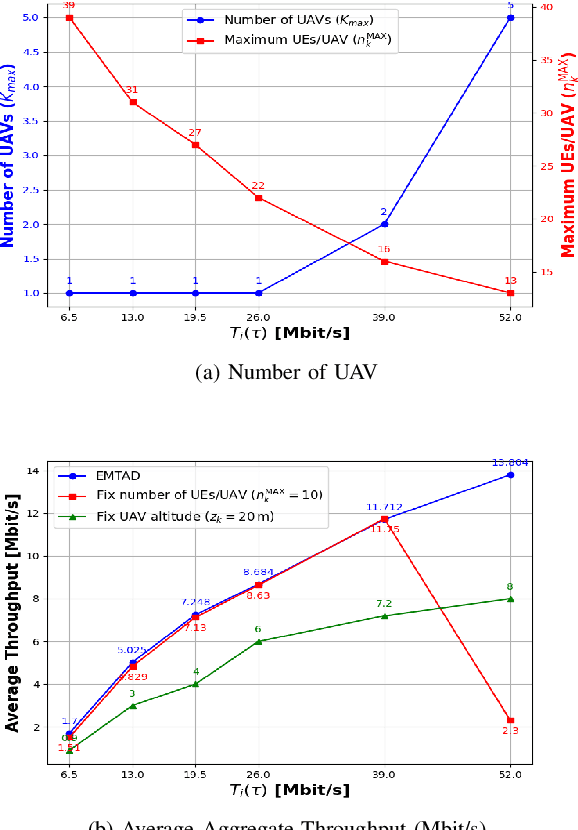
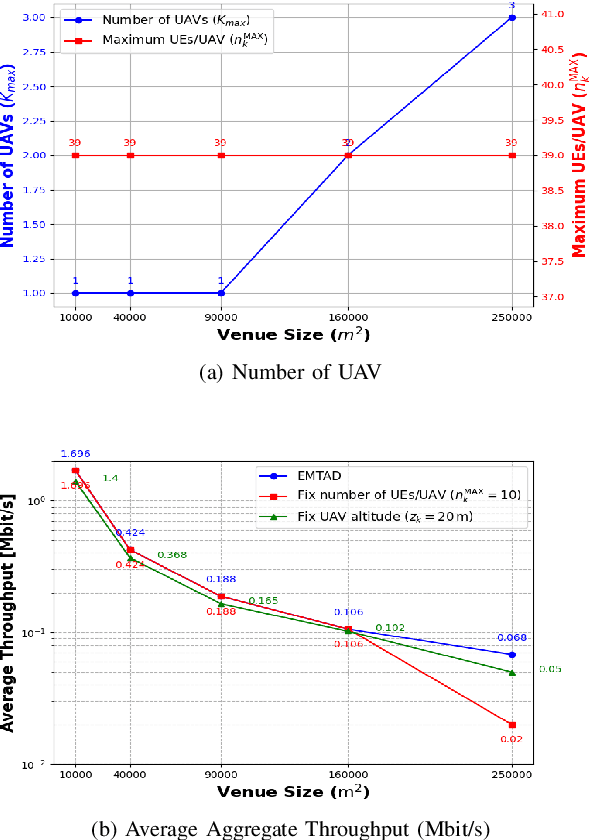
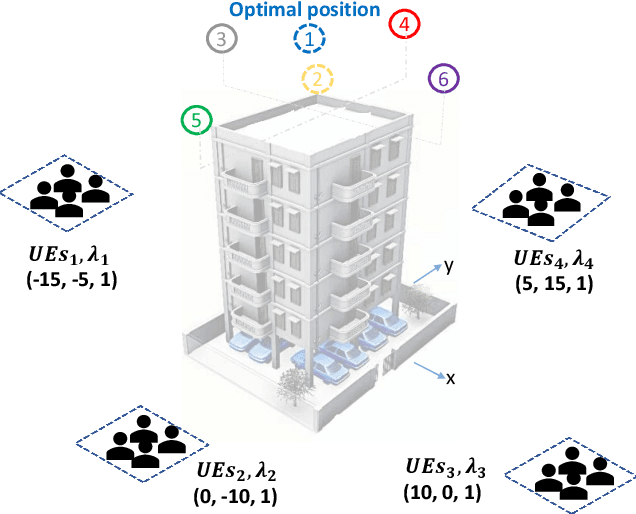
Unmanned Aerial Vehicles (UAVs) have emerged as a key enabler for next-generation wireless networks due to their on-demand deployment, high mobility, and ability to provide Line-of-Sight (LoS) connectivity. These features make UAVs particularly well-suited for dynamic and mission-critical applications such as intelligent transportation systems and emergency communications. However, effectively positioning multiple UAVs in real-time to meet non-uniform, time-varying traffic demands remains a significant challenge, especially when aiming to optimize network throughput and resource utilization. In this paper, we propose an Efficient Multi-UAV Traffic-Aware Deployment (EMTAD) Algorithm, a scalable and adaptive framework that dynamically adjusts UAV placements based on real-time user locations and spatial traffic distribution. In contrast to existing methods, EMTAD jointly optimizes UAV positioning and minimizes the number of deployed UAVs, ensuring efficient UE-UAV association while satisfying the traffic demand of users. Simulation results demonstrate that EMTAD significantly improves network performance while reducing deployment overhead by minimizing the number of UAVs required in dynamic and traffic-aware environments.
Traffic and Obstacle-aware UAV Positioning in Urban Environments Using Reinforcement Learning
Aug 07, 2024Unmanned Aerial Vehicles (UAVs) are suited as cost-effective and adaptable platforms for carrying Wi-Fi Access Points (APs) and cellular Base Stations (BSs). Implementing aerial networks in disaster management scenarios and crowded areas can effectively enhance Quality of Service (QoS). In such environments, maintaining Line-of-Sight (LoS), especially at higher frequencies, is crucial for ensuring reliable communication networks with high capacity, particularly in environments with obstacles. The main contribution of this paper is a traffic- and obstacle-aware UAV positioning algorithm named Reinforcement Learning-based Traffic and Obstacle-aware Positioning Algorithm (RLTOPA), for such environments. RLTOPA determines the optimal position of the UAV by considering the positions of ground users, the coordinates of obstacles, and the traffic demands of users. This positioning aims to maximize QoS in terms of throughput by ensuring optimal LoS between ground users and the UAV. The network performance of the proposed solution, characterized in terms of mean delay and throughput, was evaluated using the ns- 3 simulator. The results show up to 95% improvement in aggregate throughput and 71% in delay without compromising fairness.
Vision-Radio Experimental Infrastructure Architecture Towards 6G
Feb 29, 2024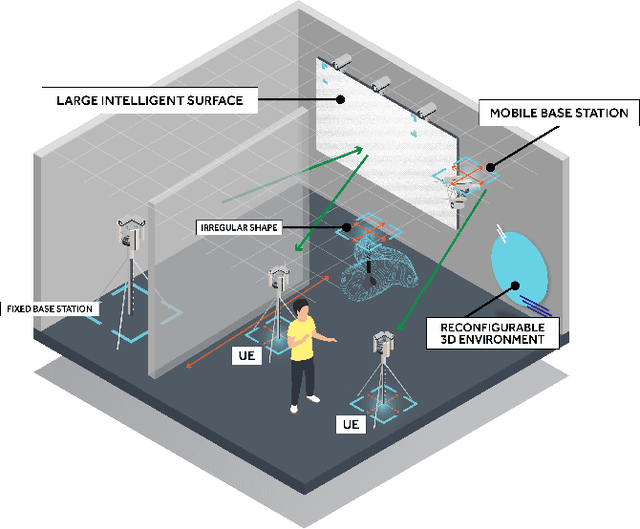
Telecommunications and computer vision have evolved separately so far. Yet, with the shift to sub-terahertz (sub-THz) and terahertz (THz) radio communications, there is an opportunity to explore computer vision technologies together with radio communications, considering the dependency of both technologies on Line of Sight. The combination of radio sensing and computer vision can address challenges such as obstructions and poor lighting. Also, machine learning algorithms, capable of processing multimodal data, play a crucial role in deriving insights from raw and low-level sensing data, offering a new level of abstraction that can enhance various applications and use cases such as beamforming and terminal handovers. This paper introduces CONVERGE, a pioneering vision-radio paradigm that bridges this gap by leveraging Integrated Sensing and Communication (ISAC) to facilitate a dual "View-to-Communicate, Communicate-to-View" approach. CONVERGE offers tools that merge wireless communications and computer vision, establishing a novel Research Infrastructure (RI) that will be open to the scientific community and capable of providing open datasets. This new infrastructure will support future research in 6G and beyond concerning multiple verticals, such as telecommunications, automotive, manufacturing, media, and health.
Joint Traffic and Obstacle-aware UAV Positioning Algorithm for Aerial Networks
Jul 31, 2023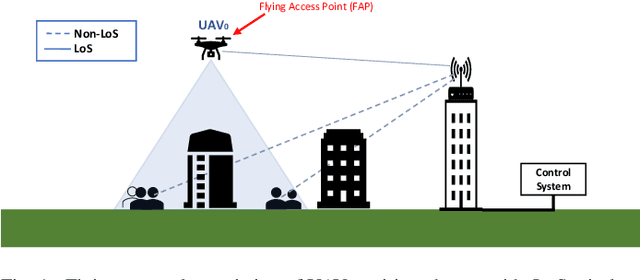
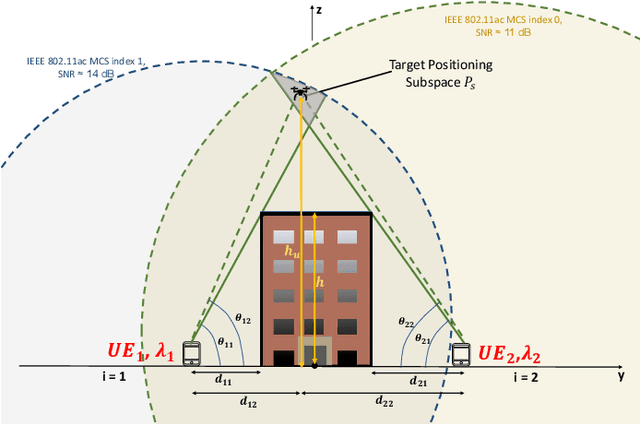
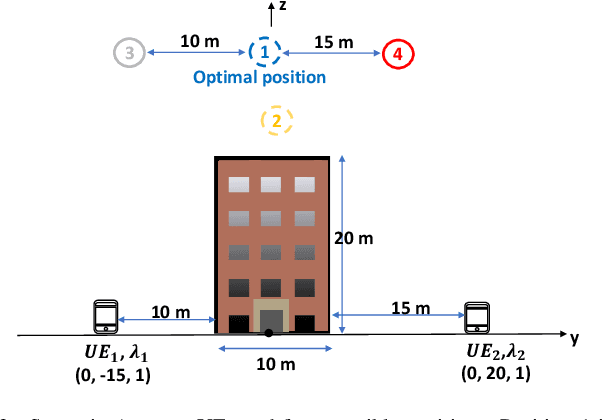
Unmanned Aerial Vehicles (UAVs) are increasingly used as cost-effective and flexible Wi-Fi Access Points (APs) and cellular Base Stations (BSs) to enhance Quality of Service (QoS). In disaster management scenarios, UAV-based networks provide on-demand wireless connectivity when traditional infrastructures fail. In obstacle-rich environments like urban areas, reliable high-capacity communications links depend on Line-of-Sight (LoS) availability, especially at higher frequencies. Positioning UAVs to consider obstacles and enable LoS communications represents a promising solution that requires further exploration and development. The main contribution of this paper is the Traffic- and Obstacle-aware UAV Positioning Algorithm (TOPA). TOPA takes into account the users' traffic demand and the need for LoS between the UAV and the ground users in the presence of obstacles. The network performance achieved when using TOPA was evaluated through ns-3 simulations. The results show up to 100% improvement in the aggregate throughput without compromising fairness.
UAV-Assisted Wireless Communications: An Experimental Analysis of Air-to-Ground and Ground-to-Air Channels in Open Environments
Mar 29, 2023

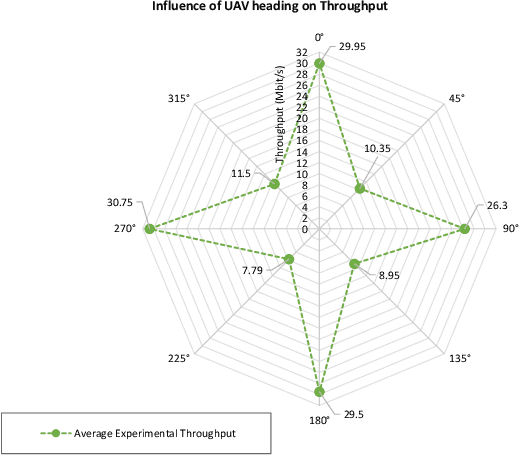
Unmanned Aerial Vehicles (UAVs) offer promising potential as communications node carriers, providing on-demand wireless connectivity to users. While existing literature presents various channel models, they often overlook the impact of UAV heading. This paper experimentally characterizes Air-to-Ground (A2G) and Ground-to-Air (G2A) wireless channels in obstacle-free, interference-free open environments, accounting for distance and UAV heading. We analyze the Received Signal Strength Indicator (RSSI) and TCP throughput between ground users and UAVs, covering distances between 50 m and 500 m, and considering different UAV headings. Our study offers a more accurate channel model characterization compared to deterministic models such as Friis and two-ray. Additionally, we characterize the antenna's radiation pattern based on UAV headings.