 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpeed Invariant Time Surface for Learning to Detect Corner Points with Event-Based Cameras
Apr 30, 2019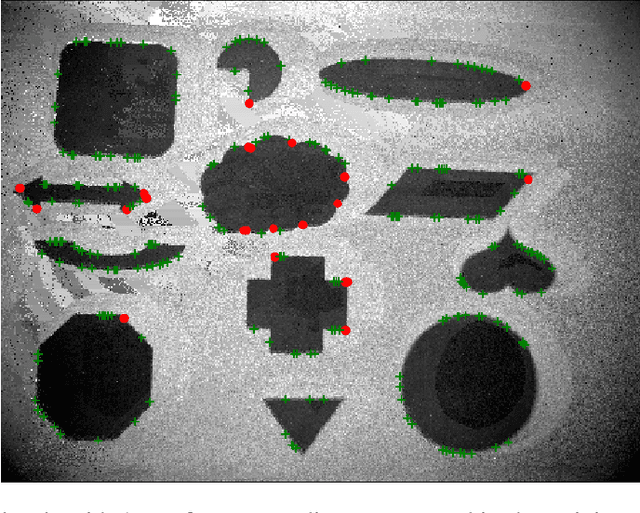
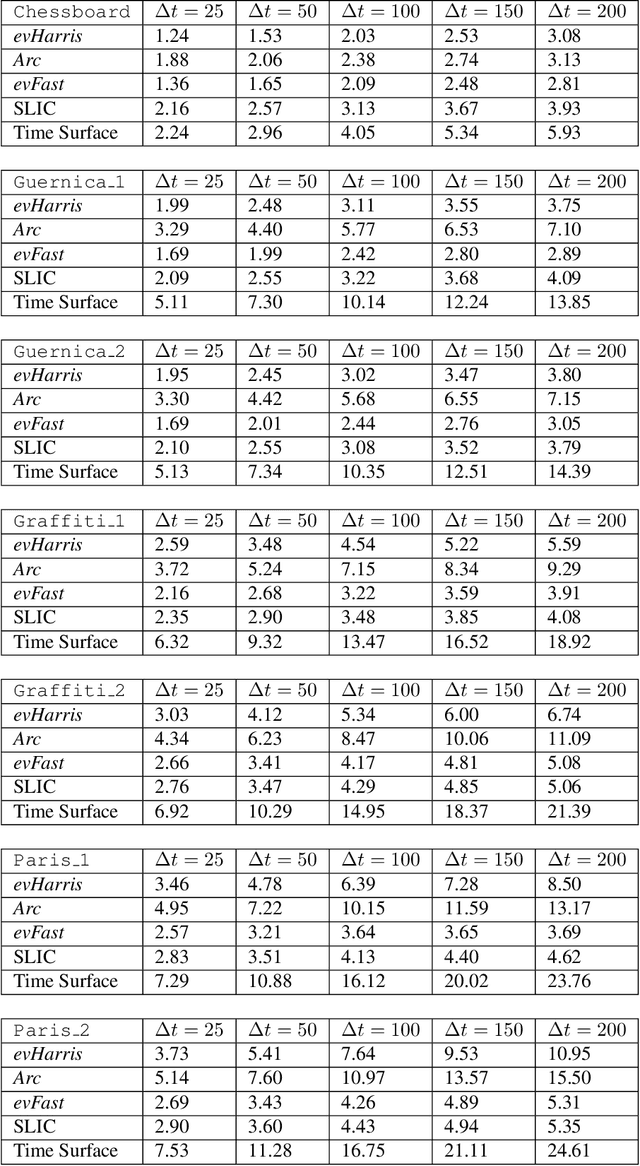

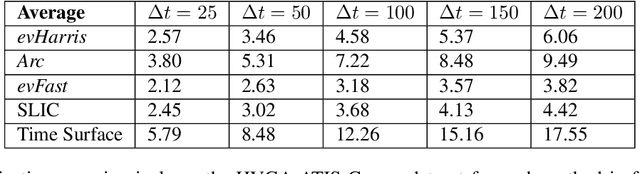
We propose a learning approach to corner detection for event-based cameras that is stable even under fast and abrupt motions. Event-based cameras offer high temporal resolution, power efficiency, and high dynamic range. However, the properties of event-based data are very different compared to standard intensity images, and simple extensions of corner detection methods designed for these images do not perform well on event-based data. We first introduce an efficient way to compute a time surface that is invariant to the speed of the objects. We then show that we can train a Random Forest to recognize events generated by a moving corner from our time surface. Random Forests are also extremely efficient, and therefore a good choice to deal with the high capture frequency of event-based cameras ---our implementation processes up to 1.6Mev/s on a single CPU. Thanks to our time surface formulation and this learning approach, our method is significantly more robust to abrupt changes of direction of the corners compared to previous ones. Our method also naturally assigns a confidence score for the corners, which can be useful for postprocessing. Moreover, we introduce a high-resolution dataset suitable for quantitative evaluation and comparison of corner detection methods for event-based cameras. We call our approach SILC, for Speed Invariant Learned Corners, and compare it to the state-of-the-art with extensive experiments, showing better performance.
HATS: Histograms of Averaged Time Surfaces for Robust Event-based Object Classification
Mar 21, 2018
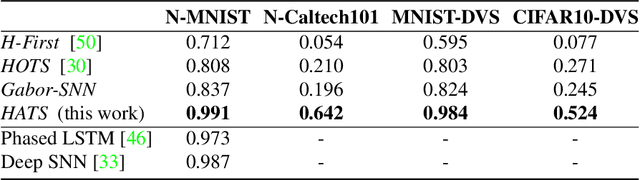

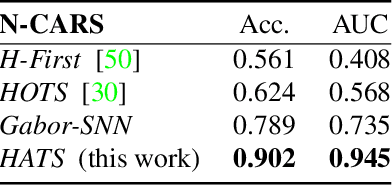
Event-based cameras have recently drawn the attention of the Computer Vision community thanks to their advantages in terms of high temporal resolution, low power consumption and high dynamic range, compared to traditional frame-based cameras. These properties make event-based cameras an ideal choice for autonomous vehicles, robot navigation or UAV vision, among others. However, the accuracy of event-based object classification algorithms, which is of crucial importance for any reliable system working in real-world conditions, is still far behind their frame-based counterparts. Two main reasons for this performance gap are: 1. The lack of effective low-level representations and architectures for event-based object classification and 2. The absence of large real-world event-based datasets. In this paper we address both problems. First, we introduce a novel event-based feature representation together with a new machine learning architecture. Compared to previous approaches, we use local memory units to efficiently leverage past temporal information and build a robust event-based representation. Second, we release the first large real-world event-based dataset for object classification. We compare our method to the state-of-the-art with extensive experiments, showing better classification performance and real-time computation.
Adaboost with "Keypoint Presence Features" for Real-Time Vehicle Visual Detection
Oct 07, 2009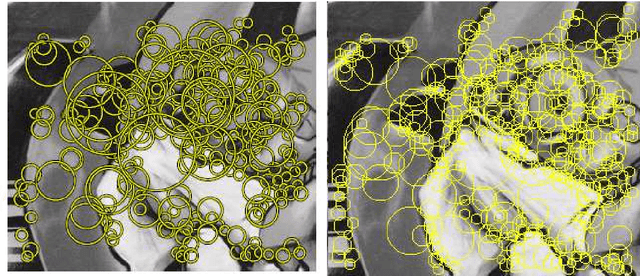
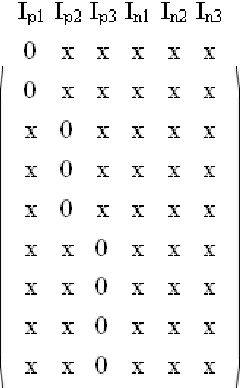
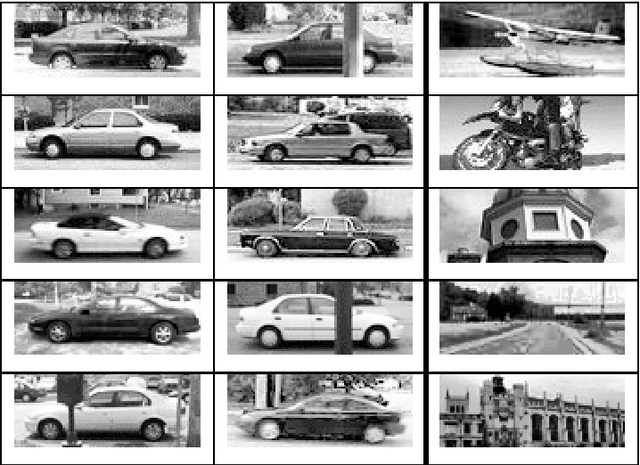
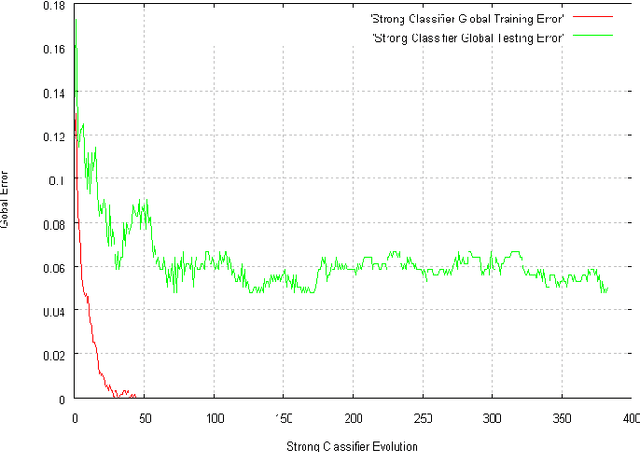
We present promising results for real-time vehicle visual detection, obtained with adaBoost using new original ?keypoints presence features?. These weak-classifiers produce a boolean response based on presence or absence in the tested image of a ?keypoint? (~ a SURF interest point) with a descriptor sufficiently similar (i.e. within a given distance) to a reference descriptor characterizing the feature. A first experiment was conducted on a public image dataset containing lateral-viewed cars, yielding 95% recall with 95% precision on test set. Moreover, analysis of the positions of adaBoost-selected keypoints show that they correspond to a specific part of the object category (such as ?wheel? or ?side skirt?) and thus have a ?semantic? meaning.