 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of Switching Technologies for Reflective and Transmissive RISs at Sub-THz Frequencies
Apr 28, 2025For the upcoming 6G wireless networks, reconfigurable intelligent surfaces are an essential technology, enabling dynamic beamforming and signal manipulation in both reflective and transmissive modes. It is expected to utilize frequency bands in the millimeter-wave and THz, which presents unique opportunities but also significant challenges. The selection of switching technologies that can support high-frequency operation with minimal loss and high efficiency is particularly complex. In this work, we demonstrate the potential of advanced components such as Schottky diodes, memristor switches, liquid metal-based switches, phase change materials, and RF-SOI technology in RIS designs as an alternative to overcome limitations inherent in traditional technologies in D-band (110-170 GHz).
Human Activity Recognition with a 6.5 GHz Reconfigurable Intelligent Surface for Wi-Fi 6E
Jan 24, 2025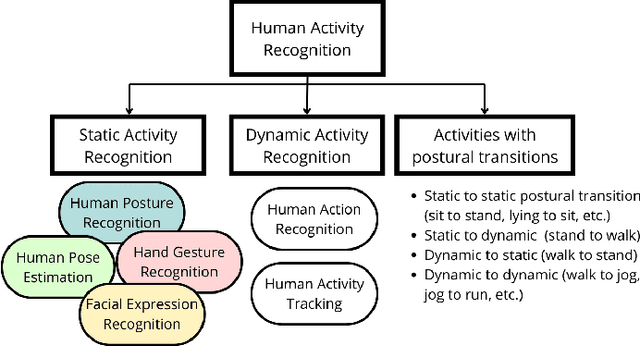
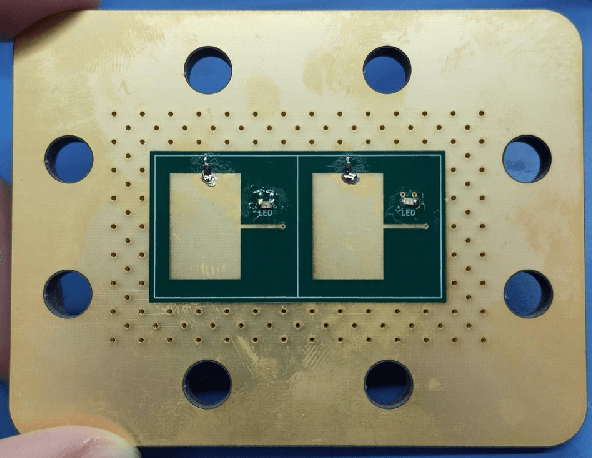
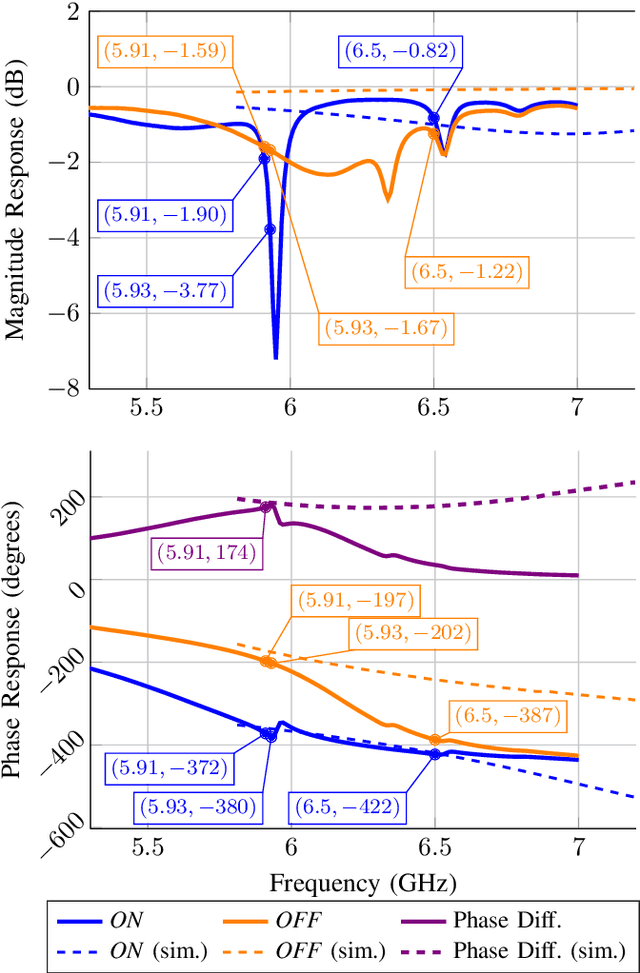
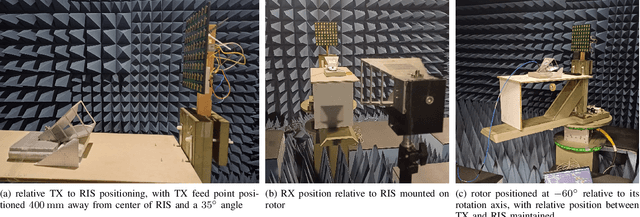
Human Activity Recognition (HAR) is the identification and classification of static and dynamic human activities, which find applicability in domains like healthcare, entertainment, security, and cyber-physical systems. Traditional HAR approaches rely on wearable sensors, vision-based systems, or ambient sensing, each with inherent limitations such as privacy concerns or restricted sensing conditions. Recently, Radio Frequency (RF)-based HAR has emerged, relying on the interaction of RF signals with people to infer activities. Reconfigurable Intelligent Surfaces (RISs) offers significant potential in this domain by enabling dynamic control over the wireless environment, thus enhancing the information extracted from RF signals. We present an Hand Gesture Recognition (HGR) approach that employs our own 6.5 GHz RIS design to manipulate the RF medium in an area of interest. We validate the capability of our RIS to control the medium by characterizing its steering response, and further we gather and publish a dataset for HGR classification for three different hand gestures. By employing two Convolutional Neural Networks (CNNs) models trained on data gathered under random and optimized RIS configuration sequences, we achieved classification accuracies exceeding 90%.
Enhancing NLoS RIS-Aided Localization with Optimization and Machine Learning
May 03, 2024This paper introduces two machine learning optimization algorithms to significantly enhance position estimation in Reconfigurable Intelligent Surface (RIS) aided localization for mobile user equipment in Non-Line-of-Sight conditions. Leveraging the strengths of these algorithms, we present two methods capable of achieving extremely high accuracy, reaching sub-centimeter or even sub-millimeter levels at 3.5 GHz. The simulation results highlight the potential of these approaches, showing significant improvements in indoor mobile localization. The demonstrated precision and reliability of the proposed methods offer new opportunities for practical applications in real-world scenarios, particularly in Non-Line-of-Sight indoor localization. By evaluating four optimization techniques, we determine that a combination of a Genetic Algorithm (GA) and Particle Swarm Optimization (PSO) results in localization errors under 30 cm in 90 % of the cases, and under 5 mm for close to 85 % of cases when considering a simulated room of 10 m by 10 m where two of the walls are equipped with RIS tiles.
A Deep Learning Approach in RIS-based Indoor Localization
May 03, 2024In the domain of RIS-based indoor localization, our work introduces two distinct approaches to address real-world challenges. The first method is based on deep learning, employing a Long Short-Term Memory (LSTM) network. The second, a novel LSTM-PSO hybrid, strategically takes advantage of deep learning and optimization techniques. Our simulations encompass practical scenarios, including variations in RIS placement and the intricate dynamics of multipath effects, all in Non-Line-of-Sight conditions. Our methods can achieve very high reliability, obtaining centimeter-level accuracy for the 98th percentile (worst case) in a different set of conditions, including the presence of the multipath effect. Furthermore, our hybrid approach showcases remarkable resolution, achieving sub-millimeter-level accuracy in numerous scenarios.
Design and Experimental Evaluation of a Bluetooth 5.1 Antenna Array for Angle-of-Arrival Estimation
Apr 26, 2022



On the of the applications in the realm of the Internet-of-Things (IoT) is real-time localization of assets in specific application environments where satellite based global positioning is unviable. Numerous approaches for localization relying on wireless sensor mesh systems have been evaluated, but the recent Bluetooth Low Energy (BLE) 5.1 direction finding features based on Angle-of-Arrival (AoA) promise a low-cost solution for this application. In this paper, we present an implementation of a BLE 5.1 based circular antenna array, and perform two experimental evaluations over the quality of the retrieved data sampled from the array: in an anechoic chamber, and in a real-world environment using a setup composed of four BLE beacons.