 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuroBench: Advancing Neuromorphic Computing through Collaborative, Fair and Representative Benchmarking
Apr 15, 2023



The field of neuromorphic computing holds great promise in terms of advancing computing efficiency and capabilities by following brain-inspired principles. However, the rich diversity of techniques employed in neuromorphic research has resulted in a lack of clear standards for benchmarking, hindering effective evaluation of the advantages and strengths of neuromorphic methods compared to traditional deep-learning-based methods. This paper presents a collaborative effort, bringing together members from academia and the industry, to define benchmarks for neuromorphic computing: NeuroBench. The goals of NeuroBench are to be a collaborative, fair, and representative benchmark suite developed by the community, for the community. In this paper, we discuss the challenges associated with benchmarking neuromorphic solutions, and outline the key features of NeuroBench. We believe that NeuroBench will be a significant step towards defining standards that can unify the goals of neuromorphic computing and drive its technological progress. Please visit neurobench.ai for the latest updates on the benchmark tasks and metrics.
Long-Lived Accurate Keypoints in Event Streams
Oct 07, 2022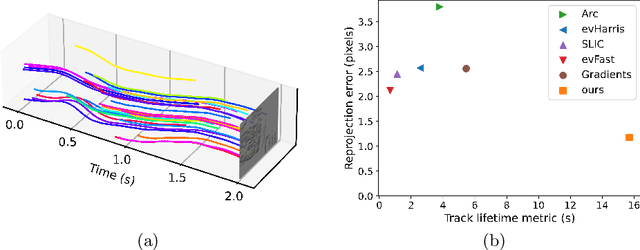
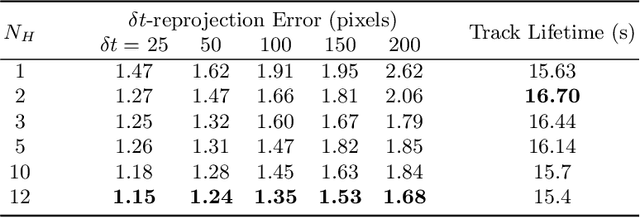
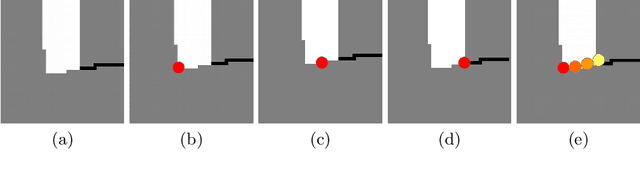
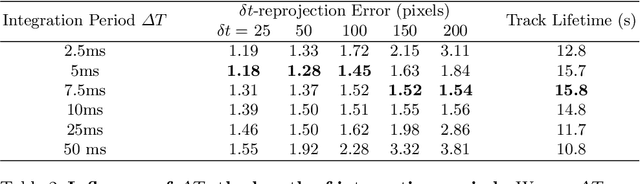
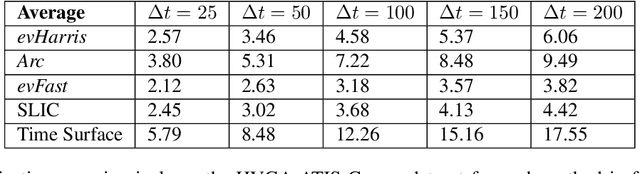
We present a novel end-to-end approach to keypoint detection and tracking in an event stream that provides better precision and much longer keypoint tracks than previous methods. This is made possible by two contributions working together. First, we propose a simple procedure to generate stable keypoint labels, which we use to train a recurrent architecture. This training data results in detections that are very consistent over time. Moreover, we observe that previous methods for keypoint detection work on a representation (such as the time surface) that integrates events over a period of time. Since this integration is required, we claim it is better to predict the keypoints' trajectories for the time period rather than single locations, as done in previous approaches. We predict these trajectories in the form of a series of heatmaps for the integration time period. This improves the keypoint localization. Our architecture can also be kept very simple, which results in very fast inference times. We demonstrate our approach on the HVGA ATIS Corner dataset as well as "The Event-Camera Dataset and Simulator" dataset, and show it results in keypoint tracks that are three times longer and nearly twice as accurate as the best previous state-of-the-art methods. We believe our approach can be generalized to other event-based camera problems, and we release our source code to encourage other authors to explore it.
Learning to Detect Objects with a 1 Megapixel Event Camera
Sep 28, 2020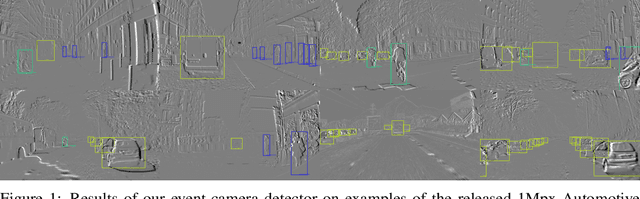

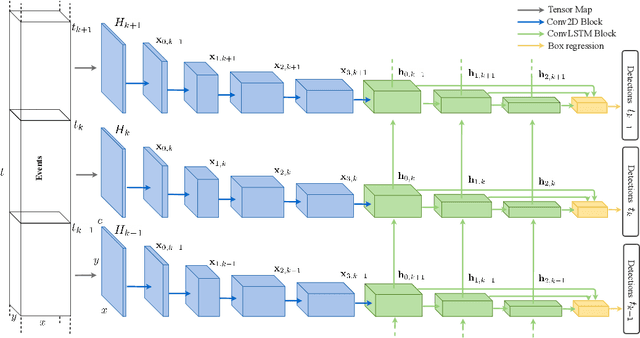
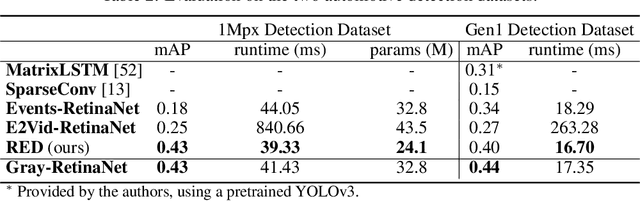
Event cameras encode visual information with high temporal precision, low data-rate, and high-dynamic range. Thanks to these characteristics, event cameras are particularly suited for scenarios with high motion, challenging lighting conditions and requiring low latency. However, due to the novelty of the field, the performance of event-based systems on many vision tasks is still lower compared to conventional frame-based solutions. The main reasons for this performance gap are: the lower spatial resolution of event sensors, compared to frame cameras; the lack of large-scale training datasets; the absence of well established deep learning architectures for event-based processing. In this paper, we address all these problems in the context of an event-based object detection task. First, we publicly release the first high-resolution large-scale dataset for object detection. The dataset contains more than 14 hours recordings of a 1 megapixel event camera, in automotive scenarios, together with 25M bounding boxes of cars, pedestrians, and two-wheelers, labeled at high frequency. Second, we introduce a novel recurrent architecture for event-based detection and a temporal consistency loss for better-behaved training. The ability to compactly represent the sequence of events into the internal memory of the model is essential to achieve high accuracy. Our model outperforms by a large margin feed-forward event-based architectures. Moreover, our method does not require any reconstruction of intensity images from events, showing that training directly from raw events is possible, more efficient, and more accurate than passing through an intermediate intensity image. Experiments on the dataset introduced in this work, for which events and gray level images are available, show performance on par with that of highly tuned and studied frame-based detectors.
A Large Scale Event-based Detection Dataset for Automotive
Jan 31, 2020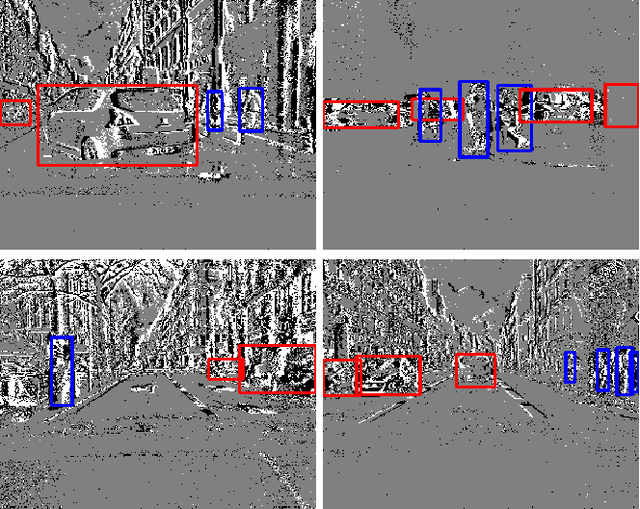
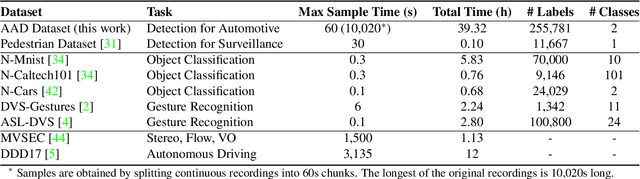

We introduce the first very large detection dataset for event cameras. The dataset is composed of more than 39 hours of automotive recordings acquired with a 304x240 ATIS sensor. It contains open roads and very diverse driving scenarios, ranging from urban, highway, suburbs and countryside scenes, as well as different weather and illumination conditions. Manual bounding box annotations of cars and pedestrians contained in the recordings are also provided at a frequency between 1 and 4Hz, yielding more than 255,000 labels in total. We believe that the availability of a labeled dataset of this size will contribute to major advances in event-based vision tasks such as object detection and classification. We also expect benefits in other tasks such as optical flow, structure from motion and tracking, where for example, the large amount of data can be leveraged by self-supervised learning methods.
Speed Invariant Time Surface for Learning to Detect Corner Points with Event-Based Cameras
Apr 30, 2019

We propose a learning approach to corner detection for event-based cameras that is stable even under fast and abrupt motions. Event-based cameras offer high temporal resolution, power efficiency, and high dynamic range. However, the properties of event-based data are very different compared to standard intensity images, and simple extensions of corner detection methods designed for these images do not perform well on event-based data. We first introduce an efficient way to compute a time surface that is invariant to the speed of the objects. We then show that we can train a Random Forest to recognize events generated by a moving corner from our time surface. Random Forests are also extremely efficient, and therefore a good choice to deal with the high capture frequency of event-based cameras ---our implementation processes up to 1.6Mev/s on a single CPU. Thanks to our time surface formulation and this learning approach, our method is significantly more robust to abrupt changes of direction of the corners compared to previous ones. Our method also naturally assigns a confidence score for the corners, which can be useful for postprocessing. Moreover, we introduce a high-resolution dataset suitable for quantitative evaluation and comparison of corner detection methods for event-based cameras. We call our approach SILC, for Speed Invariant Learned Corners, and compare it to the state-of-the-art with extensive experiments, showing better performance.
HATS: Histograms of Averaged Time Surfaces for Robust Event-based Object Classification
Mar 21, 2018
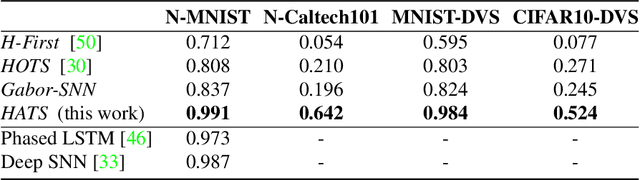

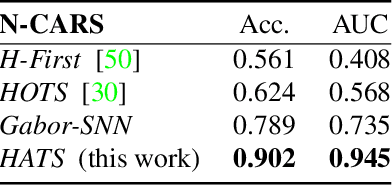
Event-based cameras have recently drawn the attention of the Computer Vision community thanks to their advantages in terms of high temporal resolution, low power consumption and high dynamic range, compared to traditional frame-based cameras. These properties make event-based cameras an ideal choice for autonomous vehicles, robot navigation or UAV vision, among others. However, the accuracy of event-based object classification algorithms, which is of crucial importance for any reliable system working in real-world conditions, is still far behind their frame-based counterparts. Two main reasons for this performance gap are: 1. The lack of effective low-level representations and architectures for event-based object classification and 2. The absence of large real-world event-based datasets. In this paper we address both problems. First, we introduce a novel event-based feature representation together with a new machine learning architecture. Compared to previous approaches, we use local memory units to efficiently leverage past temporal information and build a robust event-based representation. Second, we release the first large real-world event-based dataset for object classification. We compare our method to the state-of-the-art with extensive experiments, showing better classification performance and real-time computation.